LmrXP142机械手册.pdf - 第109页
Part 5 Chapter 1 Servo System Troubleshooting Edition 3.0 5-1-10 XP-142E Mechanical Reference Alarm title Alarm Cause Investigation and corrective actions NP1MT005Ea A5H Encoder abnormality 3 When abnormalities are detec…
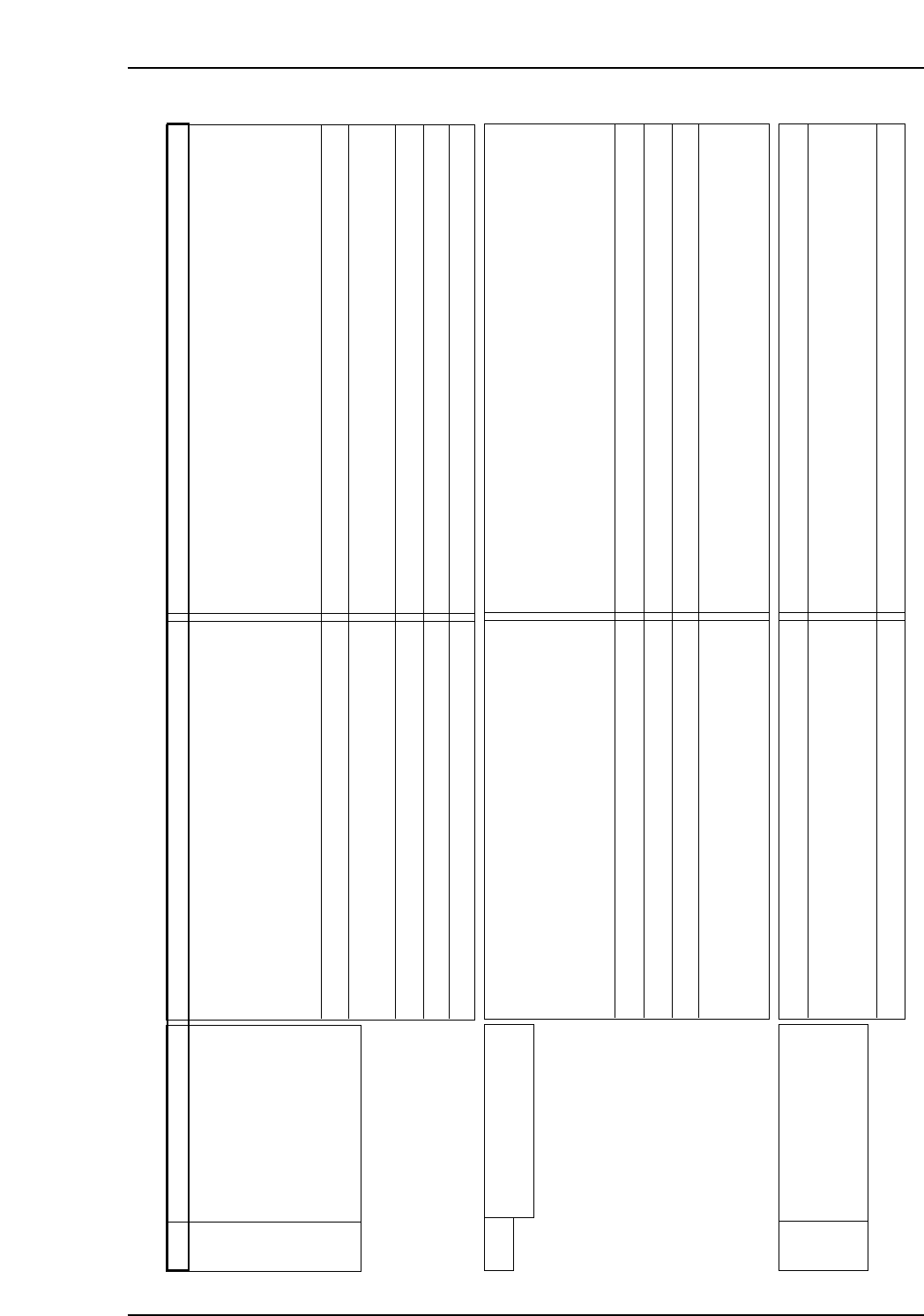
AC Servopack Check List for Troubleshooting
Alarm titleAlarm Cause Investigation and corrective actions
NP1MT004Ea-2
85H Encoder initial process
abnormality
For encoder wiring:
• Improper wiring
• Connector is removed
• Loose connection
• Encoder cable is too long
• Encoder cable is too thin
• Check wiring and repair any abnormality.
• Confirm that the encoder power supply voltage of the motor is
above 4.75V; increase it if below 4.75V.
Wrong amplifier encoder type is selected. Select the correct encoder type.
Defect servo amplifier control circuit. Replace the servo amplifier.
Defect in servo motor encoder. Replace the servo motor.
Initial position data could not be set, as the number of
rotations of the motor is more than 300 min during
power supply.
Restart the power supply after motor is stopped.
(Only when PA 035C sensor is used.)
