HS50_advance_level 2.pdf - 第369页
S tudent Guide HS-50 Adva nced II Editio n 07/200 2 12 S pecial handlin g for th e Z-axis 25 $ IW HUSODFLQJ LQPRGH6ORZ VW DUW 6LJ QDOVIURP WRSWR ERWWRP Positio nal de viation: 2 00 mV 10 ms…
Student Guide HS-50 Advanced II
12 Special handling for the Z-axis Edition 07/2002
24
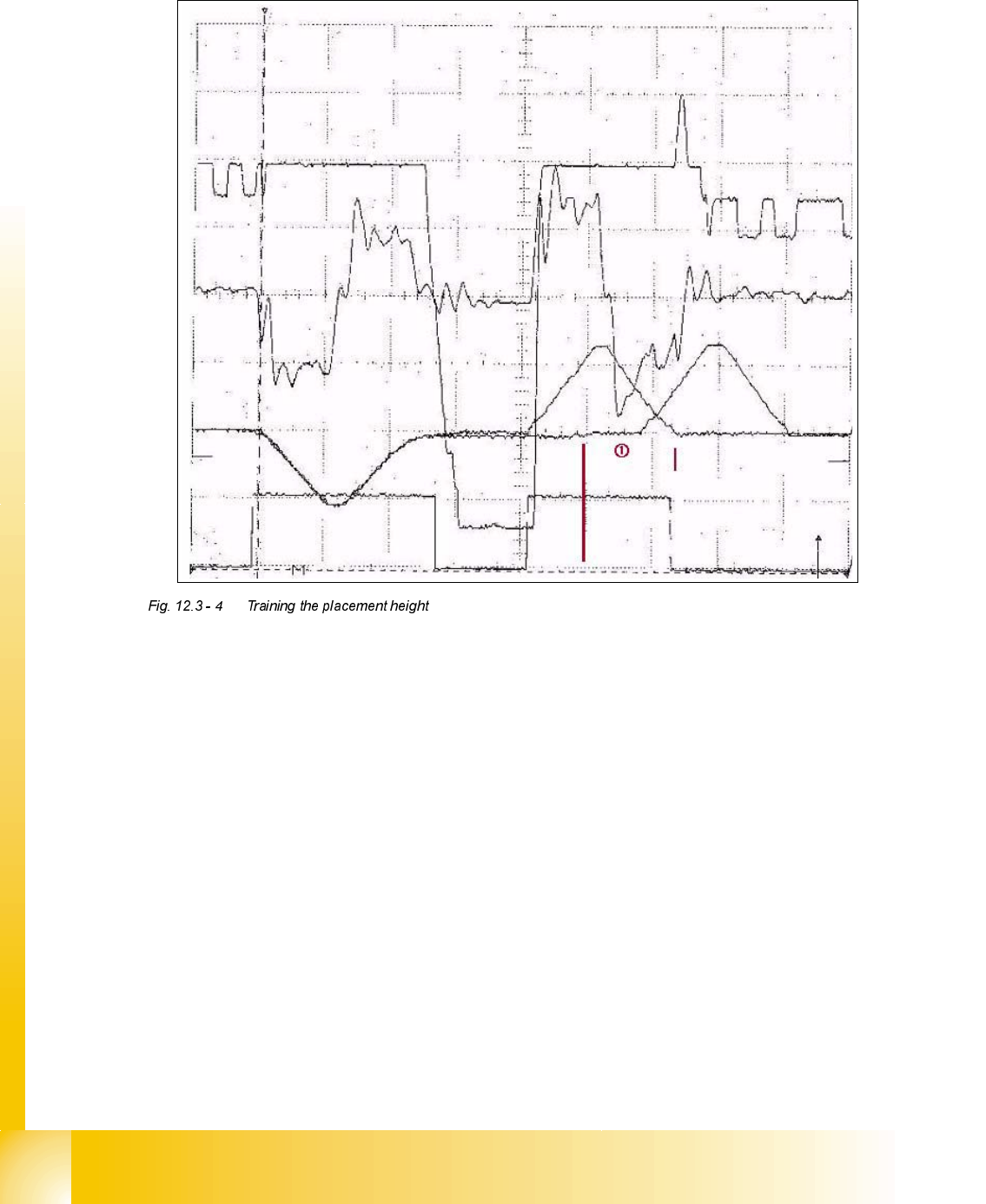
7UDLQLQJWKHSODFHPHQWKHLJKW
6LJQDOVIURPWRSWRERWWRP
Positional deviation: 200 mV 10 ms
Iactual: 5 V 10 ms
Vtarget from the memory of the oscilloscope (long Vtarget signal)
Vtarget: 5 V 10 ms
End signal: 5 V 10 ms
The curve stored for Vtarget shows the first placement operation on the first circuit board. The
other 4 signals show the placement operation for the same component on the 12th circuit board.
