HS50_advance_level 2.pdf - 第149页
Stud ent Gu ide HS-5 0 Adva nced II 07/2 002 Ed ition 6 Control & Co mmunicatio n 19 3RVLWLRQF RQWUROV\VWHP This sy stem consi sts of the fol lowing. T he ’ mailbo x’ is used to stor e the p osition of th e axis …
07/2002 Edition Student Guide HS-50 Advanced II
6 Control & Communication
18
)XQFWLRQLQJRIWKH$[HV%RDUGV
$[LV6HUYR&DUG3ULQFLSOHV
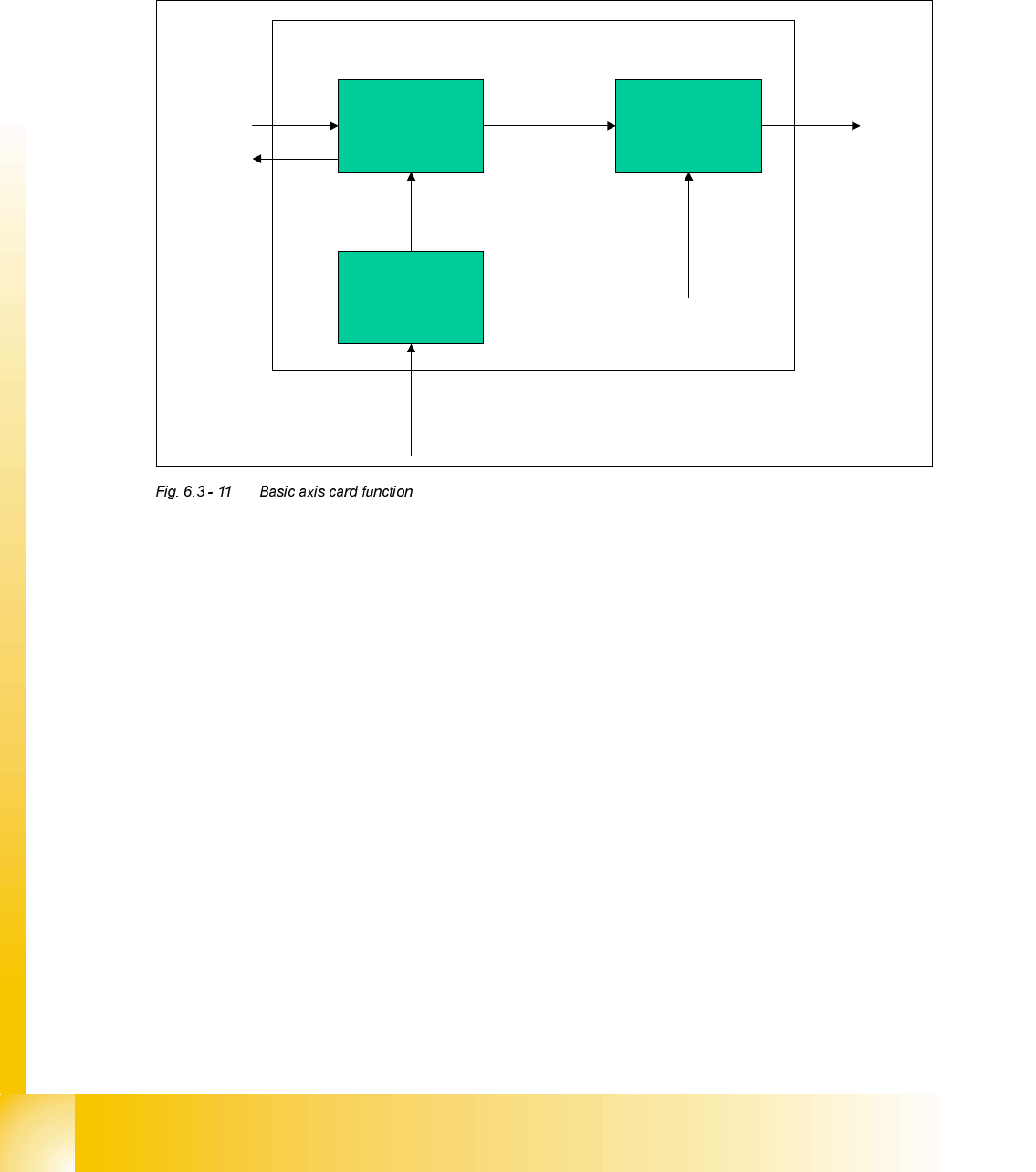
Basic axis card function
The axis boards control the movement of the axes. The axis controller receives commands and
the necessary parameters via SMP bus connection from the MC. In the same way an end signal
is returned to the MC. The axis controller outputs a direct voltage to the speed controller in the
servo amplifier (V nom). The voltage level and the polarity here determine the speed of movement
and the direction.
