SM411 Introduction(Chi Ver1) - 第26页
Samsung Component Placer SM41 1 Intr oduction xiv Head Assembly 由 Head Assembly (贴装头组件)高 速贴装头和精密贴装头构成,属 于贴装头组 件的器头部系 统由支持 空压装置的 Head Body (前壳)和 Spindle (轴),驱动 引擎和识别部件形象的 Flying Vision module ( 浮动显示组件 ) 和 Fiducial Camer…
前言
xiii
述语说明
Vision识别系统
通过图像系统运行教导(Teaching)时的位置确认及Fiducial Mark识别、部件的形
象识别。
Fiducial Camera
把Fiducial Camera和Fiducial Camera Illumination统称为Teaching Camera
Module。主要使用于教导(Teaching)时的位置确认及Fiducial Mark识别。
Flying Vision
把Flying Camera和Flying Camera Illumination统称为Flying Vision。主要使
用于小部件的识别。
Tape Feeder
这是在卷盘(Reel)型元件盒上以Roll方式卷绕的元件供应装置,安装在喂料器底
座上。
如下图所示必须把SM给料器安装于给料器底座后,拧紧锁定把儿
Flying Camera
Flying Camera
Illumination
Fiducial Camera
Fiducial Camera
Illumination
Samsung Component Placer SM411 Introduction
xiv
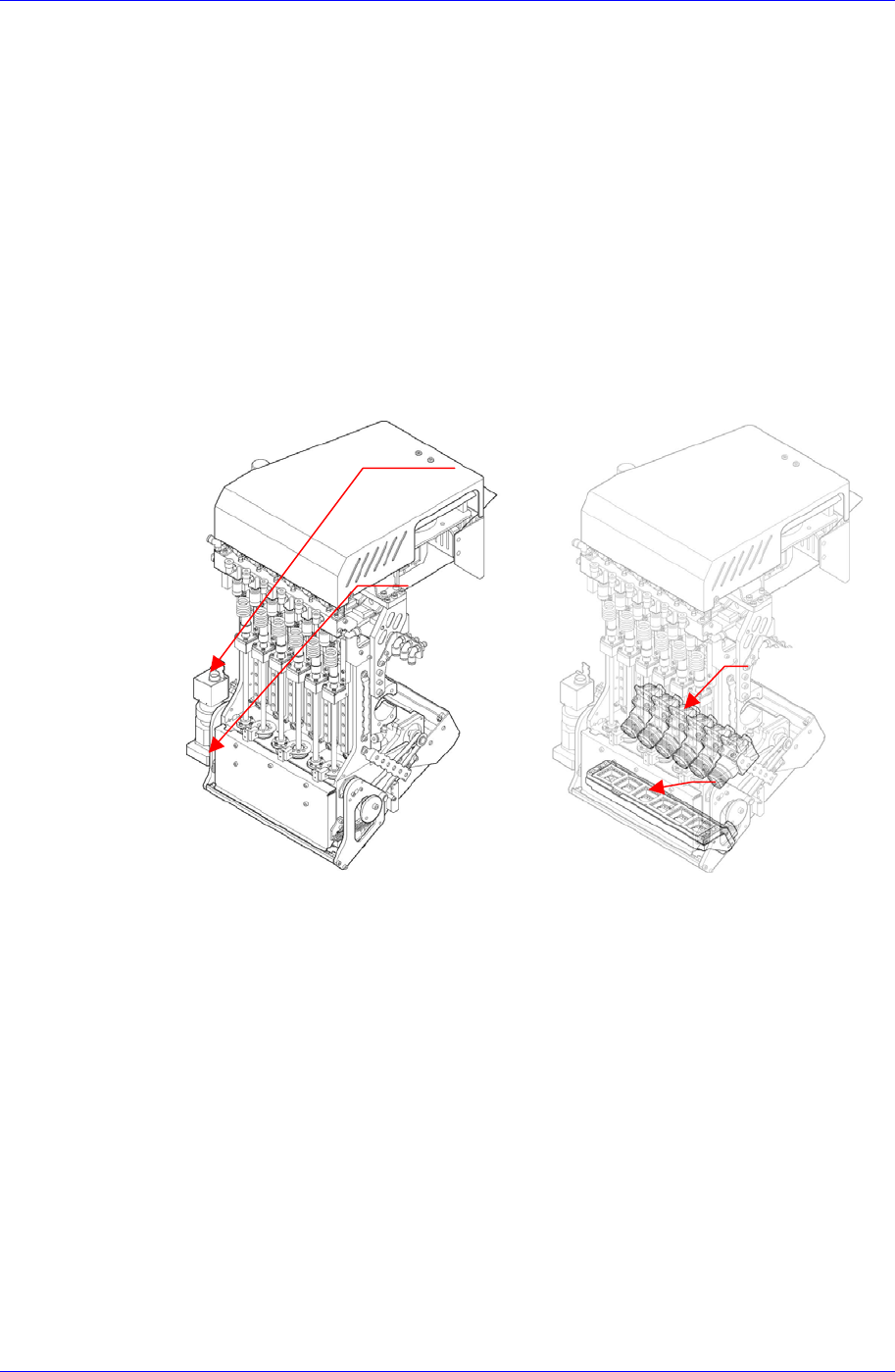
Head Assembly
由Head Assembly(贴装头组件)高速贴装头和精密贴装头构成,属于贴装头组
件的器头部系统由支持空压装置的Head Body(前壳)和 Spindle(轴),驱动
引擎和识别部件形象的Flying Vision module ( 浮动显示组件 ) 和 Fiducial
