SM411 Introduction(Chi Ver1) - 第53页
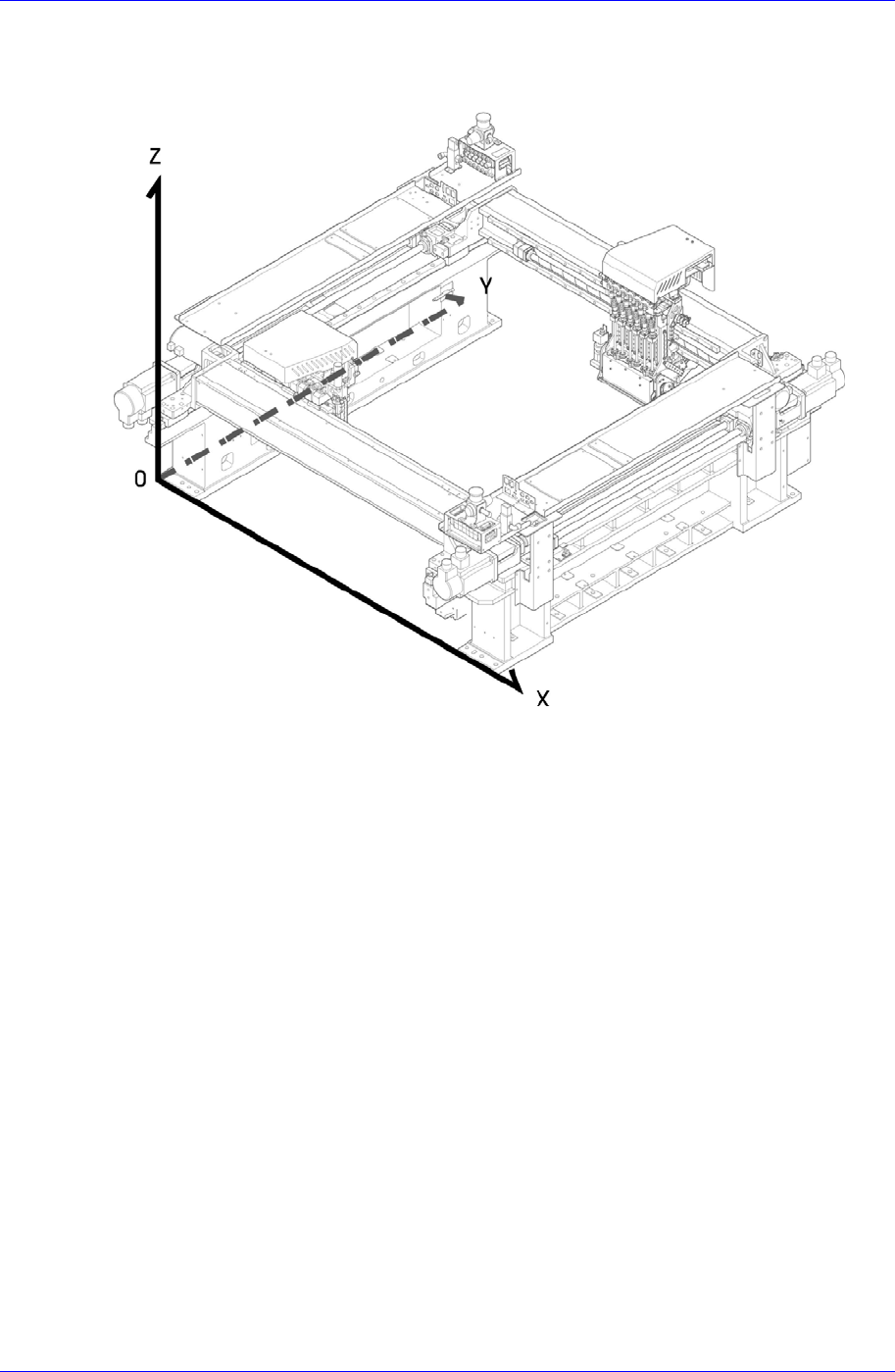
设备的名称及构成 3-5 3.3. 坐标系 本设备基本的坐标系如以下 ” 图 3-4 ” 所示。 图 3-4. 设备的坐标系 3.3.1. X, Y 轴 表示 Head, ANC, 贴装点 (Placement Position), PCB 的基准 点标记( Fiducial Mark ) 的位置。 