HS50_advance_level 2.pdf - 第244页
07/2002 Editio n Student G uide HS -50 Advanc ed II 8 Y-Axis 26 3UR[LPLW\6ZLW FK&RQQHFWRUVRQW KH;<'LVWU LEXWRU+6 Note: Default Jumpe r settin gs ! .(< ;; = Proxim ity s witch …
Student Guide HS-50 Advanced II 07/2002 Edition
8 Y-Axis
25
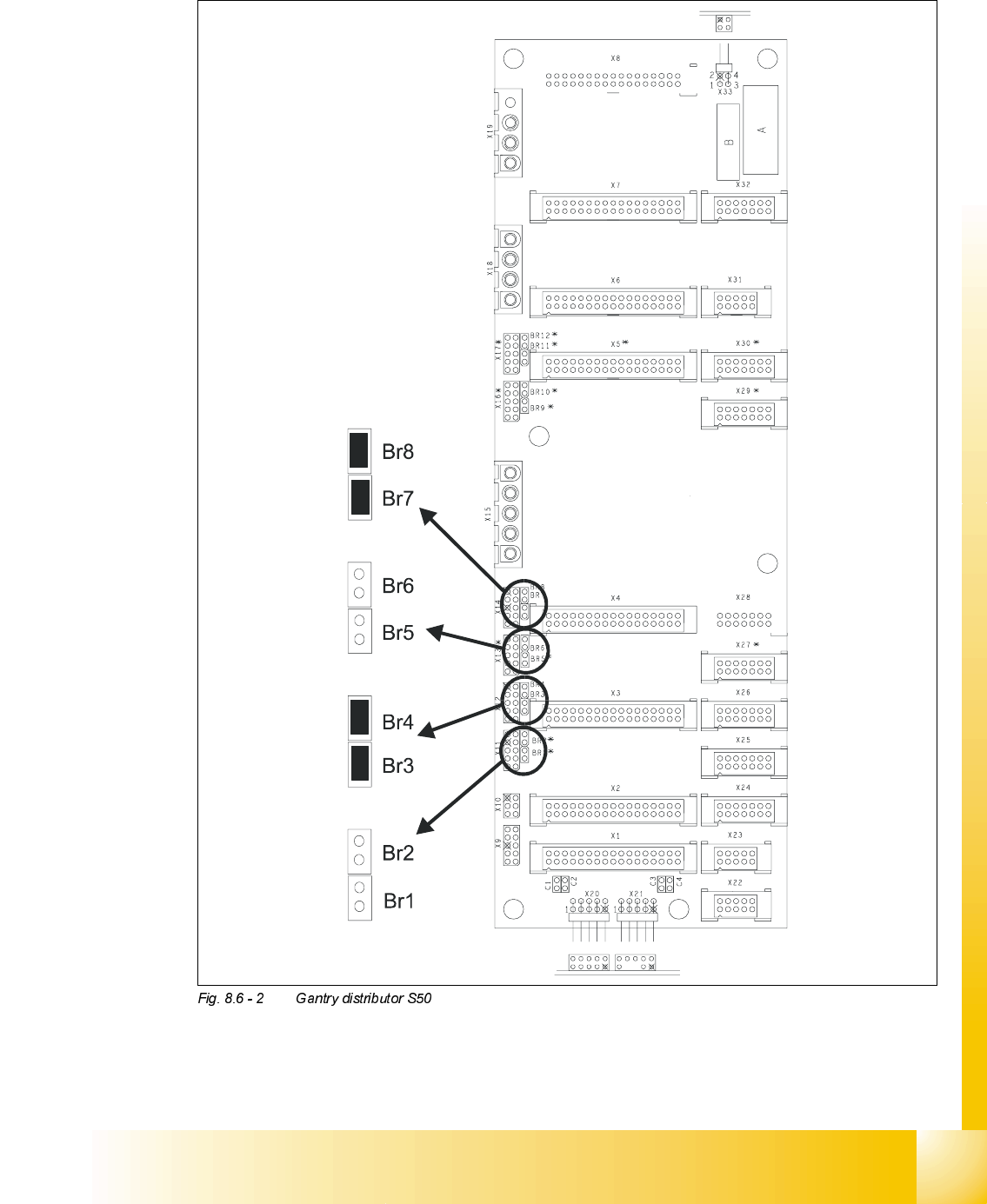
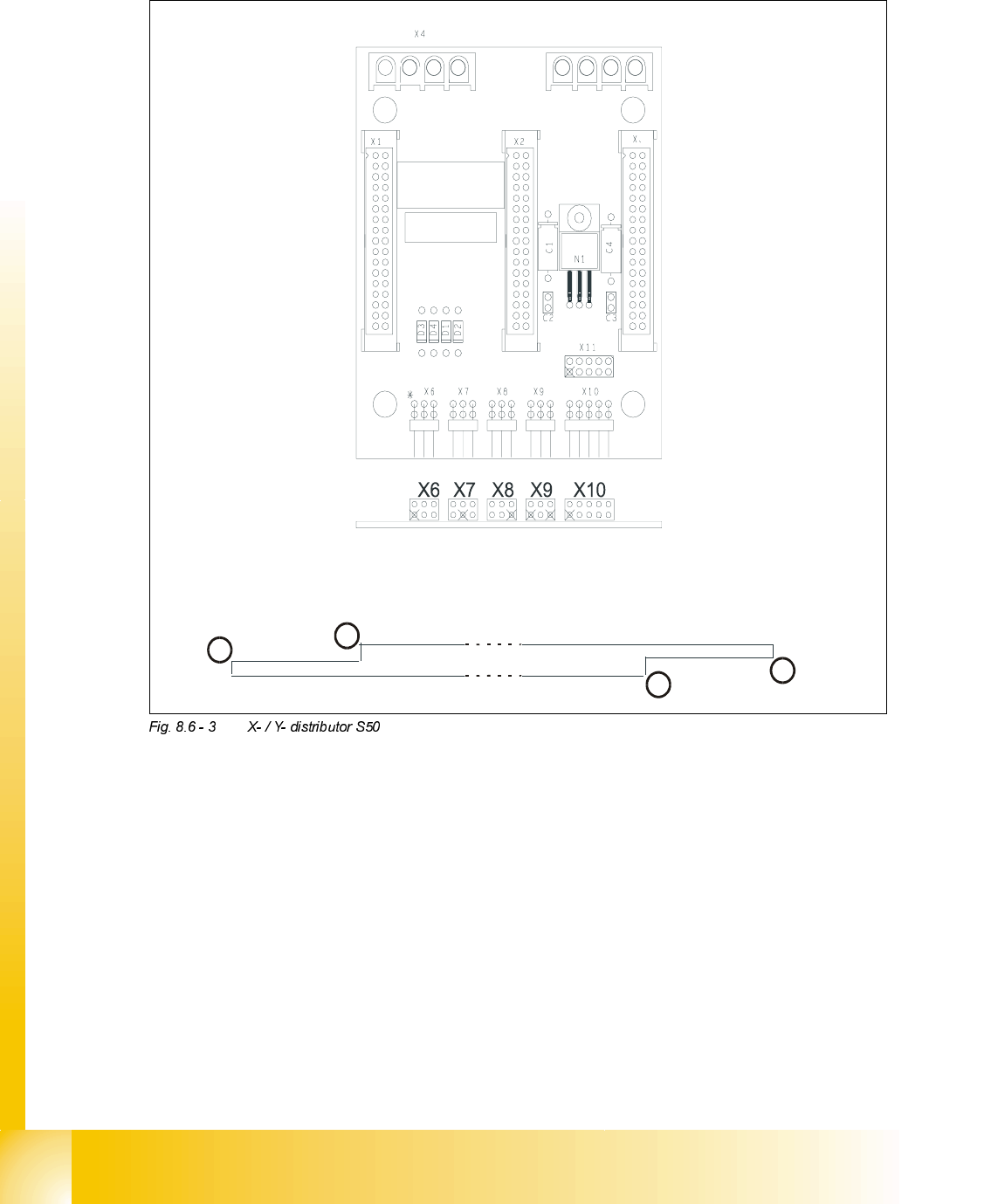
-XPSHU6HWWLQJV*DQWU\'LVWULEXWRU6
07/2002 Edition Student Guide HS-50 Advanced II
8 Y-Axis
26
3UR[LPLW\6ZLWFK&RQQHFWRUVRQWKH;<'LVWULEXWRU+6
Note: Default Jumper settings !