Camera(置信摄象机)构成。
Module
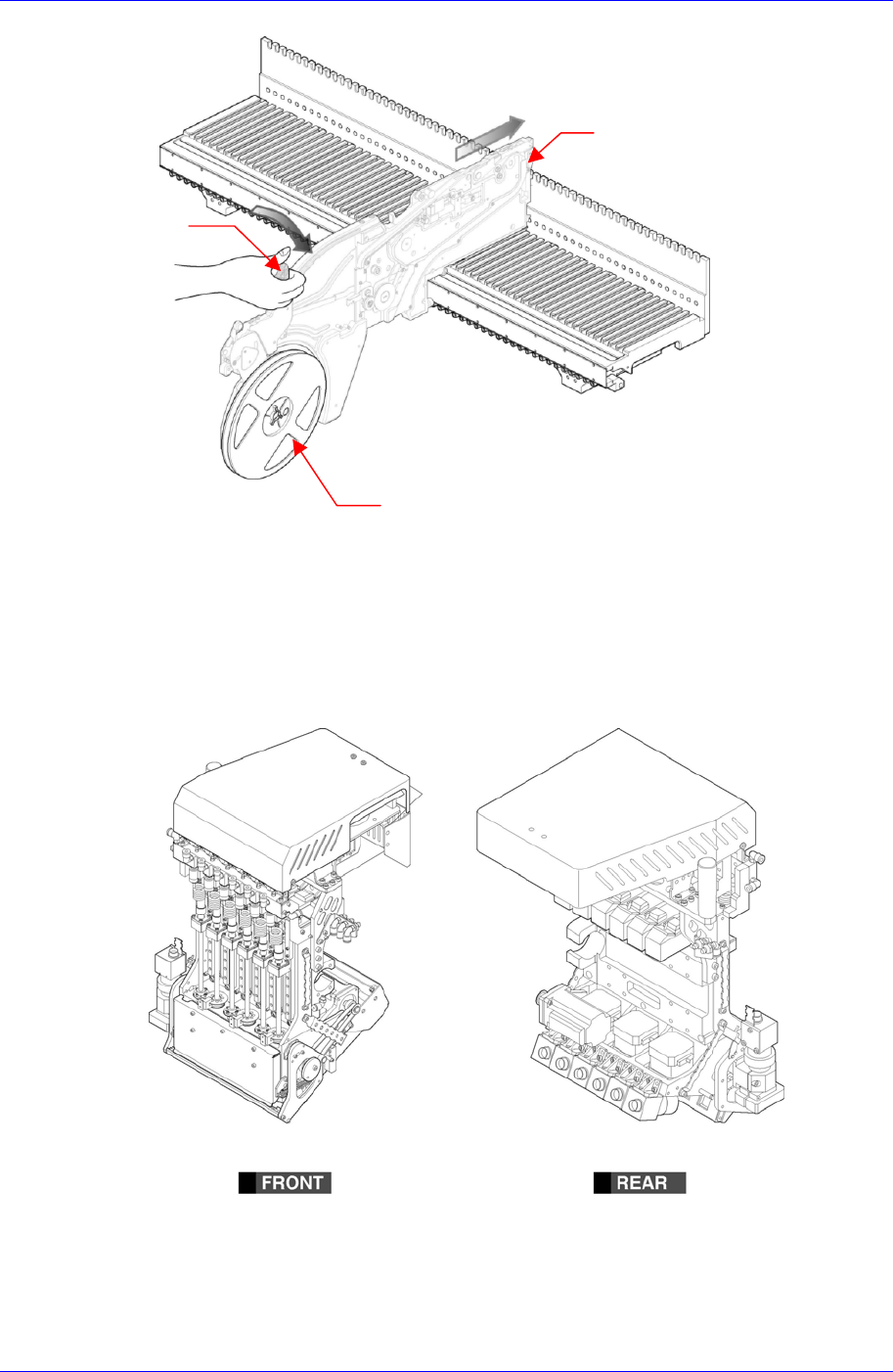
它是整个系统独立的部分,代表可以进行动作的机构单元。
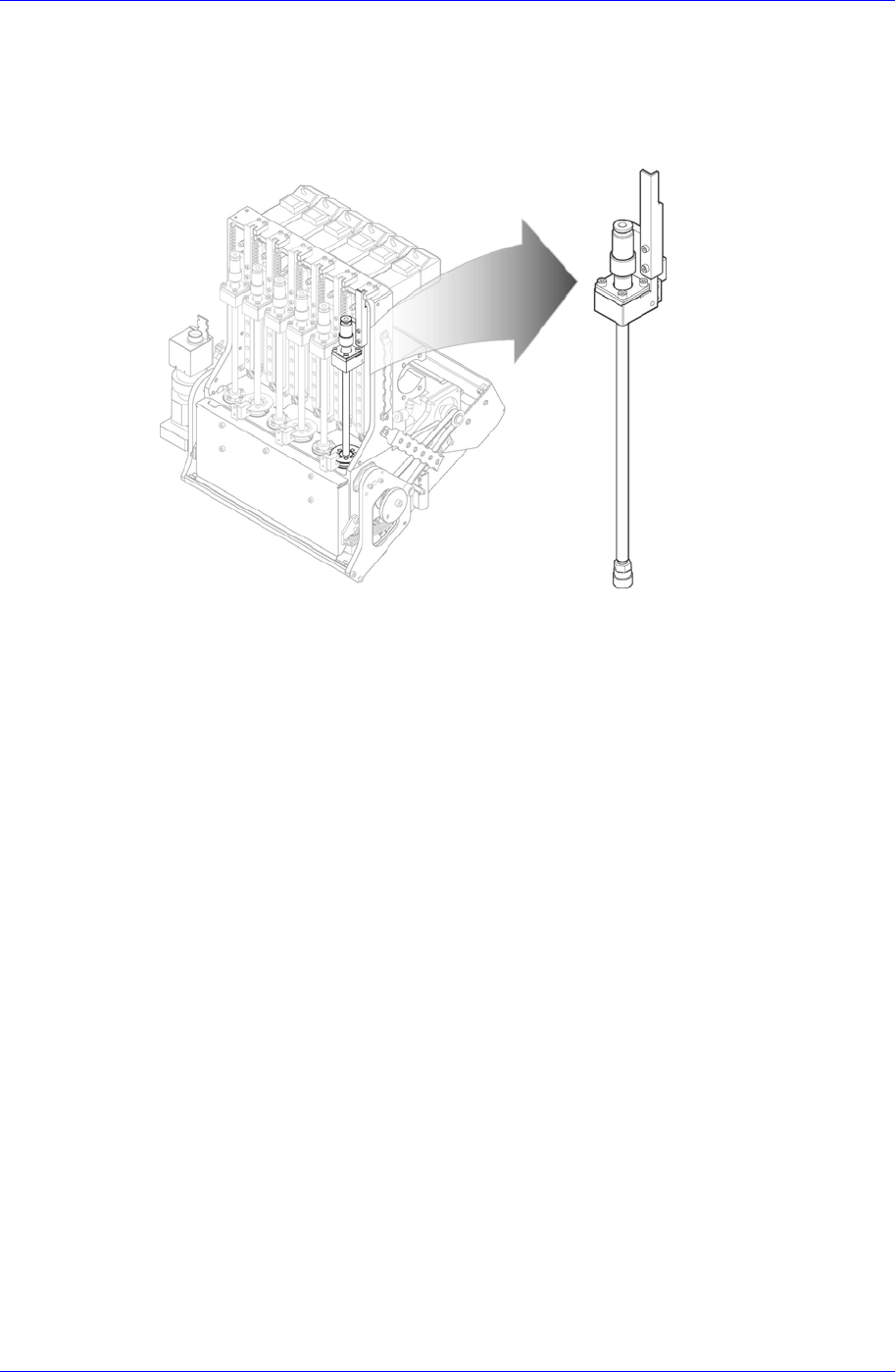
Spindle
Reel(卷盘)
SM Feeder(飞达主体)
锁定把儿
送料器进行方向
前言
xv
它是一个旋转的小轴,属于设备的 Head Assembly,尾端有 Nozzle Holder。它
通过高度精密驱动的 Timing Belt 与 Servo Motor 执行 Z 轴动作,Z 轴进行元件
的吸附与贴装作业。通过 Micro Step Motor 执行具有校正元件位置作用的
θ轴
动作。
微晶片(Micro Chip)
像 0402, 0603 晶片元件一样尺寸很小的晶片元件。
节距(Pitch)
以一定规则互相对应的两个位置之间的间隔。
Timing Belt
这是一条连接电动机的驱动轴与实际驱动对象驱动轴的橡胶带(belt),具有兼顾
了两轴之间驱动比的齿轮比,可以准确地控制驱动。