This means that the placement operation on the 12th circuit board is about 18 ms faster.
The pick-up height is trained for every placement position on all circuit boards.
Student Guide HS-50 Advanced II
Edition 07/2002 12 Special handling for the Z-axis
25
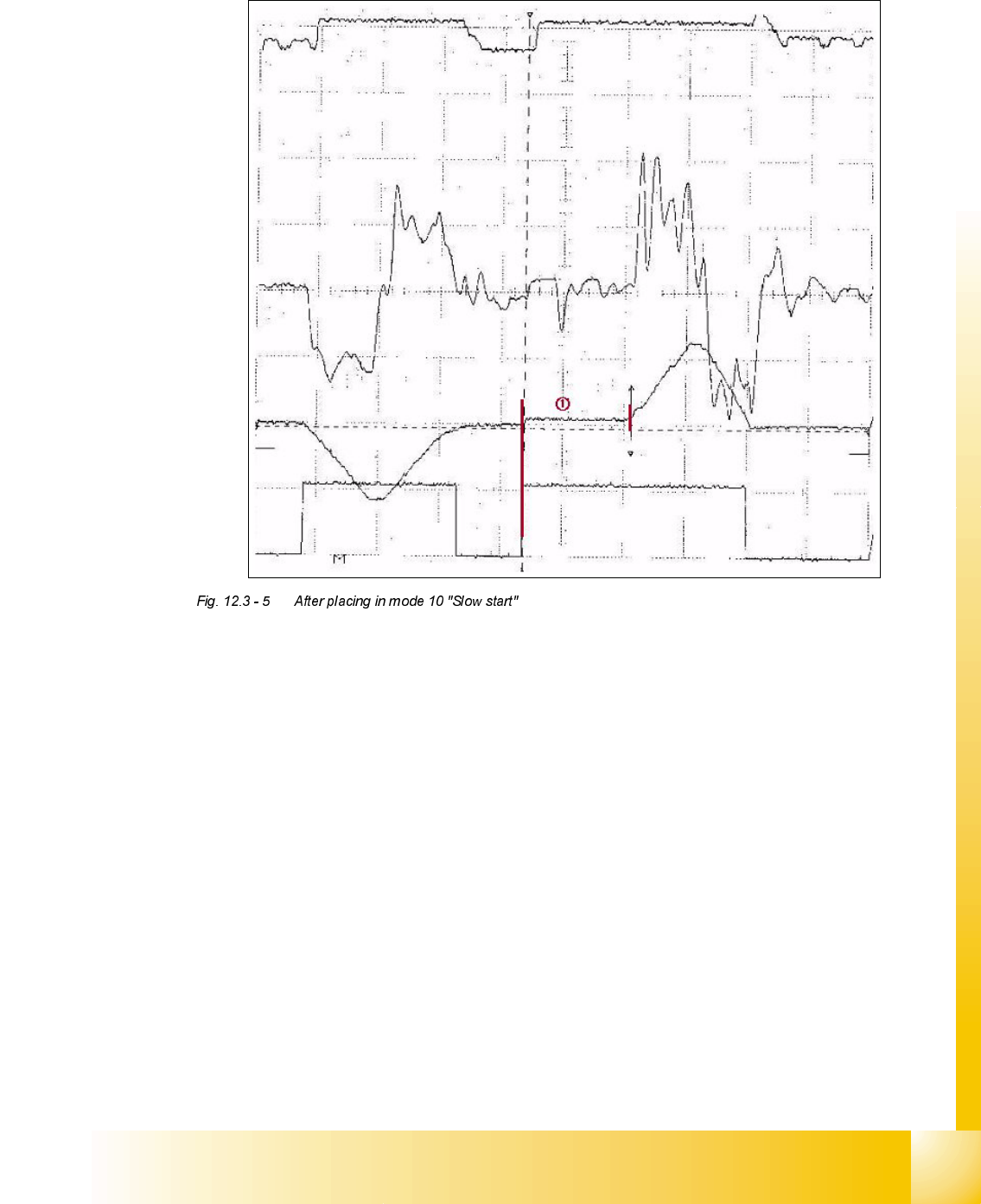
$IWHUSODFLQJLQPRGH6ORZVWDUW
6LJQDOVIURPWRSWRERWWRP
Positional deviation: 200 mV 10 ms
Iactual: 5 V 10 ms
Vtarget: 5 V 10 ms
End signal: 5 V 10 ms
Normal placement with light barriers. After switching on the forced air it takes about 20 ms until
the Z-axis accelerates up and away from the component.
Disadvantage: The placement operation takes about 20 ms longer.
This is a new programming capability. It corresponds to mode 3 "Slow start" when picking up a
component. Mode 10 "Slow start" can be selected so that the components remain securely on the
circuit board. In doing so, 44 digits (= 1mm) are traveled at the start speed. After that, it accelerates
and follows the normal speed profile.
