TR7500_Hardware_ch - 第16页
15 圖 2 . 11 P C & P L C I /O 2 . 4 .4 步進 ( S) : 選擇 步進 時 , 可 監 測系統 運 轉 中 發生 問題 的步 驟 ; 系統 復歸 、 通 過 ( B Y P A SS ) & 一般 運 轉 時會顯 示 。 圖 2 . 12 步進 2 . 4 .5 連線 :可 利 用 P O R T 1 及 P O R T2 自 我 檢 測, 將 P O R T1 與 P O R T2 …
14
2.4.1 輸入(X):可利用圖 2.6 及圖 2.7 中的 X80~X9F並對照表 2.1,監測 PLC 的輸入點是
否正常。
圖2.6 輸入 1
圖2.7 輸入 2
2.4.2 輸出(Y):可利用圖 2.8~圖 2.10 中的 Y100~Y120 並對照表 2.1,監測 PLC 的輸出點
是否正常。
圖2.8 輸出 1
圖2.9 輸出 2
圖2.10 輸出 3
2.4.3 PC & PLC I/O: 可使用此功能配合 AOI 主程式,檢視 PC 及 PLC 間的輸入及輸出訊
號。
15
圖2.11 PC&PLC I/O
2.4.4 步進(S):選擇步進時,可監測系統運轉中發生問題的步驟;系統復歸、通過(BYPASS)
& 一般運轉時會顯示。
圖2.12 步進
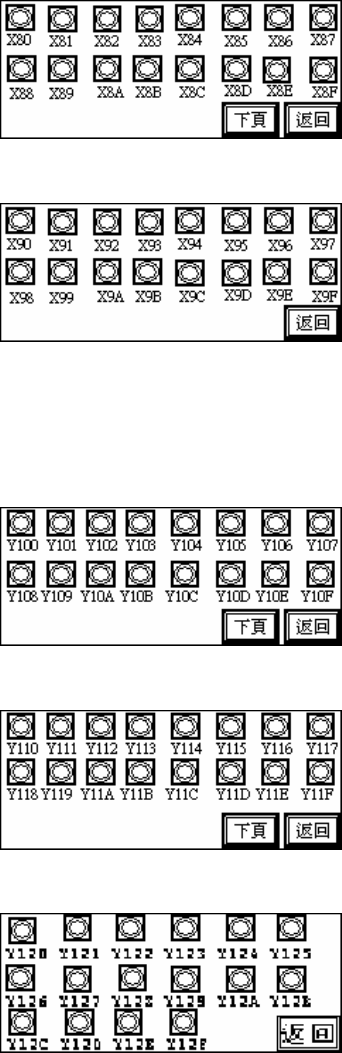
2.4.5 連線:可利用 PORT 1 及 PORT2 自我檢測,將 PORT1 與 PORT2 相同線色的接頭對
插,由圖 2.13 中按下 Y***(輸出)即可監視相對應的 X**(輸入)是否有顯示。
圖2.13 連線
表2.1 I/O(PF2-XY64D2T&PF2-Y16P) 單元
PIN
Number
PIN DIFN.
