00193463-01 - 第40页
1 Introduction, technical data User Manual SIPLACE S -25 HM 1.13 Overview of the modules - placement heads Software Version SR.503.xx 04/2002 US Edition 40 1.13 Overv iew of the mo dules - place ment heads 1.13.1 Structu…
User Manual SIPLACE S-25 HM 1 Introduction, technical data
Software Version SR.503.xx 04/2002 US Edition 1.12 Overview of the modules - gantries
39
1.12.3 Technical data for the X-axis
1.12.4 Structure of the Y-axis
The Y-axis essentially consists of the following main modules: 1
– Y-axis three-phase AC servomotor
– Y-axis toothed belt
– Y-axis guide system
– Y-axis measuring system
1
Each Y-axis is driven by a three-phase AC servomotor. An anti-crash circuit prevents the travers-
ing paths of the gantries meeting. 1
1.12.5 Technical data for the Y-axis
Drive Three-phase AC servomotor/toothed belt
Maximum speed 2.5 m/sec.
Traversing path 620 mm
Distance measuring system Metal linear scale
Scale length 646 mm
Resolution 2.5 µm
Drive Three-phase AC servomotor/toothed belt
Maximum speed 2.5 m/sec.
Traversing path of the gantries 910 mm
Distance measuring system Metal linear scale
Scale length 970 mm
Resolution 2.5 µm
1 Introduction, technical data User Manual SIPLACE S-25 HM
1.13 Overview of the modules - placement heads Software Version SR.503.xx 04/2002 US Edition
40
1.13 Overview of the modules - placement heads
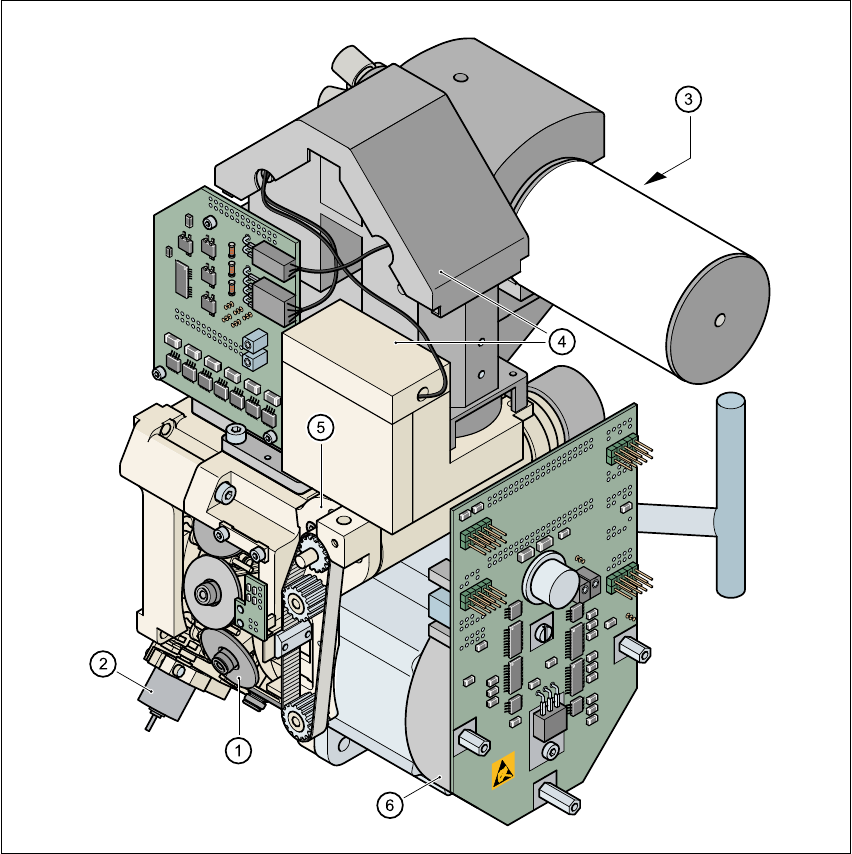
1.13.1 Structure of the 12-segment Collect&Place head
with standard component vision module
1
Fig. 1.13 - 1 Structure of the 12-segment Collect&Place head with standard component vision module
(1) Star with 12 sleeves (2) Motor for "Reject" valve adjustment drive
(3) Turning station (4) Component vision module
(5) Z-axis drive (6) Star motor
User Manual SIPLACE S-25 HM 1 Introduction, technical data
Software Version SR.503.xx 04/2002 US Edition 1.13 Overview of the modules - placement heads
41
All the components are inserted with the same cycle time. Before the component is inserted, it is
measured by the optoelectronic vision module. 1
– The component vision camera creates an image of the current component.
– The precise position of the component is also determined.
– The package form of the current component is compared against the programmed package
form in order to identify it. Any components that cannot be identified are rejected.
– The turning station turns the component to the required placement position.
1.13.2 Description of the 12-segment Collect&Place head
– The 12-segment Collect&Place head works using the "collect & place" principle, i.e. the com-
ponents are held by the nozzles with the aid of a vacuum and, after one complete pick-up cycle,
are placed gently and accurately on the PCB with the aid of forced air. The vacuum in the noz-
zles is also checked several times to determine whether the components were picked up and
set down correctly.
– The "adaptive" sensor stop mode of the z axis compensates for any irregularity of the PCB sur-
face when the components are set down.
– Defective components are rejected and are picked up again during a repair run.
1.13.3 Technical data - 12-segment Collect&Place head
with standard component vision module
1
Range of components 0201 to PLCC44, including BGA, µBGA, flip-chip,
TSOP, QFP, PLCC, SO to SO32, DRAM
Component specification
Max. height
Min. lead pitch
Min. bump pitch
Min. ball/bump diameter
Min. dimensions
Max. dimensions
Max. weight
6 mm
0.5 mm
0.35 mm
0.2 mm
0.6 mm x 0.3 mm
18.7 mm x 18.7 mm
2 g
Maximum stroke of the Z axis 16 mm
Programmable set-down force 2.4 to 5.0 N
Max. placement rate 12,500 components/h
Nozzle types 9xx
Angular accuracy ± 0.70° / 4
σ
Placement accuracy ± 90 µm / 4 σ