An additional voltage (force) is supplied to the servo amplifier which is used to set the force limit
during Z-axis movement. Also with this output we generate another signal to speed up the accel-
eration and deceleration phase of X and Y (S2x) axis movement.
The current position of the axis is determined by means of the incremental path / angle measure-
ment system (track signals).
7KHD[LVFRQWUROOHUFRQVLVWVRIDSRVLWLRQDQGVSHHGGHWHFWLRQV\VWHP
This system uses the track signals produced by the encoder system. Within the system the posi-
tion counter is used to detect the current position. An overshoot counter is used during the final
positioning of the axis to monitor any overshoot passed the target position.
There is a speed detection system on the axis controller to prevent the axis from a crash situation
because of too high an axis speed. (info see error message "axis tachointerrupt")
Position Control
System
Speed Control
System (not for
Z axis)
Position and speed
detection system
Control signals
to & from
machine
controller
via SMP BUS.
Track signals from encoder system
Analogue
Signals to Servo
Card
( V nom + force
)
Student Guide HS-50 Advanced II 07/2002 Edition
6 Control & Communication
19
3RVLWLRQFRQWUROV\VWHP
This system consists of the following. The ’mailbox’ is used to store the position of the axis re-
quired by the machine controller (the ’Target’ position). The ’Target’ position and the actual posi-
tion, given by the position detection system, are supplied to a comparator, which compares the 2
inputs. The result is supplied to the ’Position Controller’, which outputs the required parameters
for the axis movement.
6SHHG&RQWUROV\VWHPIRUDGGLWLRQDOVSHHGXSGXULQJDFFHOHUDWLRQGHFHOHUDWLRQ