3.3.2. Z 轴 Z 轴表示从 Head 到吸嘴尾端的位置,把固定基板的上面 位置作为 0 。 3.3.3. Theta (R) 轴 …
Samsung Component Placer SM411 Introduction
3-4
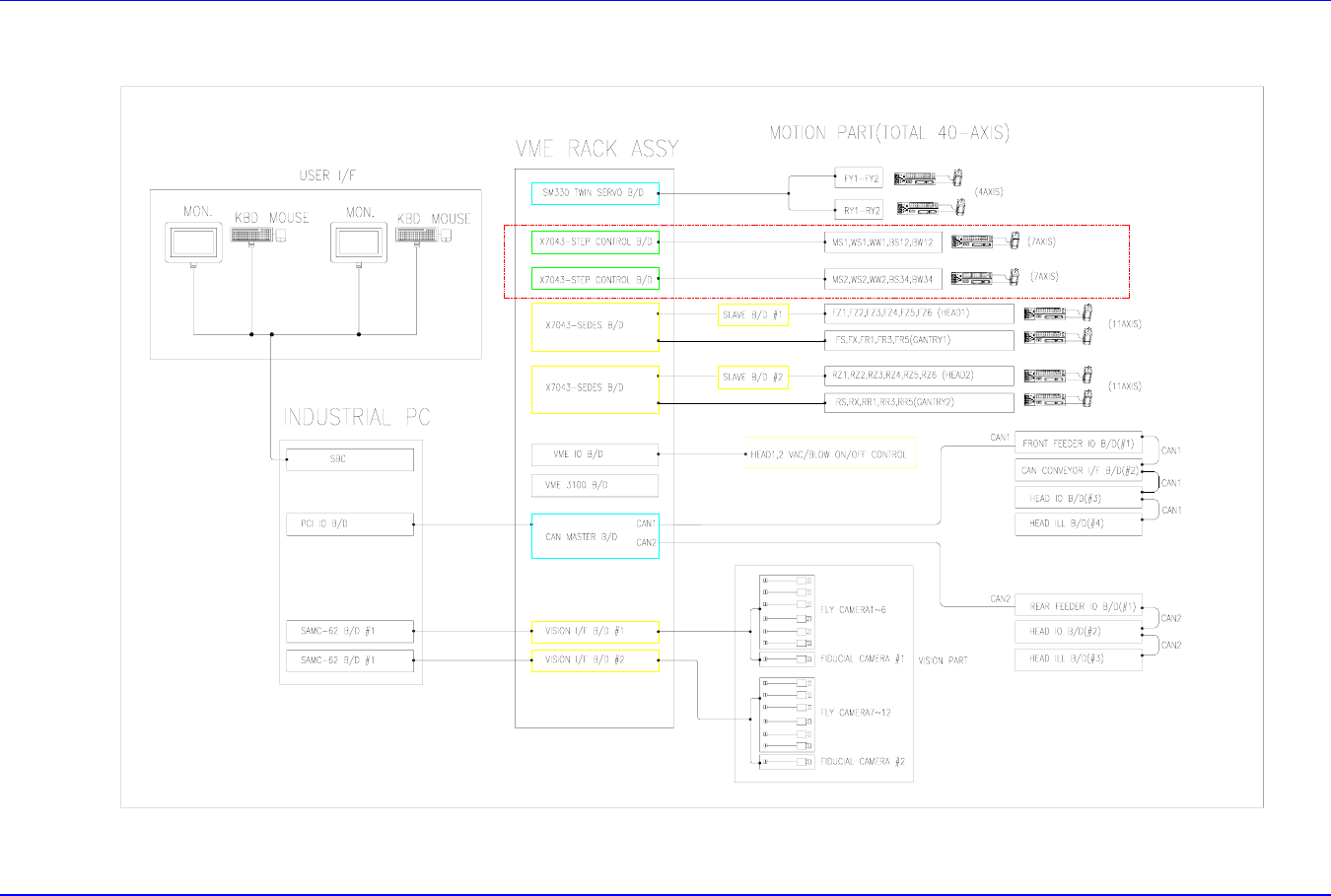
3.2.2. 控制部分的构成
图
3-3.
控制部分的结构图
设备的名称及构成
3-5
3.3. 坐标系
本设备基本的坐标系如以下”
图
3-4”所示。
图
3-4.
