HS50_advance_level 2.pdf - 第153页
Stud ent Gu ide HS-5 0 Adva nced II 07/2 002 Ed ition 6 Control & Co mmunicatio n 23 $ [LV3RVLW LRQLQJ7 KHRU\Z KHQ2Y HUVK RRW2FF XUV ([SODQD WLRQRI 7H UPV 3RVLWLRQL QJ0RGH This m eans m oving th…

07/2002 Edition Student Guide HS-50 Advanced II
6 Control & Communication
22
0RWRUFXUUHQWFRQWUROORRSDQGFRPSDUDWRU
The output of the Axis controller produces the Nominal value (I
nom_U
/ I
nom _W
) for motor current
controller loop. The output of the servo system is fed back current controller loop in order to control
the limit of the motor current. Fixed value resistors limit the maximum motor current and they are
specified by the motor data. Additionally the I2t current control loop checked the nominal value (I
nom_U
/ I
nom_W
) which are coming from the Axis controller.
The nominal value (I
nom_U
/ I
nom _W
) put themselves together as follows (axes controller):
theoretical value which results from calculation of the speed profil.
Deviation of the speed controller.
Deviation of the velocity control unit.
Deviation of the position controller.
Deviation is formed from the actual signals (Track signals A and B) and the target position.
0RWRUFRQWUROV\VWHP3RZHUVWDJH
Here the motor current is controlled to directly affect the motor speed. The output signal of the
current controller is amplified here and fee to the 3 phase power semiconductors to generate the
AC-motor current. The current controller is a PI controller and performs the coarse positioning of
the axis, there he through its integration part most rapid to deviations may react control.
Student Guide HS-50 Advanced II 07/2002 Edition
6 Control & Communication
23
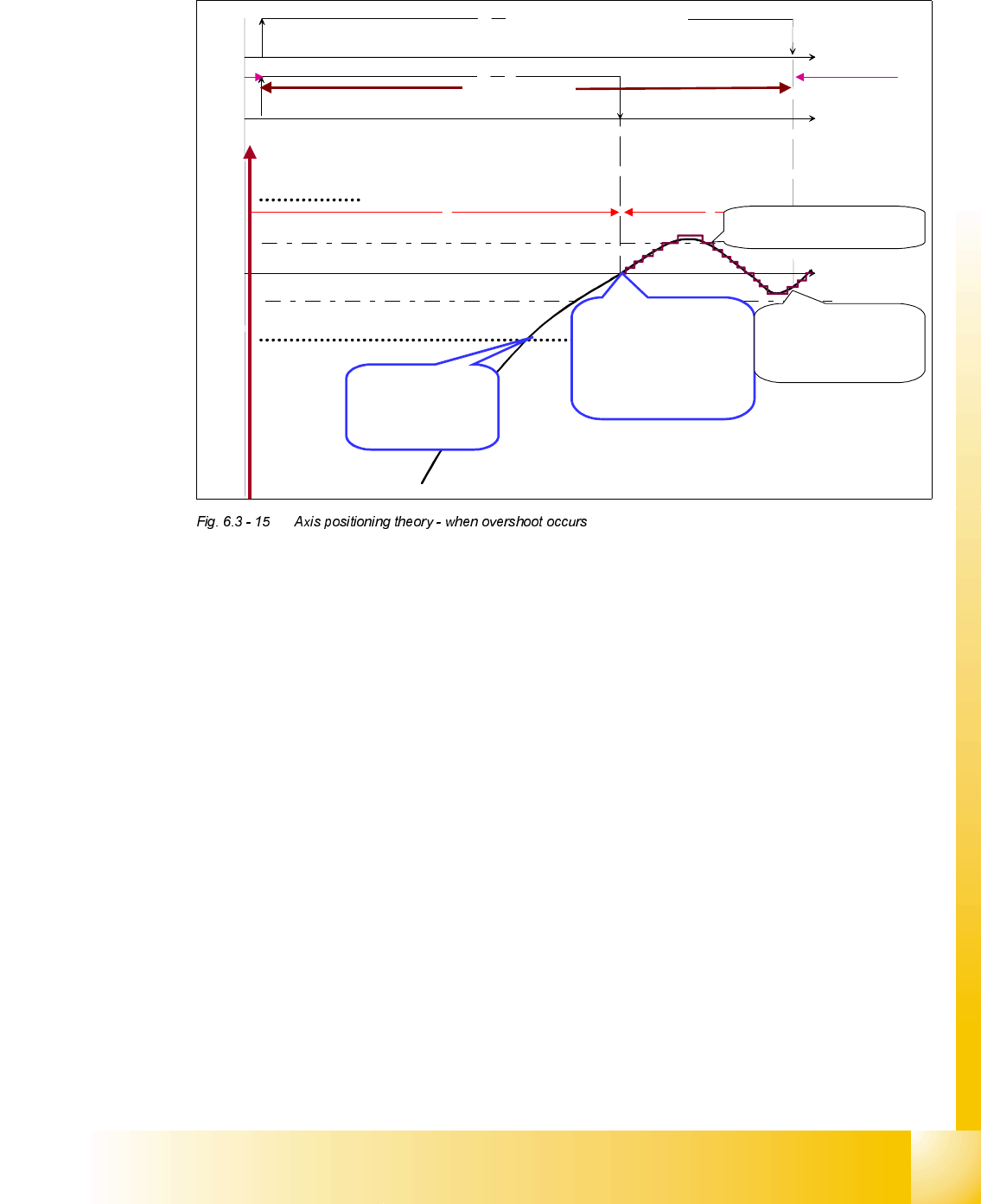
$[LV3RVLWLRQLQJ7KHRU\ZKHQ2YHUVKRRW2FFXUV
([SODQDWLRQRI7HUPV
3RVLWLRQLQJ0RGH
This means moving the axis mechanism out of the current position in a specified destination po-
sition under controlled acceleration and speed control. Here the destination position, the acceler-
ation, the deceleration and the speed can be varied.
$OORZHGGHYLDWLRQRISRVLWLRQ
The end signal is generated, when the position deviation is in the allowed range (value in
