OM-1682-001_w.pdf - 第26页
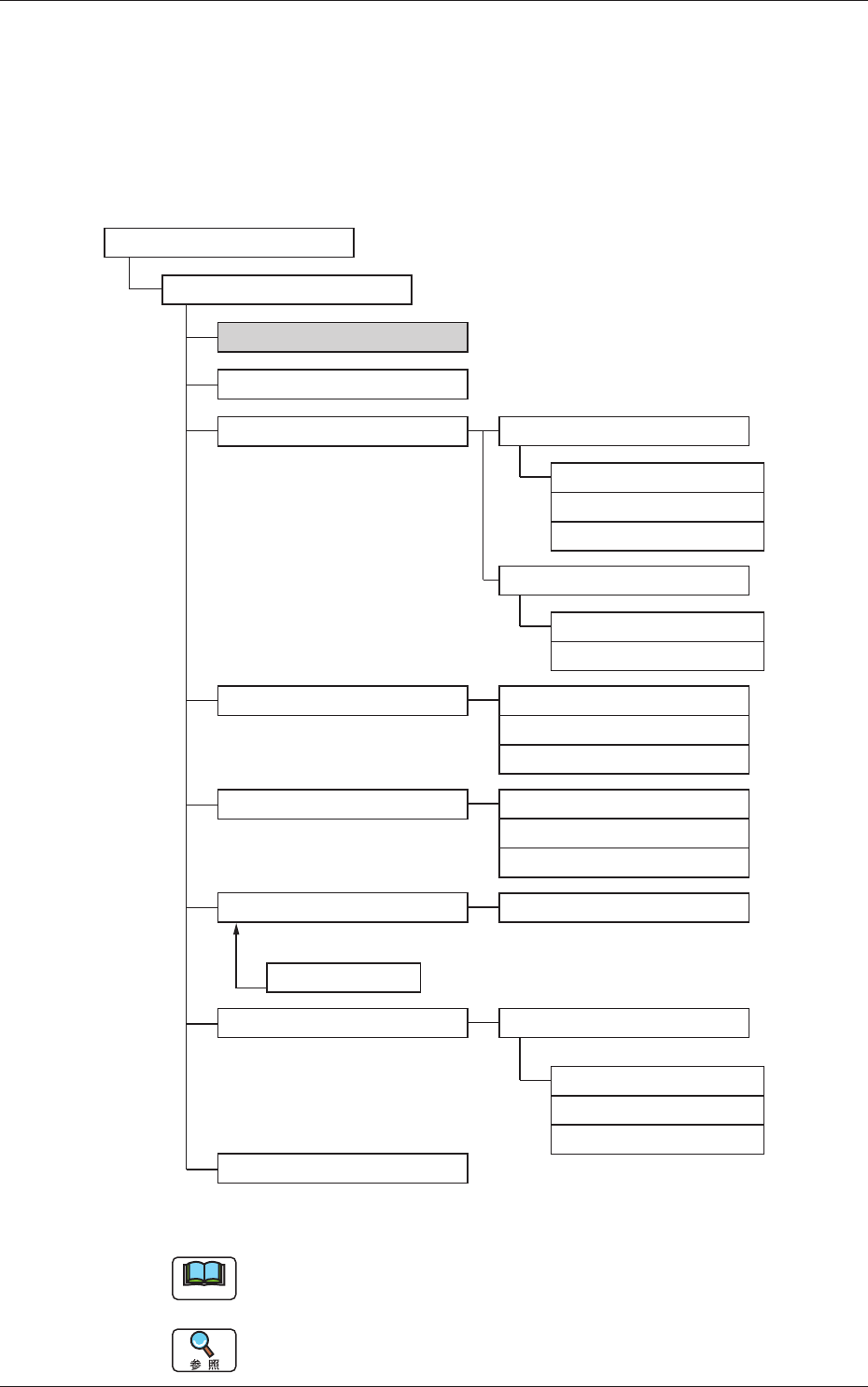
7 OM-1682 4. パターンプログラム 4.1 パターンプログラムの構成 デュアル搬送用のパターンプログラムは、次のようなデータで構成されて います。 パターンプログラム パターンプログラム名 共通 基板 オペレーション 制御 ノズル配置 部品配置 部品ライブラリ 部品 ID 装着 基板認識 制御 基板位置決め 搬送速度 ノズル配置 ノズルストッカ 1 ノズルストッカ 2 機能 基板認識マーク 動作 段取 段取 バックアップピン …
6
OM-1682
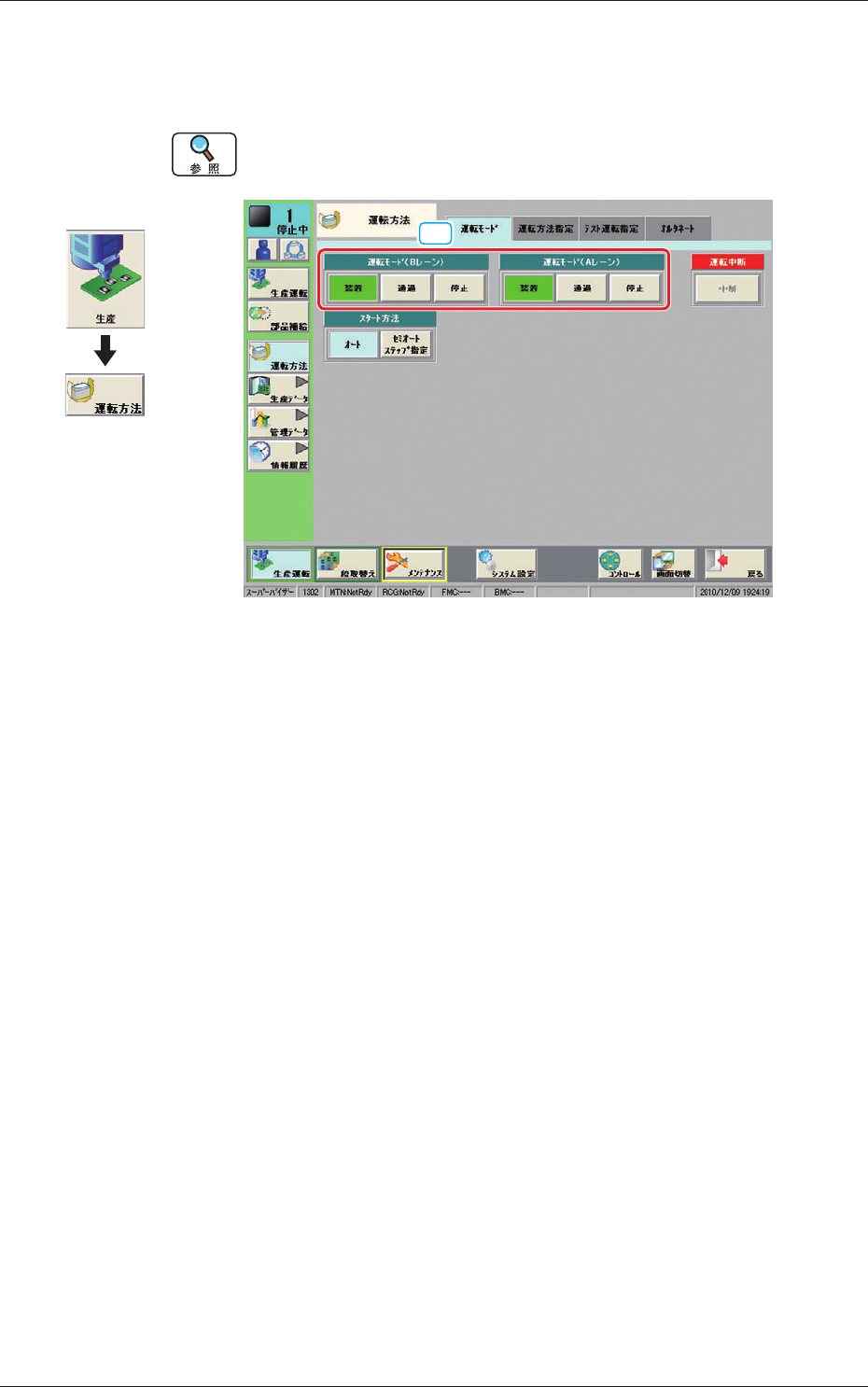
3.2 運転モード
装置の運転モードを各レーンごとに指定します。