设备的坐标系
3.3.1. X, Y 轴
表示 Head, ANC, 贴装点(Placement Position), PCB 的基准点标记(Fiducial Mark)
的位置。
3.3.2. Z 轴
Z 轴表示从 Head 到吸嘴尾端的位置,把固定基板的上面位置作为 0。
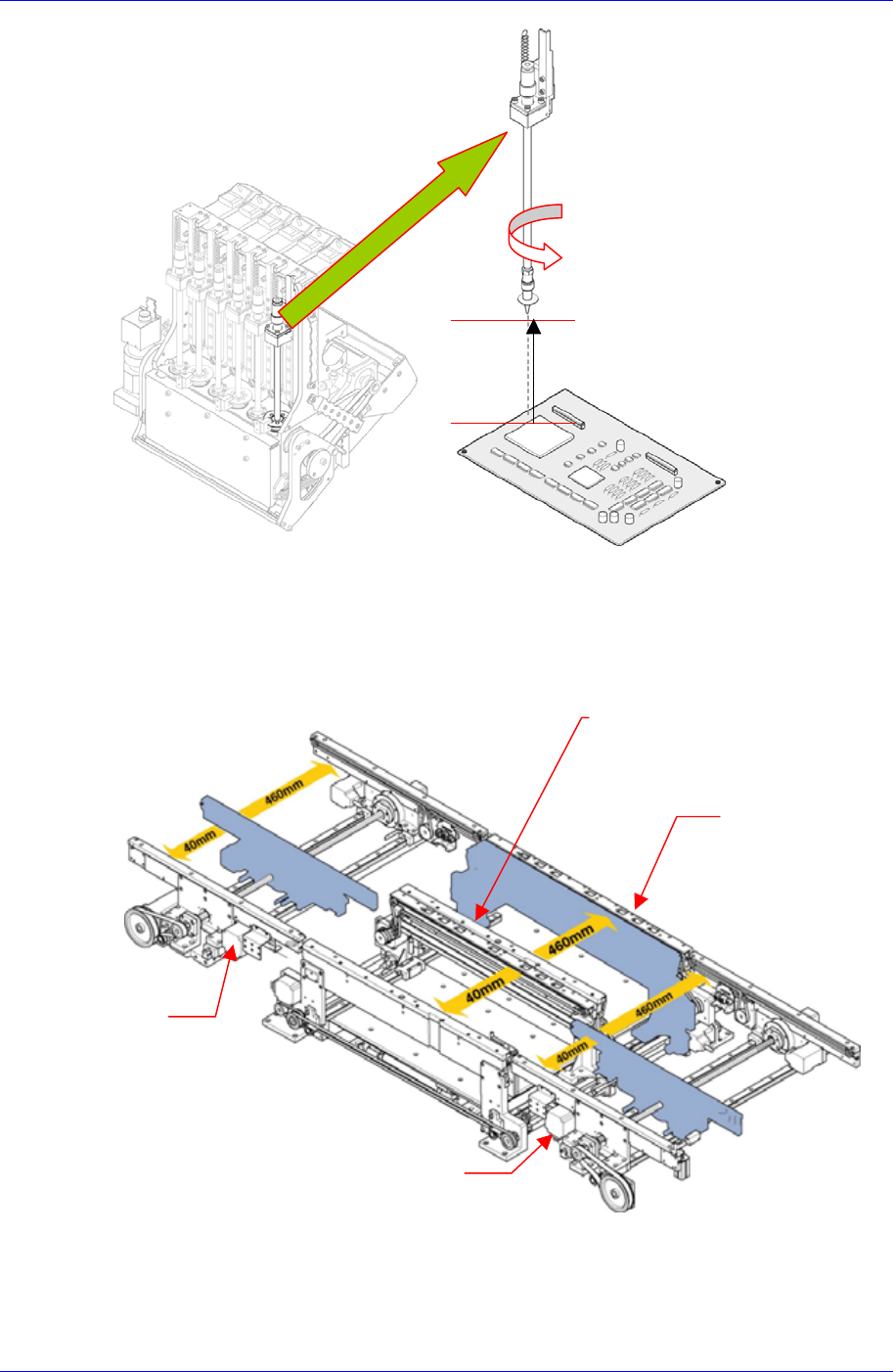
3.3.3. Theta (R) 轴
表示 Head 定位部品中心时的角度。逆时针方向为” + “, 顺时针方向为”-”。
Samsung Component Placer SM411 Introduction
3-6
3.3.4.
Conveyor 轴
以输送带固定框架(Fixed Frame)为基准,移动输送带的移动框架(Moving Frame)以
便调节输送带宽度。
Z轴高度 (+)
R轴旋转方向 (+)
移动框架
(Moving Frame)
固定框架
(Fixed Transport Rail)
Entry
Shuttle
Exit Shuttle