ACHS.MA, normally 13 digits).
3RVLWLRQLQJ&RUULGRU
By crossing the positioning corridor (digit value in ’mode 2’ in ACHS.MA, normally 10 digits) the
set point speed is set to zero (Vnull) and the position control is activated. This means the micro-
processor calculates the acceleration and deceleration curve to a position, which is 10 digits be-
fore the real target position.
2YHUVKRRW&RXQWHUDQG(QG6LJQDO
The Overshoot counter is activated when the axis crosses the target (setpoint) position for the first
time. You can check this overshoot because axis test box is triggered with "actual position is nom-
inal position signal". The End signal is given by the axis card to the Machine Controller once the
apex of the overshoot is within the Allowed Deviation of position. The end signal allows the ma-
chine controller to initiate the next movement or function.
Position counting
Overshoot
counting
Time
Time
Time
mechanical movement and position counting
ACTUAL-, is NOMINAL position signal
End signal
Allowed deviation of position
Allowed deviation of position
positioning
occurrence
position
controlling
X
position
Axis move up from
here with minimum
speed and with
reduced P
gain
When the mechanic move
the first time across the
target position the
“actual position is nominal
position signal” is triggered
the overshoot counter starts
The overshoot counter monito
r
a 6 digit maximum
End signal is triggered
position controlling start
s
and the next axis starts
For the P&P head is the allowed deviation of position 2 digit
Positioning
corridor
07/2002 Edition Student Guide HS-50 Advanced II
6 Control & Communication
24
3RVLWLRQ&RQWURO
Under the operational mode of position control an attempt is made to retain a programmed posi-
tion. The target (setpoint) position stored in the main memory of the microprocessor is compared
with the actual position (counter register). If a position deviation is detected (the target or setpoint
position is not equal actual position) then the servo amplifier is actuated via the V nom in such a
way that the mechanism returns back to the programmed position (target or setpoint position).
