HS50_advance_level 2.pdf - 第354页
S tudent Guide HS-50 Ad vanced II 12 S pecial handlin g for th e Z-axis Edition 0 7/2002 10 7 UDYHO SURIL OHVLQGHW DLO 3LFNLQJXS DF RPSRQHQW LQ6 W DQGDUG PRGH 6LJQD OVIURPWRS WRERWWRP …
Student Guide HS-50 Advanced II
Edition 07/2002 12 Special handling for the Z-axis
9
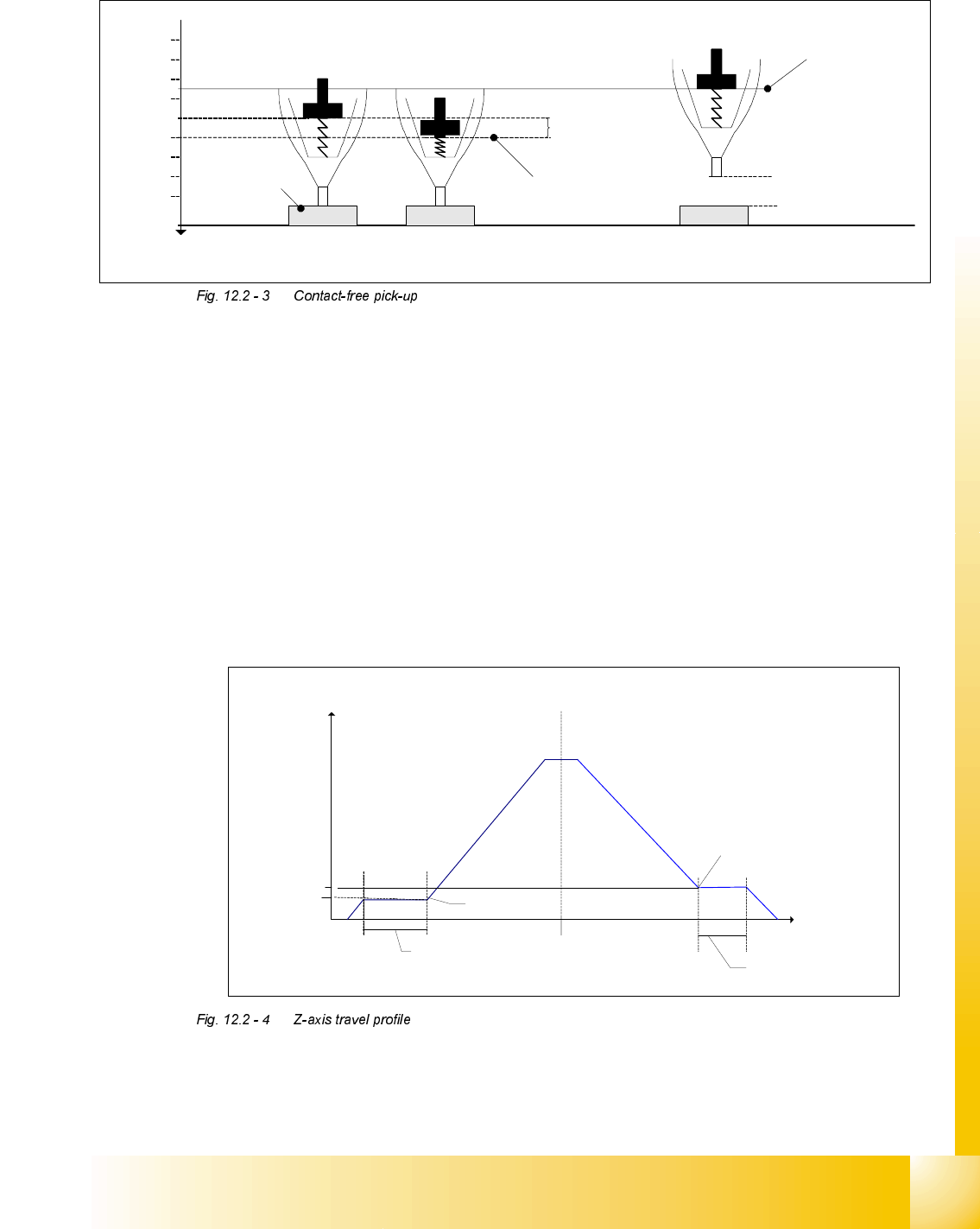
7UDYHOSURILOHRIWKH=D[LV
=D[LVWUDYHOSURILOHGRZQZDUGVRQSLFNXS
0RGHNormal downward motion with light barrier at bottom
0RGHCalibration mode for pick-up without contact
=D[LVWUDYHOSURILOHXSZDUGVRQSLFNXS
0RGHStandard mode
0RGHCreep mode, i.e. the Z-axis moves up slowly the first few millimeters.