This system takes the output from the ’Position Controller’ and the input from the speed detection
system and compares them. This results in a speed requirement, which is fed to the servo card.
The digital signals are converted into an analogue output by a DAC. There are actually 2 outputs,
firstly the V nom, which directly controls the speed and direction of the movement. Secondly there
is the force output, which is used for the initial acceleration of the X & Y axis on S2x machines.
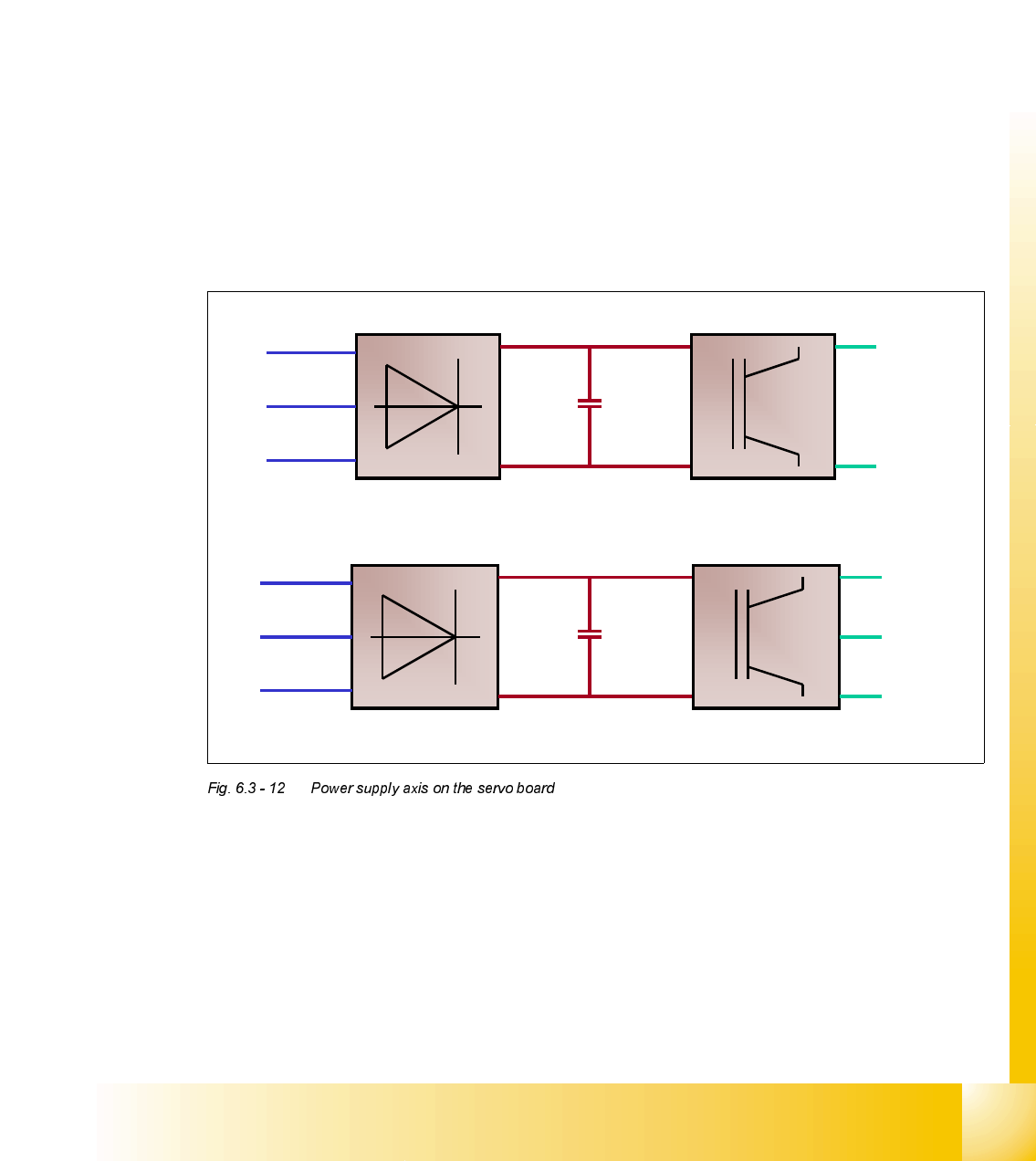
3RZHU6XSSO\$[LVRQWKH6HUYR%RDUG
With a rectifier we generate an appropriate constant DC-Voltage for the power semiconductor of
the axis servo amplifier. The power semiconductor on the DC servo board varies the DC-voltage
according to the speed the motor should move. If the motor should reverse the polarity is changed.
The power semiconductor on the AC servo board sets the voltage so that a sinusoidal motor cur-
rent moves the AC-motor. If the motor should speed up the frequency is increased. If the motor
should reverse the phase sequence is changed.
Power supply DC Axes
+
+ / -
AC from
Transformer
Constant DC
Motor DC
current
accordin
g
turning direction
AC from
Transformer
Constant DC
Sinusoidal
motor curren
t
+
Power supply 3 phase AC axis
07/2002 Edition Student Guide HS-50 Advanced II
6 Control & Communication
20
%DOODVW&LUFXLW
The kinetic energy, stored in the motor and load is fed back into the power supply unit during brak-
ing by the servo amplifier. In the case of large moments of inertia the energy take-up of the filter
capacitors in the power supply units is inadequate, and the servo amplifier would be isolated dur-
ing breaking. To prevent this from happening the ballast circuit absorbs the remaining energy and
ensures correct braking via the servo amplifier.
