HS50_advance_level 2.pdf - 第396页
07/2002 Editio n Student G uide HS -50 Advanc ed II 14 Conveyor System 22 ,QVW DO OLQJWKH* HDUHG0RWRURIW KH3&%&RQYH\RU'ULYH CAUTION O The toothe d belt must not be stretched or kinked. 14 ➠…
Student Guide HS-50 Advanced II 07/2002 Edition
14 Conveyor System
21
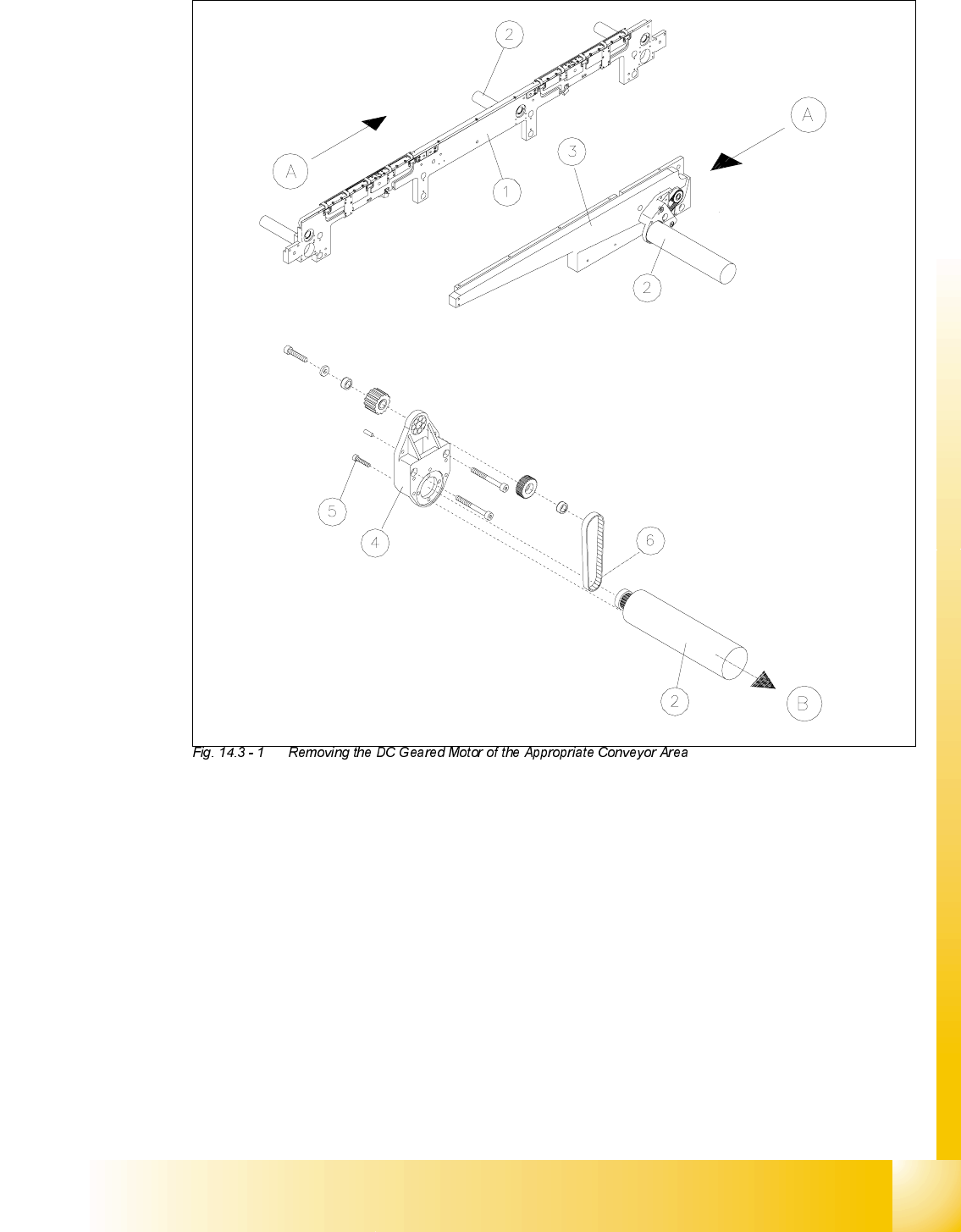
Key to
A) PCB transport direction B) Direction in which d.c. geared motor is
removed
1) Fixed conveyor side (placement area 1, 3;
intermediate conveyor; placement area 2,
4)
Set up at input in a like manner.