デュアル搬送対応以外の説明については、本体取扱説明書
SIGMA-G5
“2
巻1 章4.1運転モード”を参照してください。
[1]
Fig. 6 運転モード
[1] 運転モード(A、B レーン)
以下のボタンを押して各レーンの運転モードを切替えます。
[ 装着 ] ボタン:生産運転を行う場合はこちらを選択します。
[ 通過 ] ボタン:通過運転を行う場合はこちらを選択します。
“生産運転”画面の上部“状態表示”に、切替えた運転モードが表示
されます。
画面展開
3.2 運転モード
1101-001
7
OM-1682
4. パターンプログラム
4.1 パターンプログラムの構成
デュアル搬送用のパターンプログラムは、次のようなデータで構成されて
います。
パターンプログラム
パターンプログラム名
共通
基板
オペレーション
制御
ノズル配置
部品配置
部品ライブラリ
部品 ID
装着
基板認識
制御
基板位置決め
搬送速度
ノズル配置
ノズルストッカ 1
ノズルストッカ 2
機能
基板認識マーク
動作
段取
段取
バックアップピン
ブロック 1(2)
Un
オフセット
P データ
O データ
吸着・装着順
Fig. 7 パターンプログラムの構成図
ノート
灰色で塗られたか所が、デュアル搬送対応で変更のある項目です。
デュアル搬送対応以外の説明については、本体取扱説明書
SIGMA-G5
“2
巻2 章パターンプログラム”を参照してください。
4. パターンプログラム
1101-001
8
OM-1682
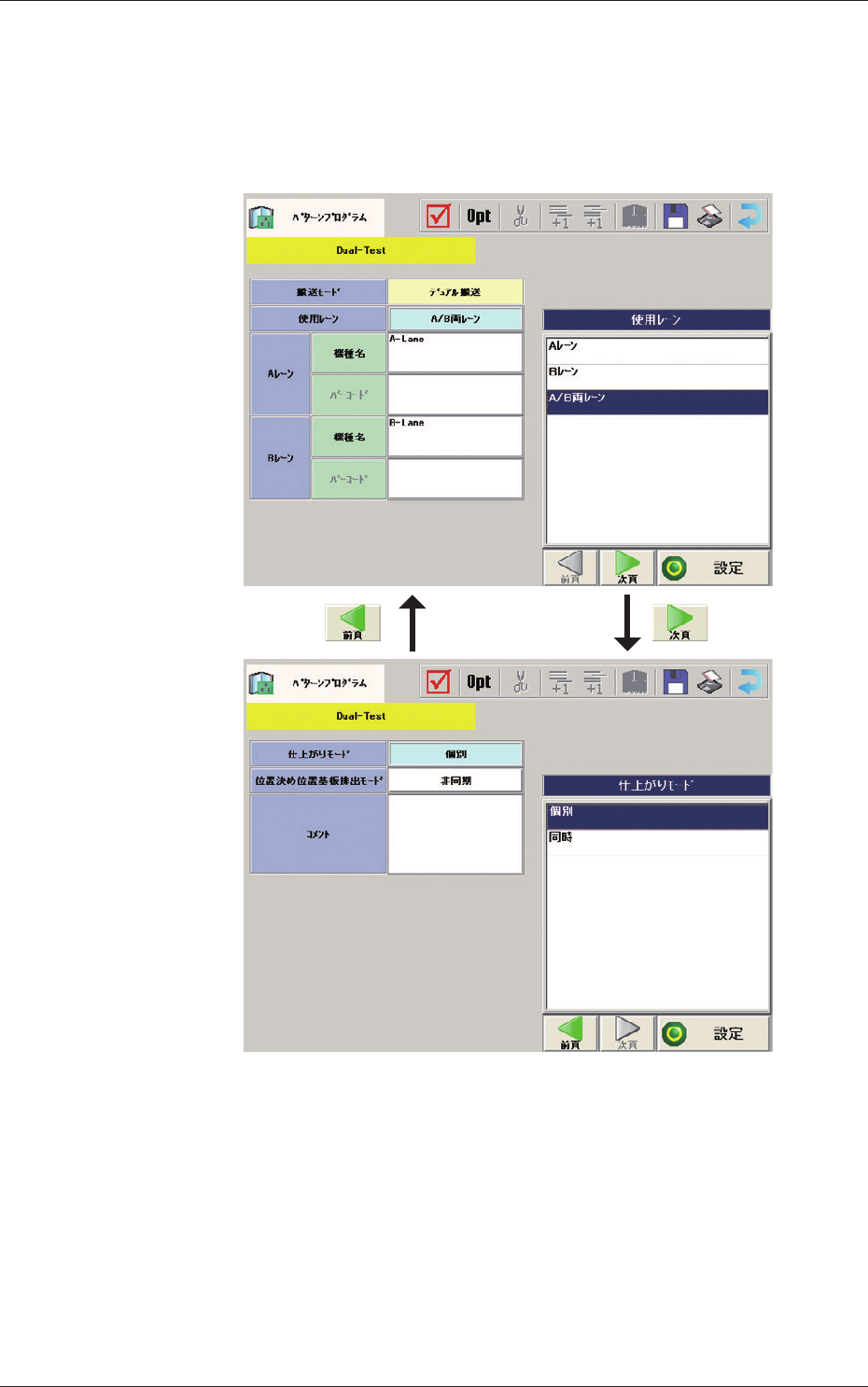
4.2 パターンプログラムの説明
4.2.1 共 通
共通データ
Fig. 8
4.2 パターンプログラムの説明
1101-001