HS50_advance_level 2.pdf - 第136页
07/2002 Editio n Student G uide HS -50 Advanc ed II 6 Cont rol & C ommun icatio n 6 & $ 1 % XV +LVWRU\ RIWKH &$ 1%X V The &$ 1 or & ontroll er $ rea 1 etwork is an a dvanced serial bus …
Student Guide HS-50 Advanced II 07/2002 Edition
6 Control & Communication
5
&RQWURO&RPPXQLFDWLRQ
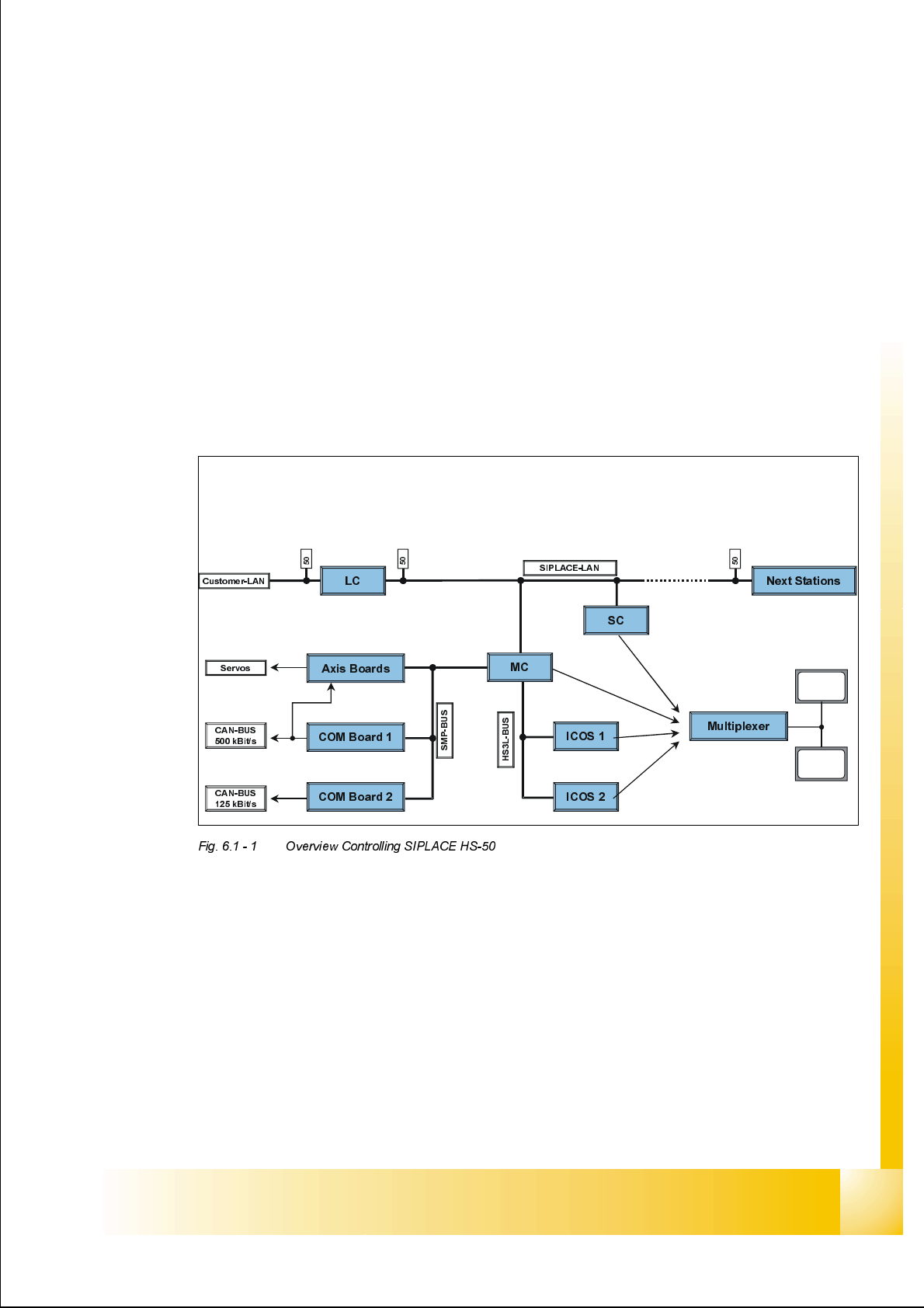
&RQWURO6WUXFWXUH
The control structure is mainly based on three sections:
– The SIPLACE-LAN being the interconnection between line computer and every single station
computer and machine controller of the whole line.
– The axis controlling responsible for any axis movement and input / output function in the ma-
chine.
– The vision system measuring the components and fiducials below the cameras.
!9LVLRQ6\VWHP
!$[LV&RQWUROOLQJ
!/$16WUXFWXUH
Ω
Ω
Ω
07/2002 Edition Student Guide HS-50 Advanced II
6 Control & Communication
6
&$1%XV
+LVWRU\RIWKH&$1%XV
The &$1 or &ontroller $rea 1etwork is an advanced serial bus system that efficiently supports
distributed control systems. It was initially developed for the use in motor vehicles by Robert
Bosch GmbH, Germany, in the late 1980s, who hold the CAN license. CAN is most widely used
in the automotive and industrial market segments. Typical applications for CAN are motor vehi-
cles, utility vehicles, and industrial automation. Other applications for CAN are trains, medical
equipment, building automation, household appliances, and office automation.