.(<
;; =Proximity switch y-axis
; = Distance sensor
; = Track signals y-axis
(1) Switch point end position
(2) Switch point reference
(3) Switch point reference
(4) Switch point end position
6FKDOWSXQNWH5HIHUHQ]SXQNWXQG(QGODJHQlKHUXQJVVFKDOWHU
VZLWFKSRLQWVUHIHUHQFHSRLQWDQGHQGSRVLWLRQOLPLWVZLWFK
1
2
3
4
Student Guide HS-50 Advanced II 07/2002 Edition
8 Y-Axis
27
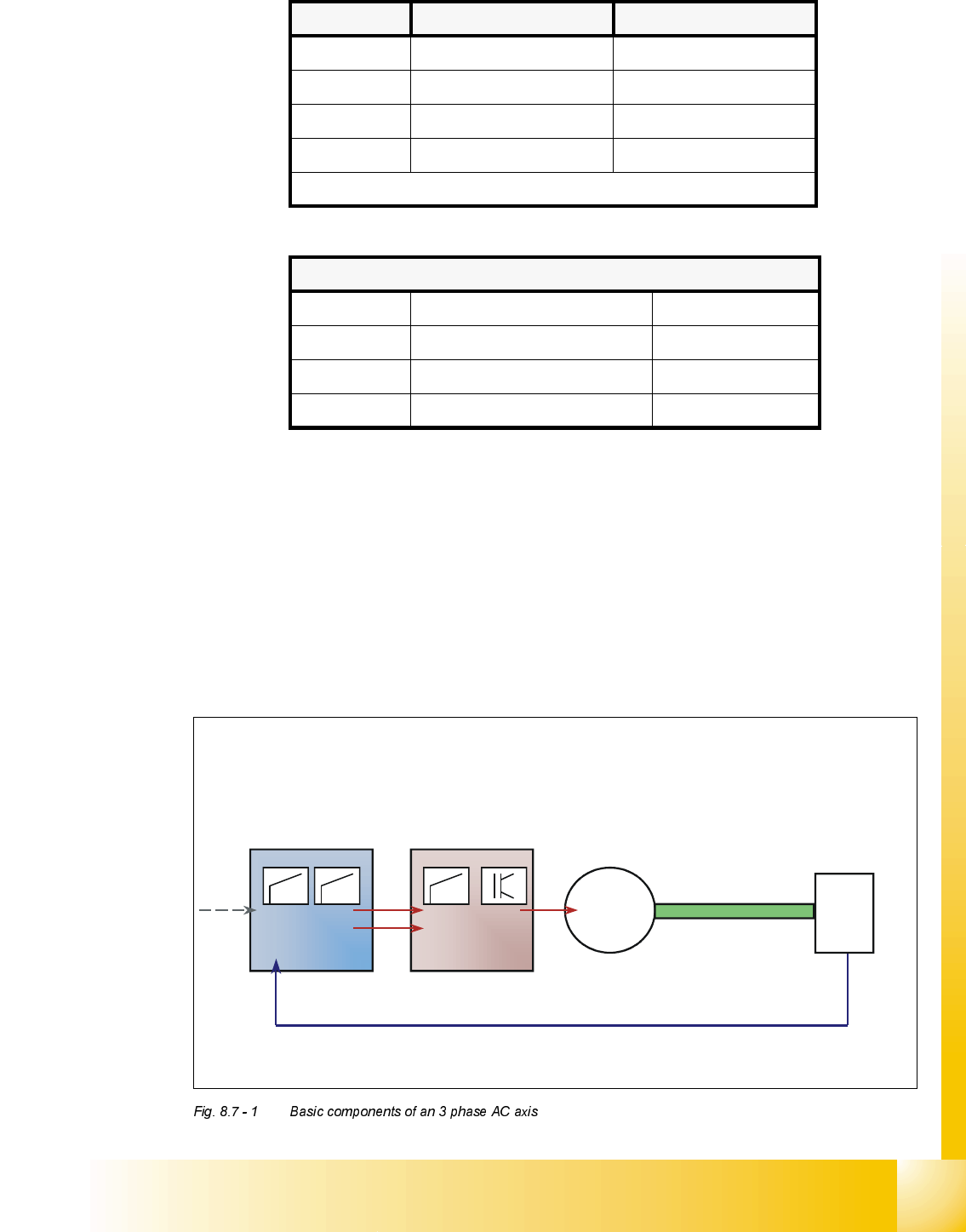
2YHUYLHZRI<D[LVFRQWUROV\VWHP
%DVLF&RPSRQHQWVRIWKH<D[LVGULYH
An axis controller, a servo amplifier and a motor generates all Y axis movements in the machine
controlled by the track signals.
3UR[LPLW\VZLWFK; 3UR[LPLW\VZLWFK;
gantry 1 top bottom
gantry 2 bottom top
gantry 3 top bottom
gantry 4 bottom top
distance sensor X9 only with gantry 1 and 3
6ZLWFKSRLQWV5HIHUHQFHHQGSRVLWLRQ
1 switch point: end position gantry 2 , 4
2 switch point: reference gantry 2, 4
3 switch point: reference gantry 1, 3
4 switch point: end position gantry 1, 3
A axis controller,a servo amplifier and a axis drive generate all movements in the machine.
Digital axis
controller
Analog servo
amplifier
Axis drive 3 phase AC
digital position
detection with feed
back loop
SIPLACE HS50-machines have on each gantry three of this 3 phase AC - axes. (X-Y-Star)
M
3~
Track signals
Incremental
encoder