2) DC geared motor for conveyor belt drive
3) Fixed conveyor side of the output 4) Motor mount assembly, fastening:
Two hex. socket head cap screw M4 x 20
5) Fastening screws for DC geared motor:
Four hex. socket head cap screw M3 x 10
6) Toothed belt Synchroflex
(do not kink or stretch !)
07/2002 Edition Student Guide HS-50 Advanced II
14 Conveyor System
22
,QVWDOOLQJWKH*HDUHG0RWRURIWKH3&%&RQYH\RU'ULYH
CAUTION O
The toothed belt must not be stretched or kinked. 14
➠ Install the new d.c. geared motor in the reverse order to that described in section 14.3.1.1.
The HQWLUHZLGWK of the toothed belt must engage at the top and bottom synchronizing disk.
➠ Fasten the d.c. geared motor with the four M3 hexagonal socket head cap screws (see -> 5).
➠ Put the cable shoes on the motor terminals (+/-) in the correct polarity (direction of rotation!).
➠ Use the two heat-shrinkable sleeve rings to hold the cable to the circumference of the d.c.
geared motor.
➠ Install the sonar proximity switch mount (incl. sensor head) back on the motor mount (see ->
20).
➠ Perform the )LQDOVWHSVLQFOXGLQJIXQFWLRQFKHFN (see section 14.4).
NOTE:
After the gear motor has been installed, you must make certain that the direction of rotation and
the conveyor speed are correct (motor voltage). Proceed as stipulated in "Setting Instructions for
HS-50". 14
5HSODFLQJWKH7RRWKHG%HOWRIWKH3&%&RQYH\RU'ULYH
The following instructions apply for all 5 conveyor areas of conveyors 1 and 2. 14
NOTE
For this work the sonar proximity switch mount incl. sensor on the input and intermediate conveyor
must be removed and subsequently re-installed. During this process, the connecting cables are
not to be kinked or bent sharply. Carefully set the mount incl. sonar proximity switch down on the
machine base. 14
5HPRYDO7RRWKHG%HOWIRU3&%&RQYH\RU'ULYH
➠ For the removal from PCB conveyor 1, when dual conveyor involved:
Move the conveyor 1 only so far apart that the exterior of the movable conveyor assembly is
still sufficiently accessible to loosen the screws fastening the end shield (see -> 5).
➠ )RUWKHUHPRYDOIURPWKHVLQJOHFRQYH\RU Move the conveyor to PD[LPXPwidth.
➠ Move the Y-gantries into the area outside the PCB conveyor.
➠ Turn off the machine at the main switch and disconnect the machine from the mains.
➠ Conscientiously secure the machine against being turned back on during the servicing.