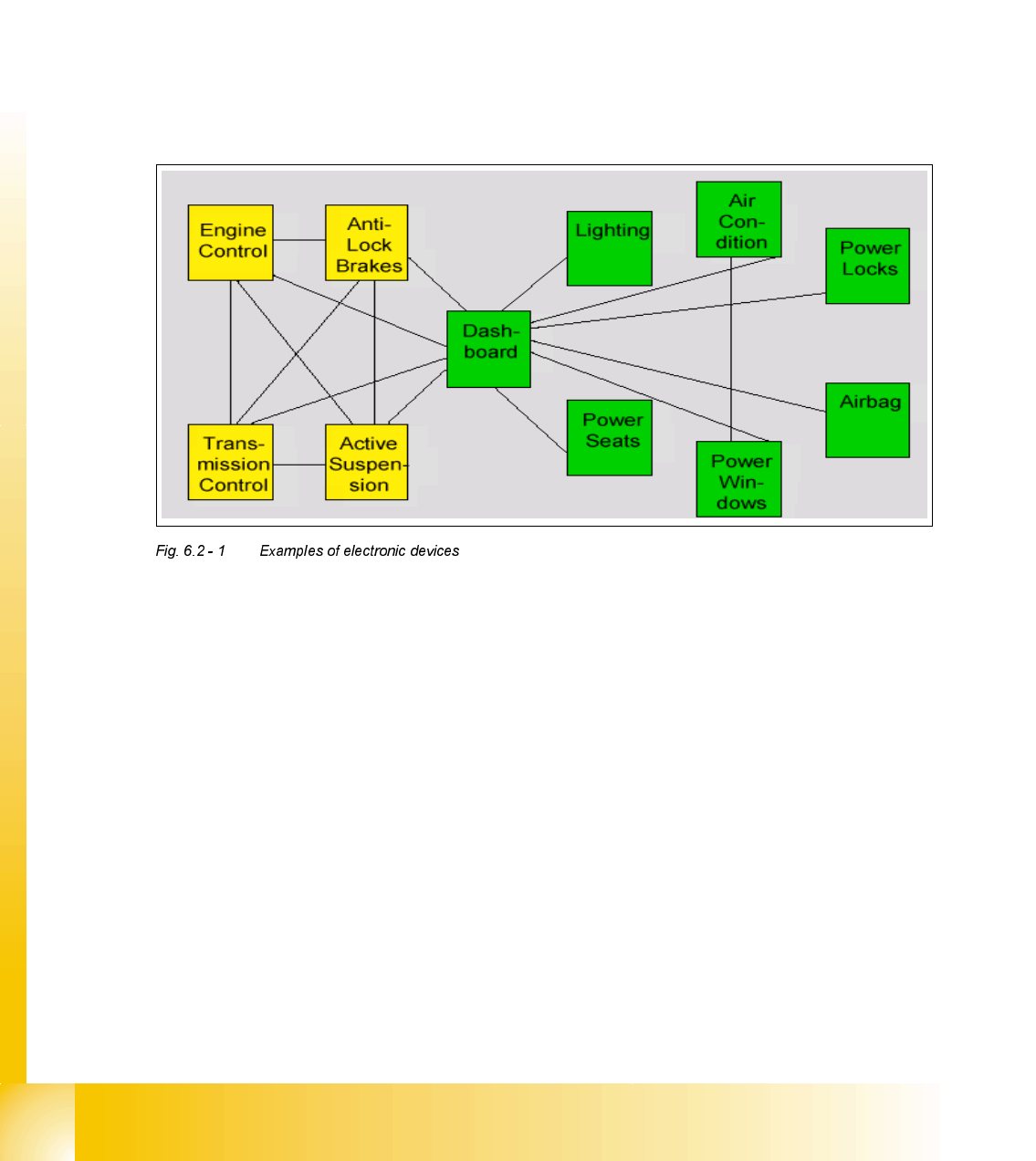
The development of CAN began when more and more electronic devices were implemented into
modern motor vehicles. Examples of such devices include engine management systems, active
suspension, ABS, gear control, lighting control, air conditioning, airbags and central locking. All
this means more safety and more comfort for the driver and of course a reduction of fuel consump-
tion and exhaust emissions.
Student Guide HS-50 Advanced II 07/2002 Edition
6 Control & Communication
7
To improve the behavior of the vehicle even further, it was necessary for the different control sys-
tems (and their sensors) to exchange information. This was usually done by discrete interconnec-
tion of the different systems (i.e. point to point wiring). The requirement for information exchange
has then grown to such an extent that a cable network with a length of up to several miles and
many connectors was required. This produced growing problems concerning material cost, pro-
duction time and reliability.