0RGHCreep mode, i.e. the Z-axis moves up slowly the first two millimeters.
The figure shows the travel profile for the Z-axis when moving upwards. Using the parameters
V
Start
and S
Start
, a creep path can be set up in the acceleration phase, and with the parameters
V
End
and S
End
in the deceleration phase.
Spring travel
approx.
200 µm
Height
clearance
Pick-up position
Pick-up position
with height
clearance
Pick-up at height
clearance level
Normal pick-up
with light barrier
z
400 µm
200 µm
600 µm
800 µm
1000 µm
1200 µm
1400 µm
1600 µm
1800 µm
Component
Spring travel
approx.
200 µm
Height
clearance
Pick-up position
Pick-up position
with height
clearance
Pick-up at height
clearance level
Normal pick-up
with light barrier
z
400 µm
200 µm
600 µm
800 µm
1000 µm
1200 µm
1400 µm
1600 µm
1800 µm
Component
Z-axis
s
[µm]
v
[m/s]
Acceleration phase Deceleration phase
Creep path
s
Start
V
Start
Creep path
s
End
V
End
V
End
V
Start
Student Guide HS-50 Advanced II
12 Special handling for the Z-axis Edition 07/2002
10
7UDYHOSURILOHVLQGHWDLO
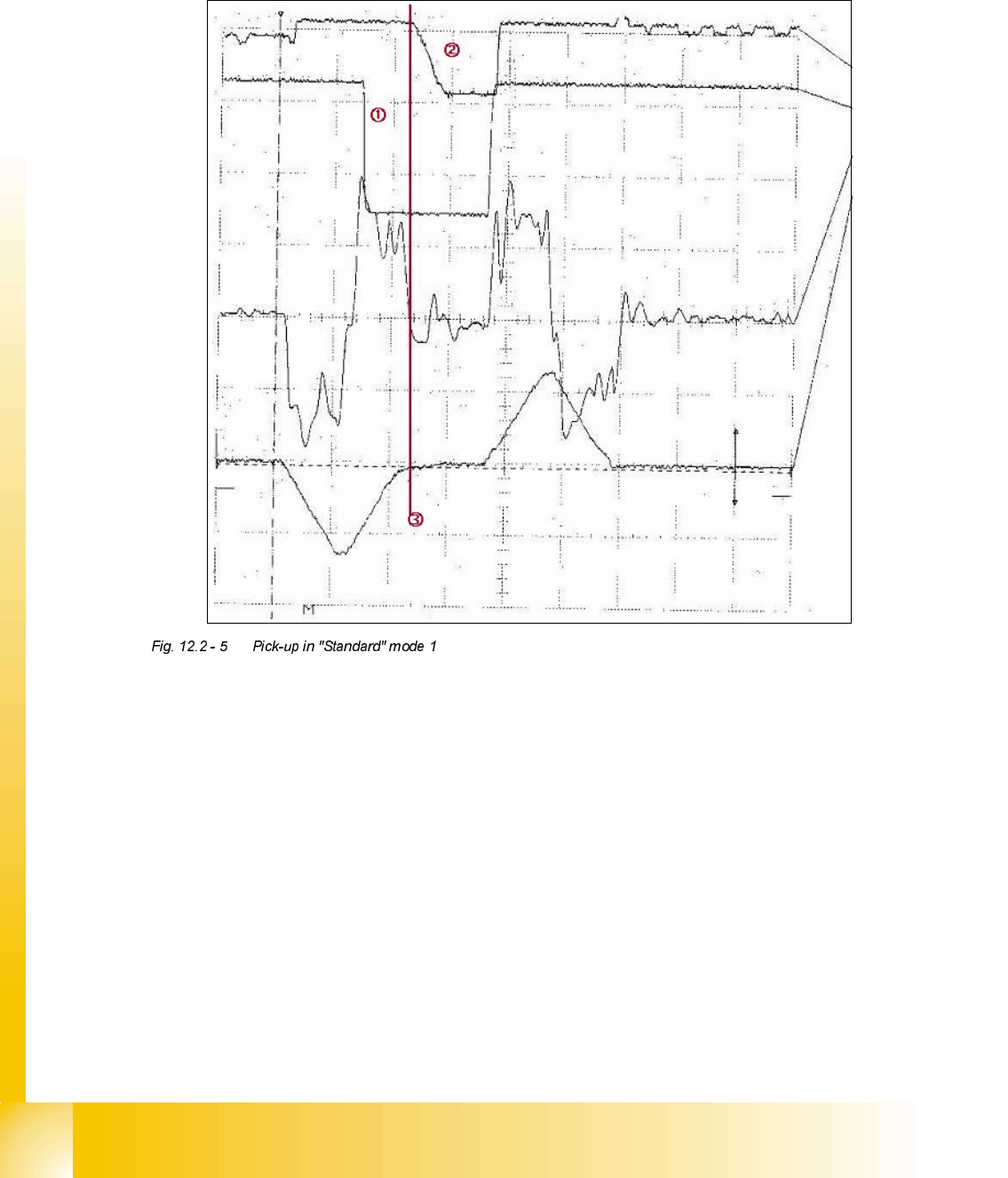
3LFNLQJXSDFRPSRQHQWLQ6WDQGDUGPRGH
6LJQDOVIURPWRSWRERWWRP
Positional deviation: 1V 10 ms
Force signal: 5 V 10 ms
Iactual: 5 V 10 ms
Vtarget: 5 V 10 ms
The acceleration for the Z-axis is reduced here to 98.2%. The result is that the “special mode 44
digits slow” is not switched on.
Reduction of force after braking has begun in order to pick up the component from the feeder
securely and without damaging it.
From 6 to 8 digits are printed on the component so that the nozzle lands properly on the
component.
