TR7500_Hardware_ch - 第29页
28 3 Su p po r t Pi n 3 .1 架構及功能 使用 外 接式 頂昇 模 組 , 利 用 人機介面 來 設定 頂昇 模 組上 昇 的 量 , 藉 以 補償 P CB 的板 彎校 正。 3 .2 安裝 頂昇 模 組 ( S u p p o r t P in ) 的馬達連接線 以 及 S e n s or 連接 線, 直 接連接機台後方的 座孔 ( S e n s o r 7 和 W i d t h c o n t r o…
27
2
輸送帶
2.1 架構及功能
輸送帶主要功能在於帶動 PCB 完成進出板的動作,在機台長期運行之下,可能因人為因素造
成輸送帶未完全落於從動軸上,建議使用者在使用機台時,能注意前後輸送帶是否落於從動軸上,
可增加輸送帶的使用壽命;若需更換皮帶,則將皮帶套在兩側的從動軸上後,再依序套入內側的從
動軸上即可。
2.2 Sensor 調整及更換
1.Sensor1&4(進出板 Sensor):用調棒調整 Sensor 強度至指示燈亮(Sensor 上方有遮蔽物,Sensor
之指示燈會亮,若 Sensor 上方無遮蔽物,則指示燈熄滅), 再 慢慢減弱至指示燈熄滅,即為進出
板之最佳感測狀態。
2. Sensor 2&3(減速及停板 Sensor):調整方式同上,但需再將 LED 燈座移至 Sensor 上方,並檢
查是否會受 LED 燈座干擾,產生誤動作,若有誤動作,則需將 Sensor 靈敏度調低,直到不受
LED 燈座干擾,但感測待測板之功能,需仍然有效。
3.Sensor 5&6(夾板馬達 Sensor):將夾板機構降至最低,並將 Sensor 也移至最低,然後將 Sensor
往上移,直到指示燈亮起後,再慢慢往下移,直到指示燈熄滅即可。