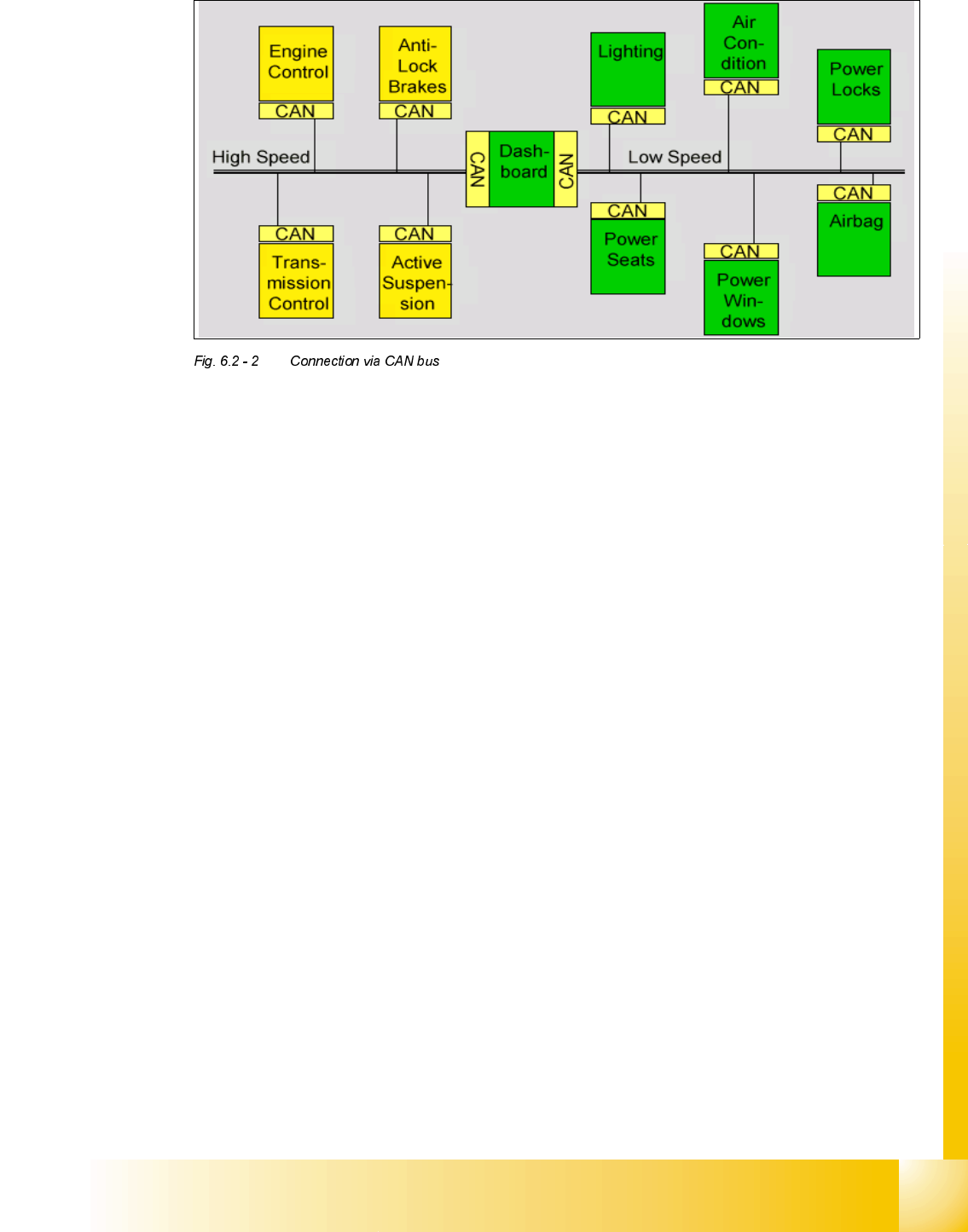
The solution to this problem was the connection of the control systems via a serial bus system.
This bus had to fulfill some special requirements due to its usage in a vehicle. With the use of CAN,
point-to-point wiring is replaced by one serial bus connecting all control systems. This is accom-
plished by adding some CAN-specific hardware to each control unit that provides the "rules" or
protocol for transmitting and receiving information via the bus.
Due to the high volume production in the automotive and industrial markets, low cost protocol de-
vices are available.CAN is a multi-master bus with an open, linear structure with one logic bus line
and equal nodes. The number of nodes is not limited by the protocol. In the CAN protocol, the bus
nodes do not have a specific address. Instead, the address information is contained in the identi-
fiers of the transmitted messages, indicating the message content and the priority of the message.
The number of nodes may be changed dynamically without disturbing the communication of the
other nodes. Multicasting and Broadcasting is supported by CAN.
There is a high data transfer rate of 1000 kilobits per second at a maximum bus length of 40
meters or 130 feet when using a twisted wire pair which is the most common bus medium used
for CAN. Message length is short with a maximum of 8 data bytes per message and there is a low
latency between transmission request and start of transmission.
The bus access is handled via the advanced serial communications protocol Carrier Sense Mul-
tiple Access/Collision Detection with Non-Destructive Arbitration. This means that collision of
messages is avoided by bitwise arbitration without loss of time.