HS50_advance_level 2.pdf - 第357页
S tudent Guide HS-50 Adva nced II Editio n 07/200 2 12 S pecial handlin g for th e Z-axis 13 3 LFNX SLQPR GH& UHHS VWDUW 6LJ QDOVIURP WRSWR ERWWRP Positio nal de viation: 200 m V 20 ms F…
Student Guide HS-50 Advanced II
12 Special handling for the Z-axis Edition 07/2002
12
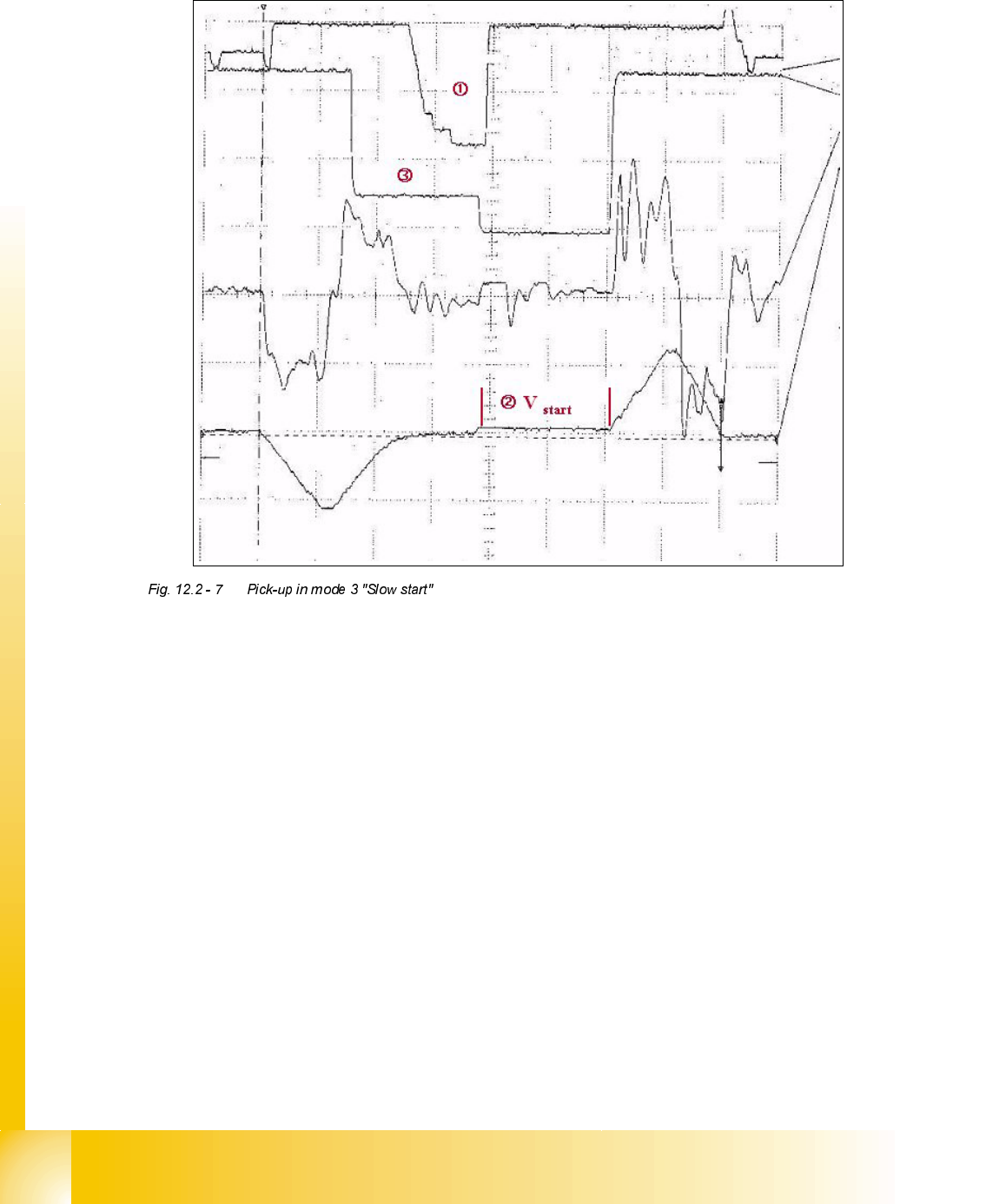
3LFNXSLQPRGH6ORZVWDUW
6LJQDOVIURPWRSWRERWWRP
Positional deviation: 200 mV 10 ms
Force signal: 5 V 10 ms
Vtarget: 5 V 10 ms
End signal: 5 V 10 ms
"Standard" mode 1 was used for pick-up here (see the package form description).