X80(IN) EMS
X87(IN)
DRCH 復歸 DONE(TR-7100 使用)
X90(IN) SENSOR1
X91(IN) SENSOR2
X92(IN) SENSOR3
X93(IN) SENSOR4
X94(IN) SENSOR5
X95(IN) SENSOR6
X98(IN)
後站 READY (from loade—port2 黑綠)
X9A(IN) TEST OK (from pc)
X9B(IN)
PC 測試完成 (from pc)
16
X9C(IN) PC ABORT (from pc)
X9D(IN)
清除通知 PC 測試 (from pc)
X9E(IN)
2D LED2(from PC,TR-7006/L 使用)
X9F(IN)
LASER ON(from PC,TR-7006/L 使用)
Y100(OUT)
紅燈
Y101(OUT)
黃燈
Y102(OUT)
綠燈
Y103(OUT)
BUZZER
Y104(OUT)
向前站要板 (to unloade---port1 黑綠)
Y105(OUT)
TEST OK (to unloade---port1 黃白)
Y109(OUT)
BARCODE START
Y110(OUT)
輸送帶馬達啟動(TR-7100 使用)
Y111(OUT)
輸送帶馬達停止(TR-7100 使用)
Y112(OUT)
輸送帶馬達減速(TR-7100 使用)、2D LED2(TR-7006/L 使用)
Y113(OUT)