Student Guide HS-50 Advanced II
12 Special handling for the Z-axis Edition 07/2002
26
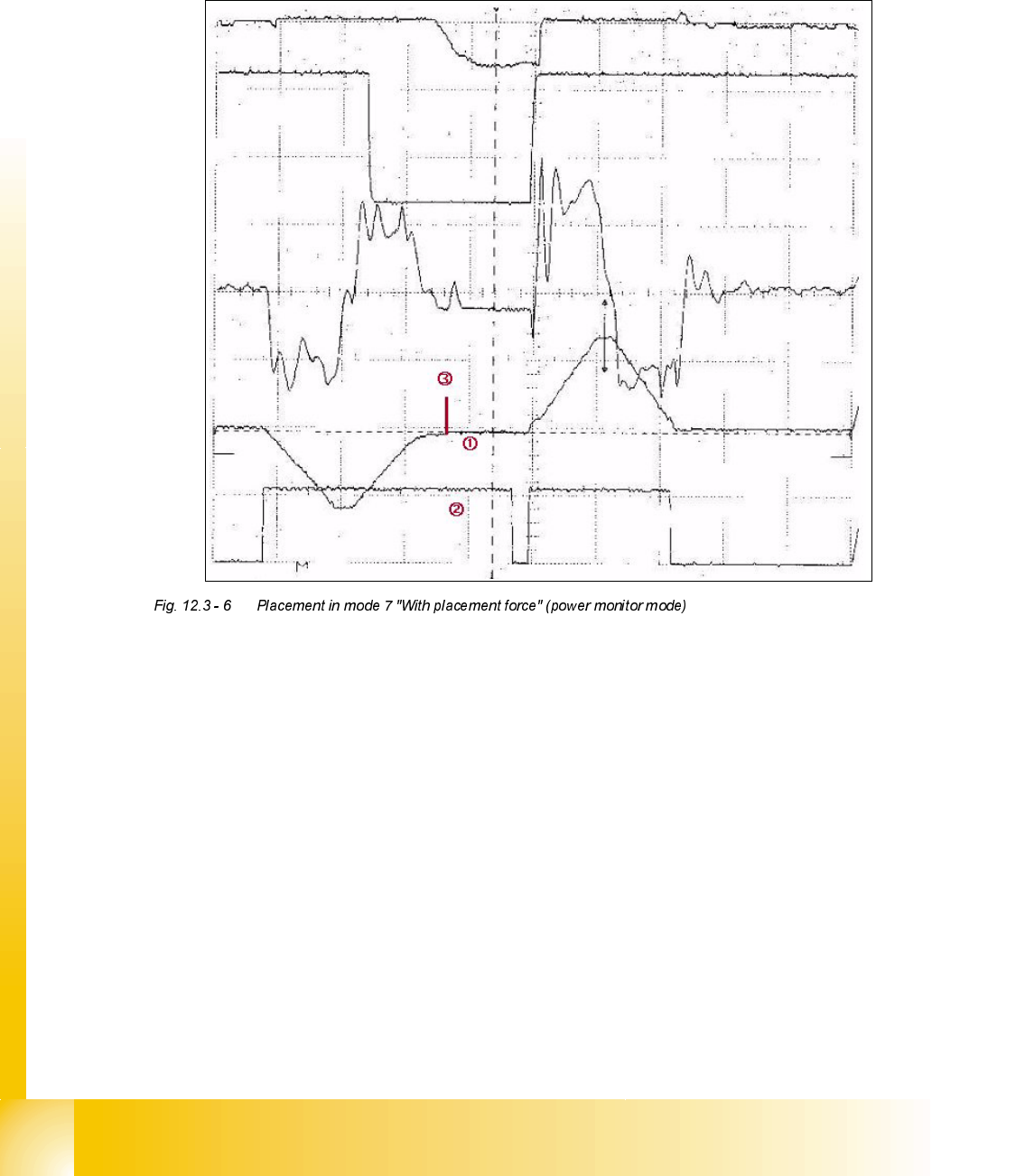
3ODFHPHQWLQPRGH:LWKSODFHPHQWIRUFHSRZHUPRQLWRUPRGH
The component is to be placed on the circuit board with more than 2 N of placement force. The
mode for the downward motion and the value for the placement force must always be set. The
placement operation is delayed until the current in the servo-amplifier has built up.
6LJQDOVIURPWRSWRERWWRP Placement force of 3N
Positional deviation: 200 mV 10 ms
Force signal: 5 V 10 ms
Iactual: 5 V 10 ms
Vtarget: 5 V 10 ms
End signal from the oscilloscope memory
Mode 2 "With placement force" (power monitor mode) was used for placement in order to increase
the placement force to 3 N.
The end signal is delayed until the corresponding current in the servo-amplifier has built up.
Forced air is switched on during this extended positioning time.
Activation time for the bottom light barrier