End signal for " Downwards"
Student Guide HS-50 Advanced II
Edition 07/2002 12 Special handling for the Z-axis
11
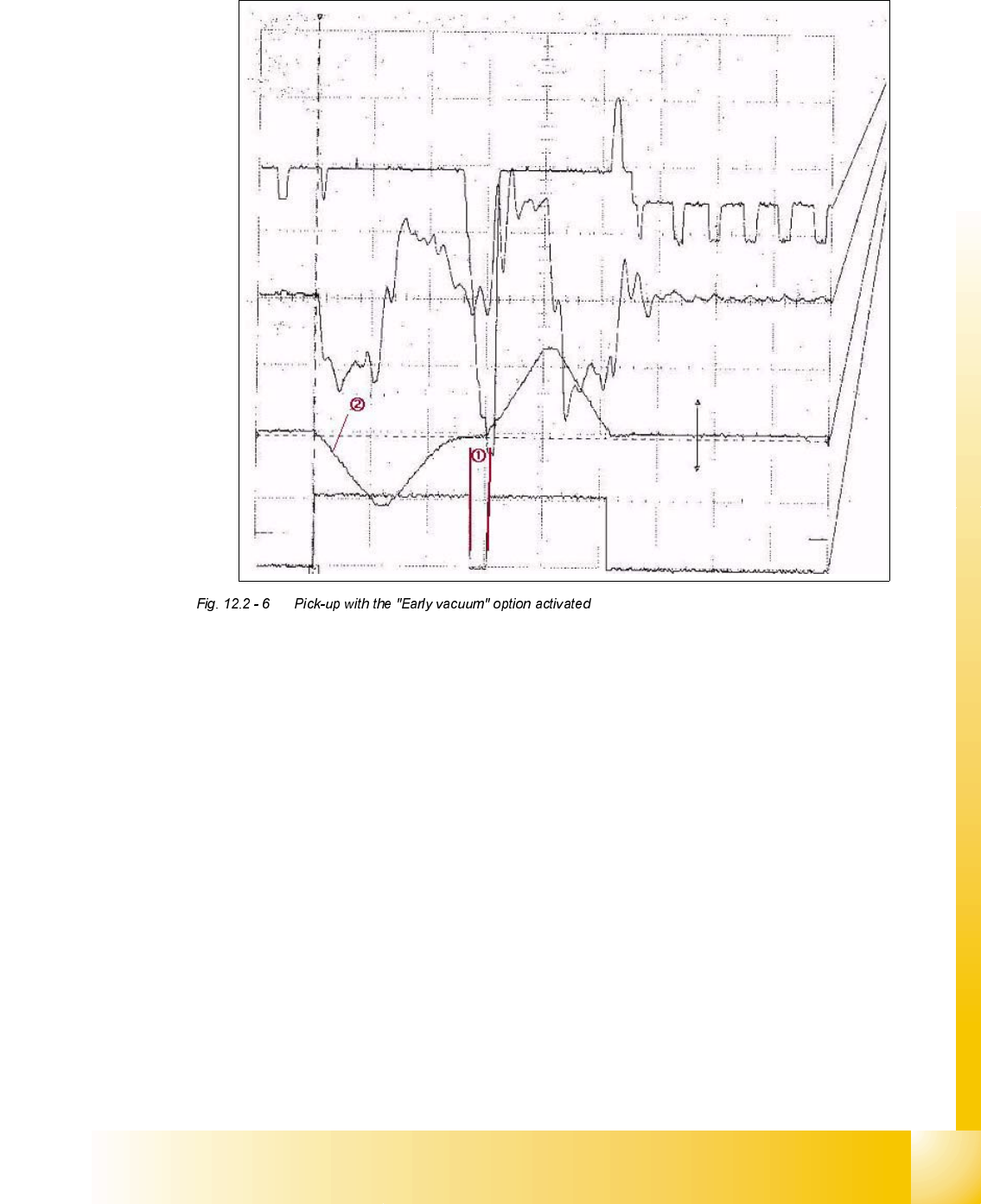
3LFNXSZLWKWKH(DUO\YDFXXPRSWLRQDFWLYDWHG
6LJQDOVIURPWRSWRERWWRP
Positional deviation: 200 mV 10 ms
Iactual: 5 V 10 ms
Vtarget: 5 V 10 ms
End signal: 5 V 10 ms
The "Early vacuum" option was activated here during the pick-up operation (see the package form
description),
recognizable by the short "stop time" on the component.
"Early vacuum" switched on here
The "Early vacuum" option is activated for package forms that are picked up using small nozzles.
The result is that while the nozzle moves downwards, a vacuum is created in the air system of the
placement head. This means that the component remains securely fixed to the nozzle when it is
moved upwards. The pick-up procedure is shortened.
Disadvantage: The placement head gets dirty more quickly when large nozzles are used because
air is sucked in when the nozzle is open and the effect of the vacuum through the large nozzle
opening is questionable.