輸送帶馬達反轉(TR-7100 使用)、2D LED1(TR-7006/L 使用)
Y114(OUT)
DRCH POWER(TR-7100 使用/ TR-7100EP)
Y115(OUT)
DOS PC POWER(TR-7100 使用/ TR-7100EP)
Y116(OUT)
板寬煞車
Y117(OUT)
通知 PC 測試(TR-7100EP/TR-7006 使用)
Y118(OUT)
通知 PLC 緊急停止(TR-7100EP/TR-7006 使用)
Y119(OUT)
通知 PC READ BARCODE(TR-7100EP/TR-7006 使用)
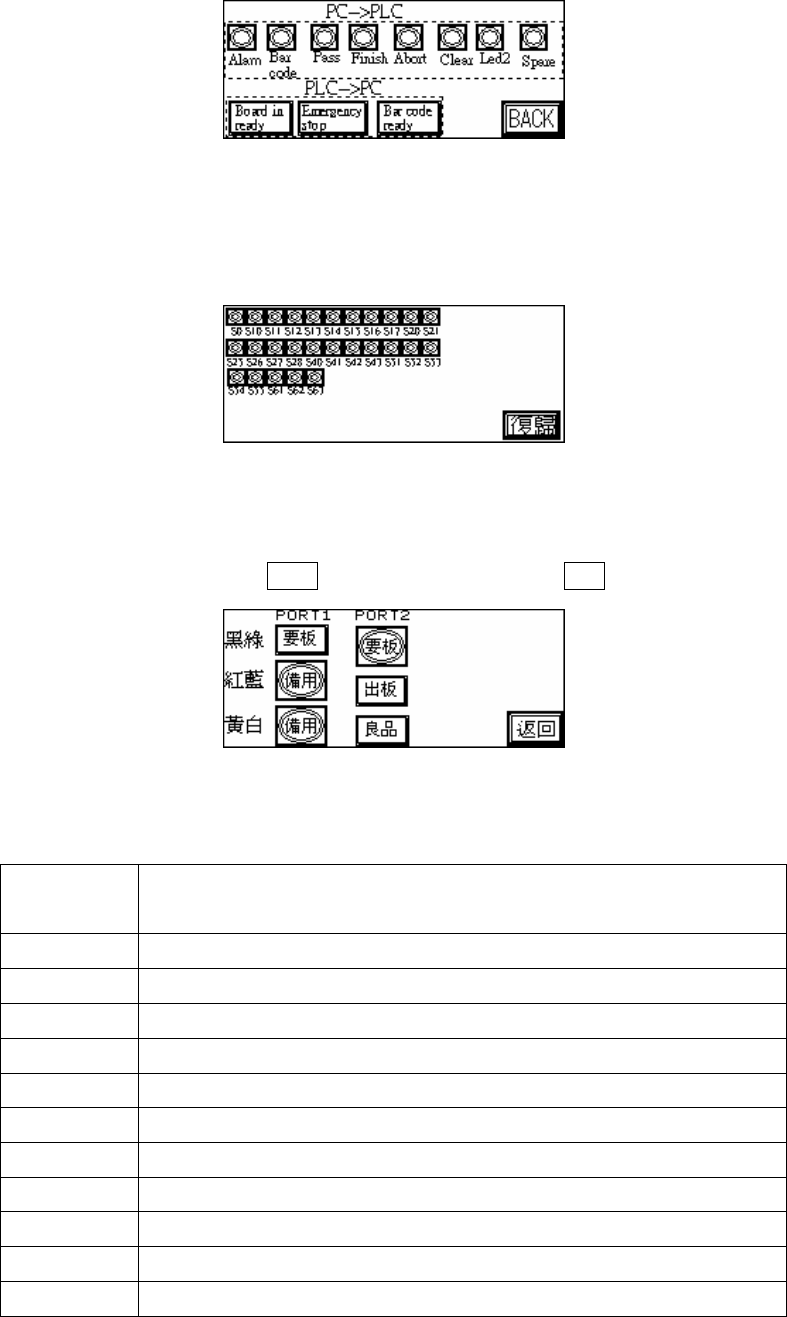
2.5 夾板(圖 2.14):按夾板上升或夾板下降可分別測試夾板是否動作正常;按返回畫面會跳回
圖 2.1DEBUG 畫面。
圖2.14 夾板
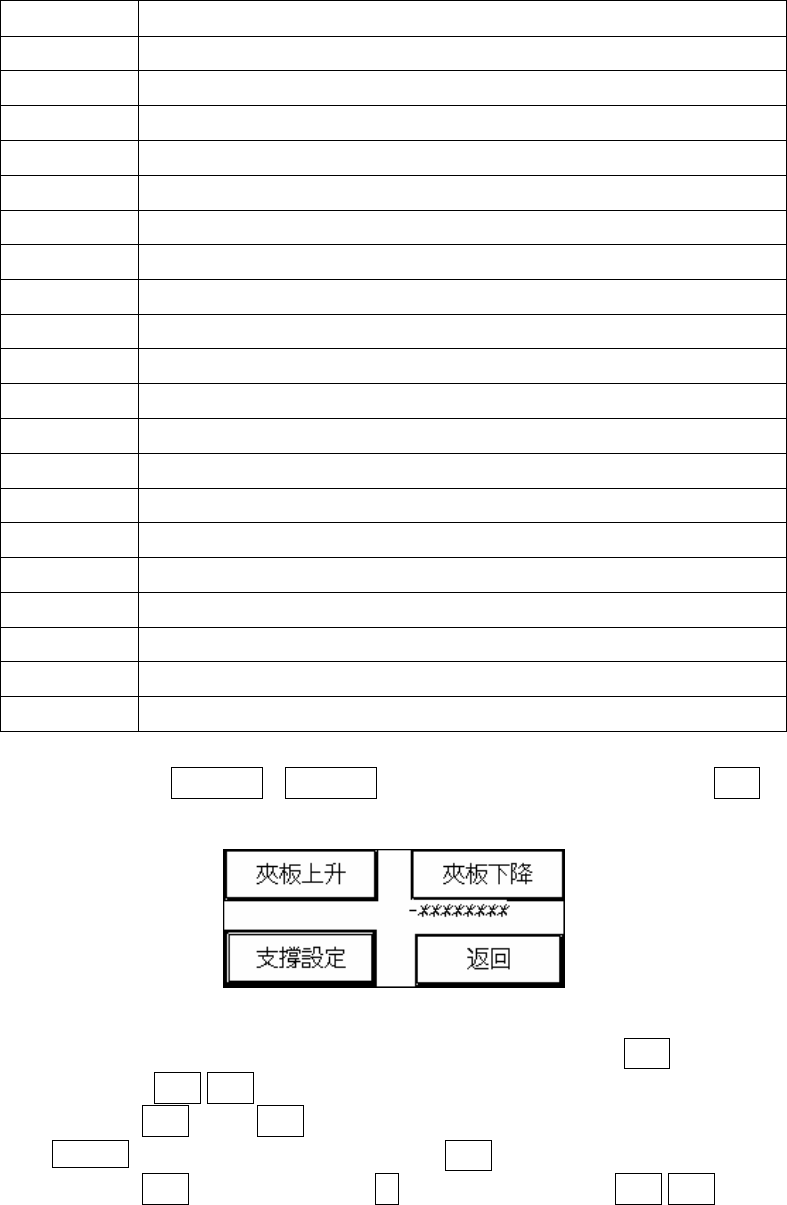
2.5.1 支撐設定 (圖2.15):將待測板放在進板 Sensor 處,然後按輸入,待測板會進入到定
位,再按 上升/下降按鈕,寸動調整上/下,首先需調至下限位置(下限指示燈亮),
然後按下歸零,再按上升調至待測板所要支撐的位置,如下圖 2.15 所示,同時在
-******處顯示設定值,設定完成後需按返回鈕即可,若無選購此配備或不使用時,
請務必按開啟,並在圖 2.16 選擇否(否則會無法復歸),在上升/下降按鈕的右側各為
上升及下降的極限 SENSOR 指示燈,若該燈亮即表示已到達極限。