Mode 3 "Slow start" was selected for the initial motion upwards in order to securely hold the
component on the nozzle,
recognizable by the long "start time" when the nozzle moves upwards.
Reduction of force after braking has begun in order to pick up the component from the feeder
without damaging it.
This mode is used for exotic and heavy package forms so that they can be picked up securely
from the feeder (also suitable for use with narrow tape pockets). This mode can be selected
regardless of the nozzle size. In all software versions up to 502 this mode corresponded to a
special mode for the Z-axis with an acceleration value of 98.2 %. An initial path (e.g. 44 digits) is
traveled at the start speed.
Disadvantage: The pick-up operation takes about 20 ms longer.
Student Guide HS-50 Advanced II
Edition 07/2002 12 Special handling for the Z-axis
13
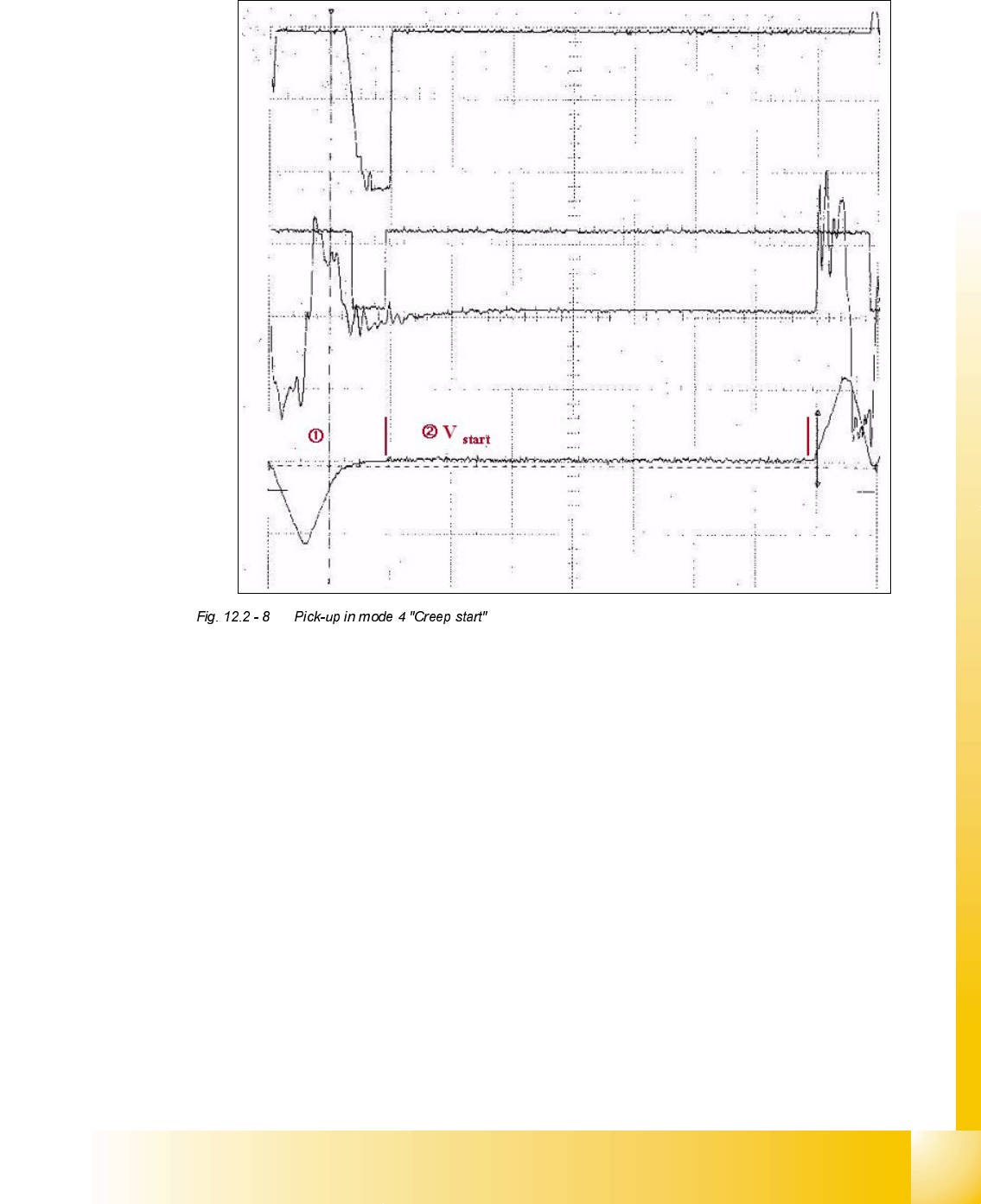
3LFNXSLQPRGH&UHHSVWDUW
6LJQDOVIURPWRSWRERWWRP
Positional deviation: 200 mV 20 ms
Force signal: 5 V 20 ms
Iactual: 5 V 20 ms