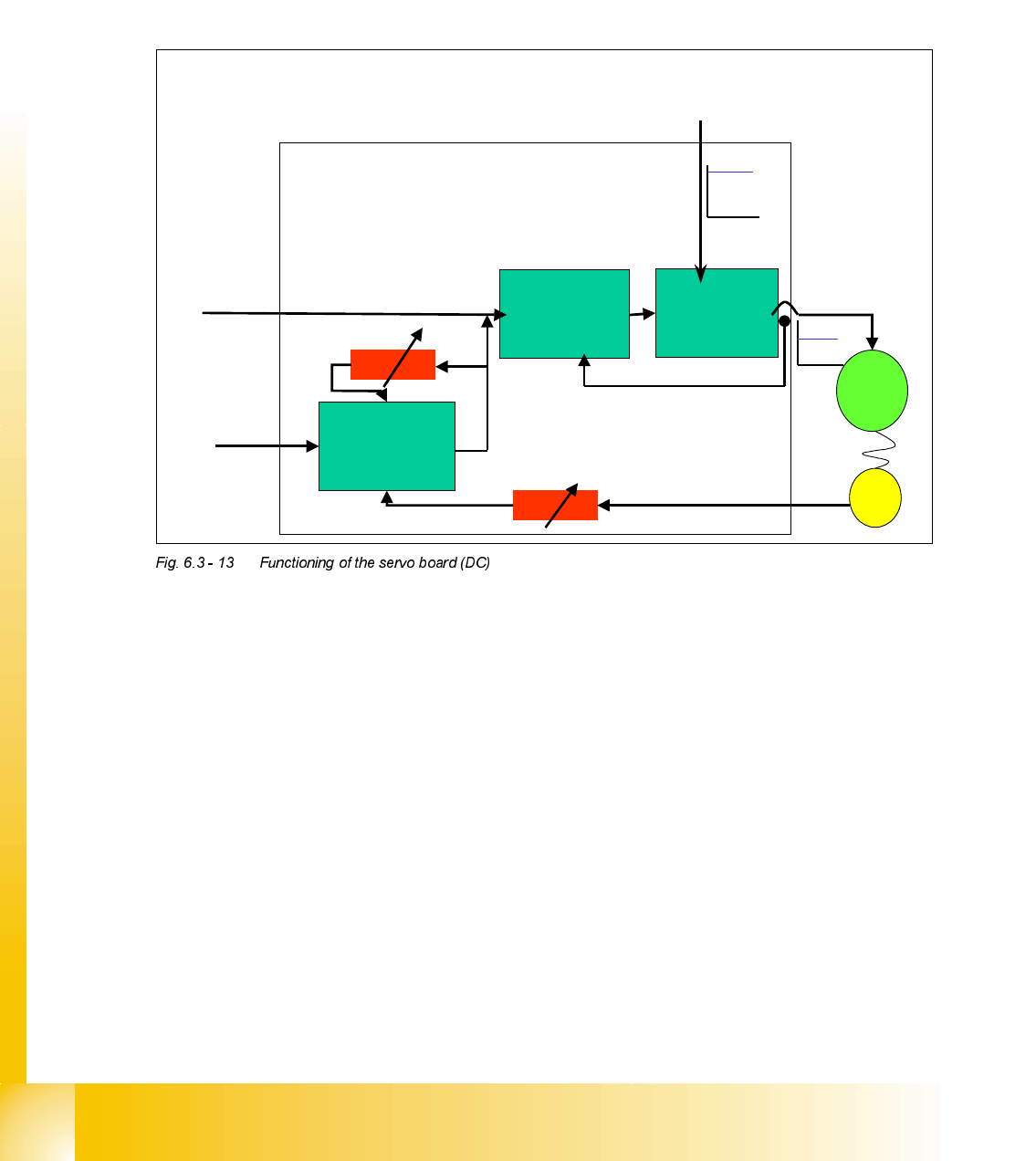
)XQFWLRQLQJRIWKH6HUYR%RDUG'&
The servo amplifier is used as final controlling element for the actual speed of the axis drive. It
attempts to adjust the motor voltage so that the system deviation between specified setpoint
speed and tacho-generator feedback is as small as possible. For force control a power controller
is available. The power controller (current sensor mode) is only used with the Z-axis, when com-
ponents are being mounted with higher placement force (the minimum z-axis force is defined by
the spring loaded sleeve).
7KH6HUYRFDUGFRQVLVWVRI530&RPSDUDWRUDQG&RQWUROOHU
This system compares the setpoint speed requirement, given by the axis controller (V nom) with
the actual motor speed given by the tacho generator fixed to the motor shaft. The tacho generator
generates a voltage, which is directly proportional to speed; the faster the motor turns the higher
the generated voltage. The amount of tacho voltage feed back into the system can be controlled
by adjustment of the tacho potentiometer on the servo card. Therefore motor speed can be directly
affected by adjustment of the tacho potentiometer. The P-gain of this RPM-controller is adjusted
to control the positioning quality of the axis. Therefore you check can the positioning quality ac-
cording to the size and the amount of overshoots after crossing the target position for the first time.
Basic DC-Servo Card Function
Analogue
control signals
from Axis card.
RPM Controller
with Comparator
Motor Control
System
Motor Current
control loop
with Comparator
Controlled
voltage to
motor.
V Nom
V Force
Tacho Adjustment
P Gain Adjustment
Motor
Tacho
Power supply