4.更換:若 Sensor 無動作,需先重新調整 Sensor 靈敏度,若仍然無動作,不需維修,直接更換新
的 Sensor;更換方法:先將 Sensor 接頭卸下,再將 Sensor 卸下,然後將新的 Sensor 裝上,
最後再將 Sensor 接頭裝上並鎖緊,更換完畢後,再依調整方法重新調整。
28
3 Support Pin
3.1 架構及功能
使用外接式頂昇模組,利用人機介面來設定頂昇模組上昇的量,藉以補償 PCB 的板彎校正。
3.2 安裝
頂昇模組(Support Pin)的馬達連接線以及 Sensor 連接線,直接連接機台後方的座孔(Sensor
7 和 Width control motor),硬體安裝方面即可完成。
3.3 設定步驟
l 設定說明
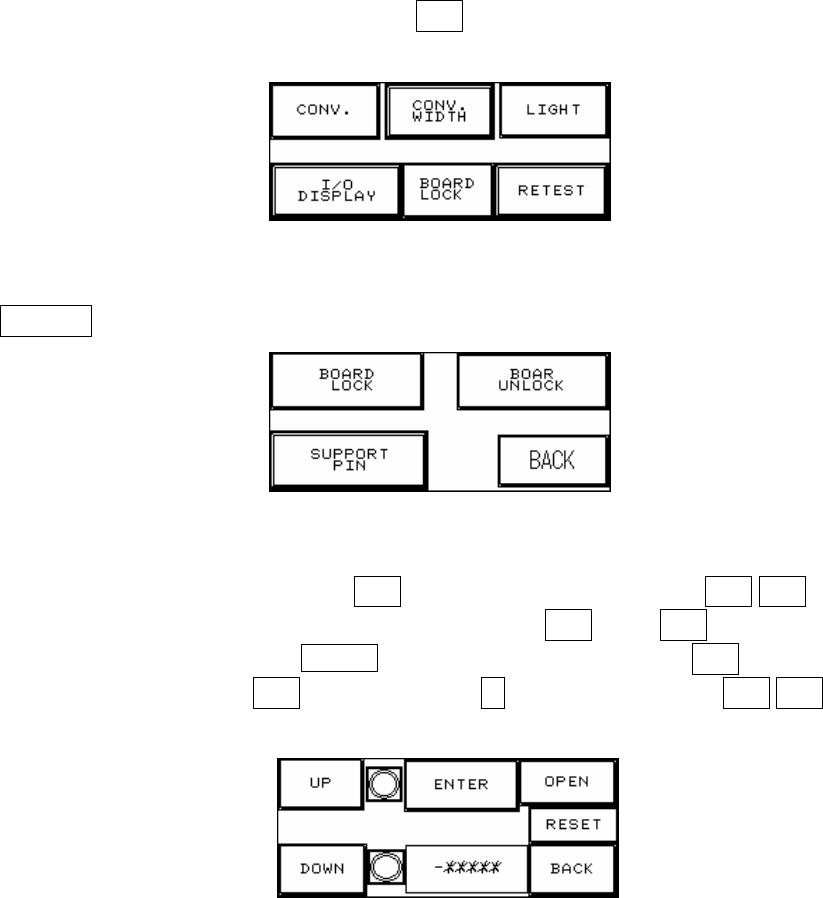
1.按人機介面右上角及左上角進入下圖 2.1,按夾板 進入圖 2.2.
圖 2.1
2.按支撐設定 進入圖 2.3.
圖 2.2
3. 將待測板放在進板 Sensor 處,然後按輸入,待測板會進入到定位,再按 上升/下降按鈕,寸動
調整上/下,首先需調至下限位置(下限指示燈亮),然後按下歸零,再按上升調至待測板所要支撐
的位置,如下圖 2.5 所示,同時在 -******處顯示設定值,設定完成後需按返回鈕即可,若無選購
此配備或不使用時,請勿必按開啟,並在圖 2.4 選擇否(否則會無法復歸),在上升/下降按鈕的右
側各為上升及下降的極限 SENSOR 指示燈,若該燈亮即表示已到達極限.
圖 2.3
29
圖 2.4
圖2.5
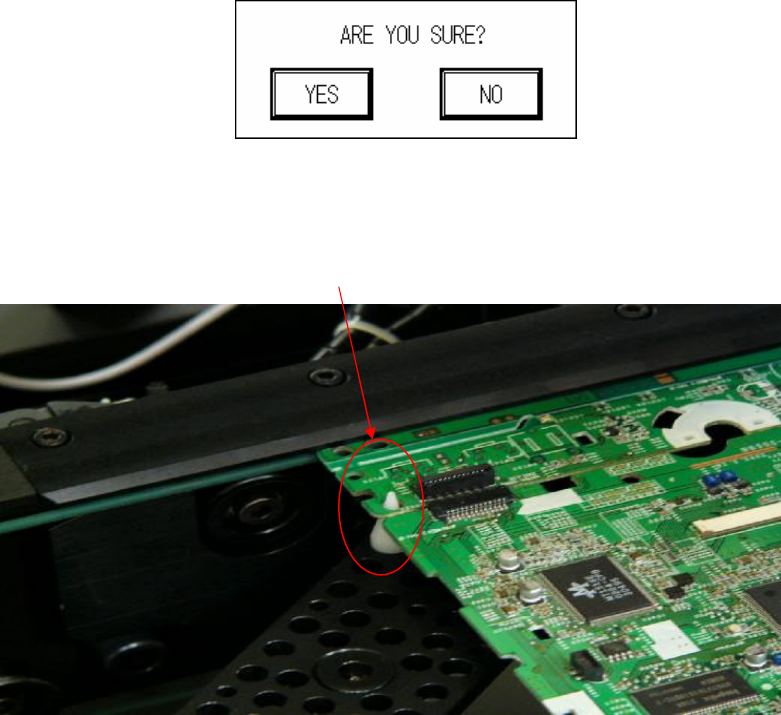
3.4 配線圖
SUPPORT PIN 所要支撐的位置