Vtarget: 5 V 20 ms
"Standard" mode 1 was used for pick-up here (see the package form description).
Mode 4 "Creep start" was selected for the initial motion upwards in order to securely hold the
component on the nozzle,
recognizable by the long "start time" when the nozzle moves upwards.
Reduction of force after braking has begun in order to pick up the component from the feeder
without damaging it.
Mode 4 "Creep start" is selected in the package form description when the components cannot be
securely picked up from the feeder. This mode can be selected regardless of the nozzle size. As
already pointed out on the line computer user interface, the pick-up operation takes significantly
longer than mode 3 "Slow start".
Disadvantage: The pick-up operation takes about 120 ms longer.
Student Guide HS-50 Advanced II
12 Special handling for the Z-axis Edition 07/2002
14
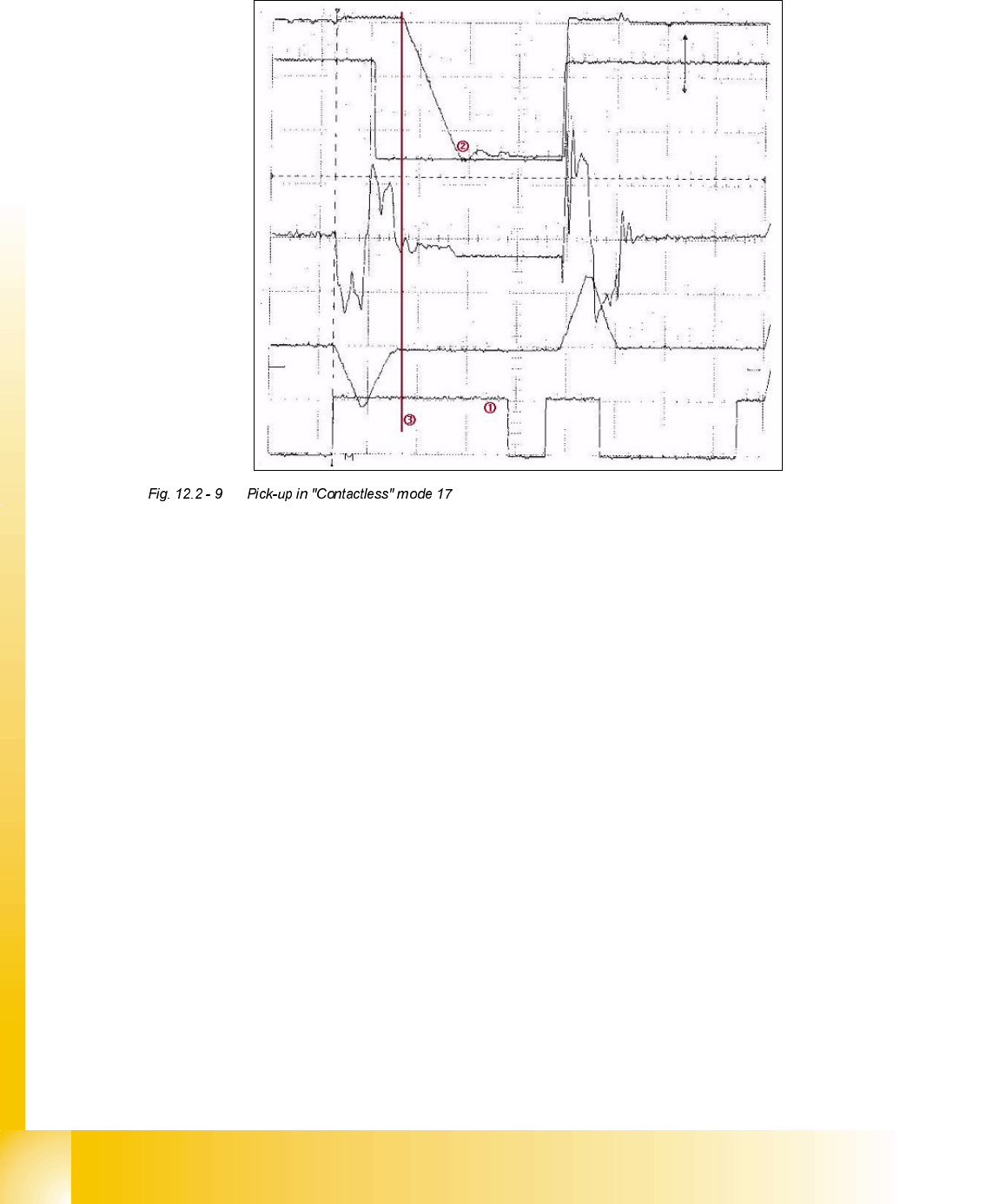
3LFNXSLQPRGH&RQWDFWOHVVDQGPRGH&DOLEUDWHSLFNXSKHLJKW
6LJQDOVIURPWRSWRERWWRP
Positional deviation: 2 V 20 ms
Force signal: 5 V 20 ms
Iactual: 5 V 20 ms
Vtarget: 5 V 20 ms
Calibrate the end signal from the oscilloscope memory
"Contactless" mode 17 was used for pick-up here.
With the "Pick-up without contact" option activated, the height was calibrated during the first pick-
up operation
by pressing the component onto the PCB using force level 5 (end signal delayed).
The sleeve spring was complete compressed,
this results in a positional deviation of about 55 digits after the
bottom light barrier has responded.
"Contactless" mode 17 is selected for picking up 0201 package forms (0.5 x 0.25 mm) so that they
can be securely picked up from the feeder (you can try to place package forms up to 0603).
In this mode the Z-axis is positioned at the absolute pick-up height (= calibrated height - 55 digits).
After 4 pick-up errors the pick-up height is recalibrated just like during the first pick-up operation
with the "Pick-up without contact" option activated. Mode 18 "Calibrate pick-up height" cannot be
programmed on the LC.