Student Guide HS-50 Advanced II 07/2002 Edition
14 Conveyor System
23
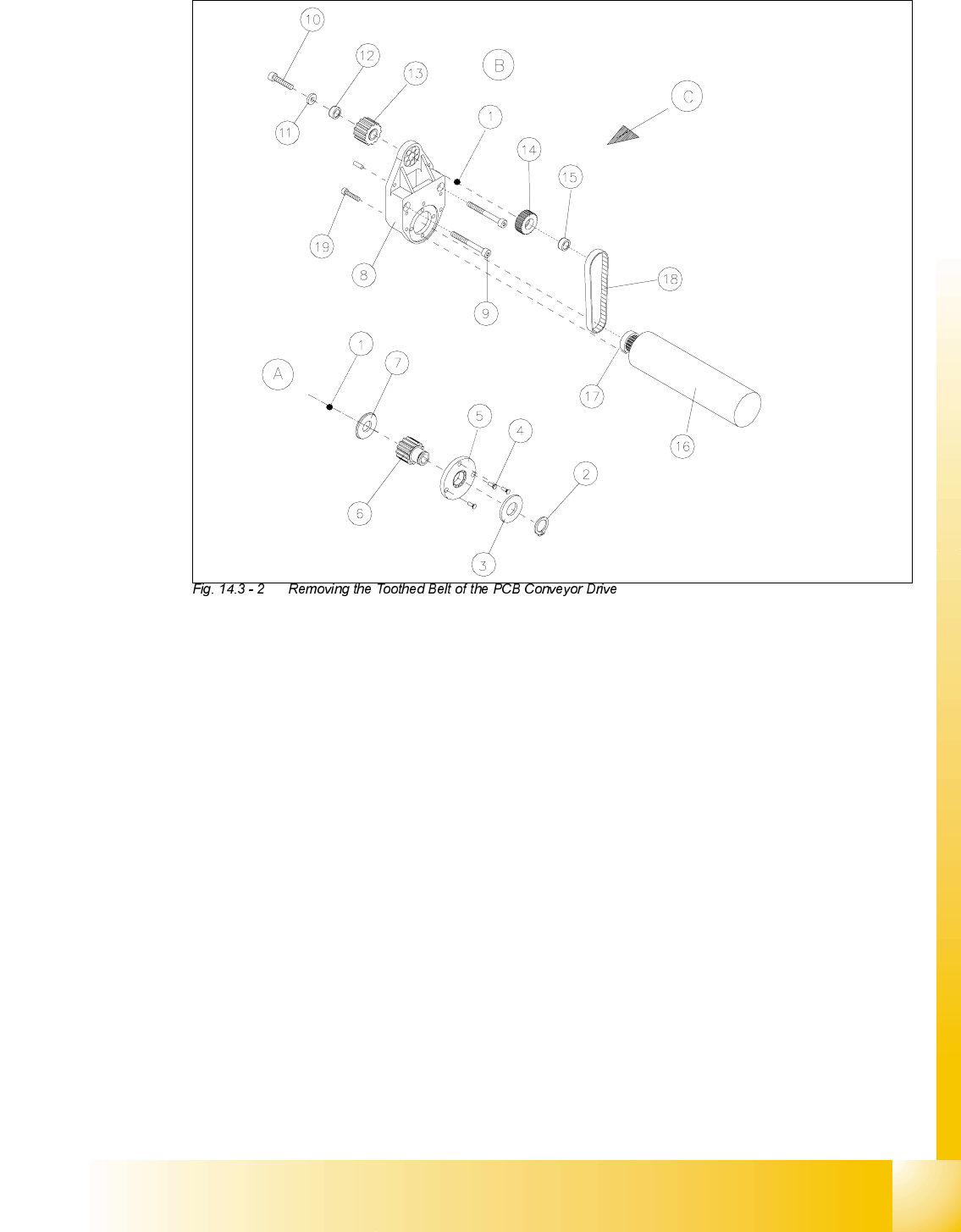
Key to
A) Layout on the movable side of the conveyor
-XVWundo the screws fastening the end
shield !
B) Layout on the fixed side of the conveyor
C) PCB transport direction
1) Hexagonal drive shaft 2) Retaining ring (is not removed)
3) Disk (is not removed) 4) 3 slotted screws M2 x 5
5) End shield 6) Synchronizing disk
7) Disk 8) Motor mount assembly
9) Screws fastening the motor mount: parallel
pin, 2 hex socket head cap screws M4 x
20,
10) Screw fastening the drive shaft:
hexagonal socket head cap screw M4 x 10
11) Pressure disk 12) Annular spring
13) Synchronizing disk (toothed belt for conv.) 14) Synchronizing disk (toothed belt for drive)
15) Annular spring (Tension element) 16) DC geared motor
17) Synchronizing disk 18) Toothed belt Synchroflex 6 T2.5/177.5
19) Screws to fasten geared motor
4 hex socket head cap screws M3 x 10