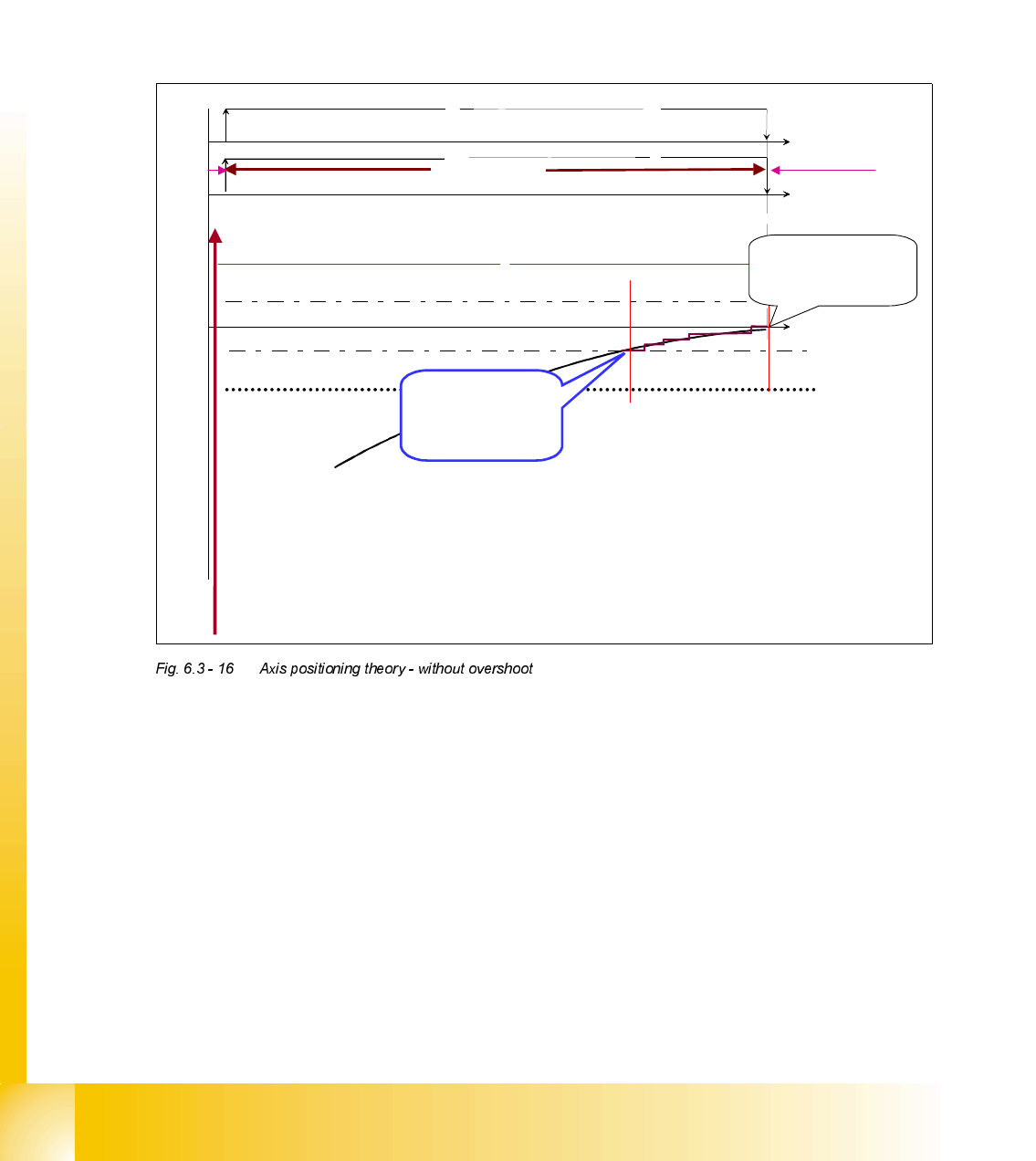
$[LV3RVLWLRQLQJ7KHRU\ZLWKRXW2YHUVKRRW
On short travel distances and at SIPLACE HS-50 X and Y axis positioning very often occurs with-
out an overshoot. The end signal is triggered 10 ms after the axis first crosses the allowed devia-
tion of position. If within this time the axis moves out of allowed position deviation the 10 ms timer
is deactivated.
ACTUAL-, is NOMINAL position signal
mechanical movement and position counting
End signal
Time
Time
Time
ACTUAL-, is NOMINAL position signal
mechanical movement and position counting
End signal
Time
Time
Time
Position counting
Allowed deviation of position
Allowed deviation of position
Time for “SSK” (10 ms)
is used for the end
signal at asymptotic
approach
positioning
occurrence
position
controlling
If there is no overshoot we get the end signal by asymptotic approach.
From here the Axis
moves with minimum
speed and with
reduced P
gain
End signal is triggered
position controlling
starts and the next axis
starts
X
position
Positioning
corridor