91H
92H
93H
94H
Encoder command abnormality
Encoder FORM error
Encoder SYNC error
Encoder CRC error
Defect in encoder Replace the servo motor
Malfunction due to noise • Confirm proper grounding of the amplifier.
• Check the shielding of the encoder cable.
• Add ferrite core or similar countermeasures against noise.
Abnormality in encoder wiring. Check wiring between the encoder and amplifier.
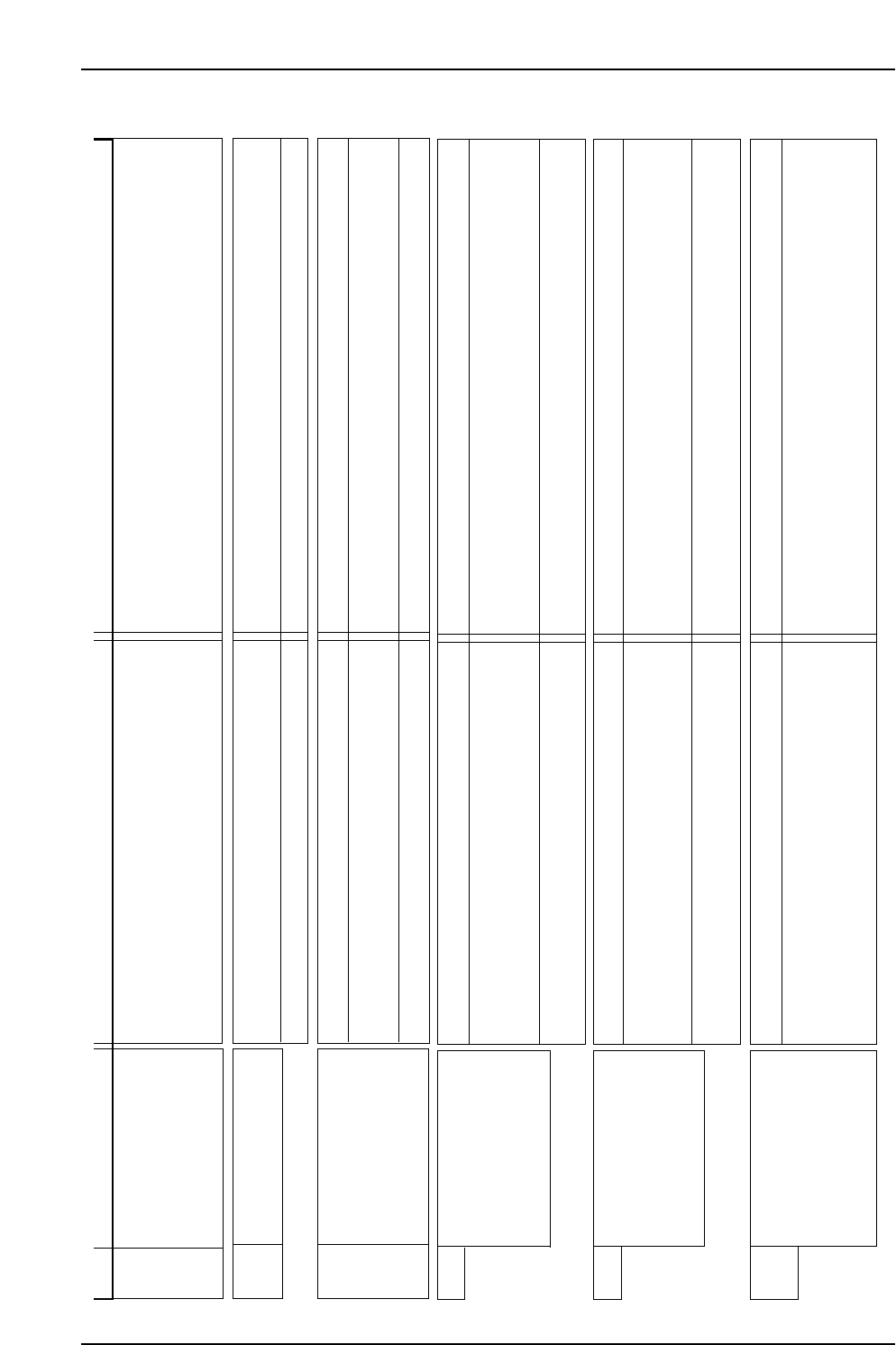
81H
82H
83H
84H
87H
Encoder A phase/B phase
pulse signal abnormality 1
Breaking of absolute signal wire
External encoder A phase/B
phase signal abnormality
Abnormality in communication
between encoder and amplifier
CS break
For encoder wiring:
• Improper wiring
• Connector is removed
• Loose connection
• Encoder cable is too long
• Encoder cable is too thin
• Check wiring and repair any abnormality.
• Confirm that the encoder power supply voltage of the motor is
above 4.75V; increase it if below 4.75V.
Wrong amplifier encoder type is selected. Select the correct encoder type.
Motor encoder that does not match with amplifier
encoder type is attached.
Replace with servo motor equipped with proper encoder.
Defect servo amplifier control circuit. Replace the servo amplifier.
Defect in servo motor encoder. Replace the servo motor.
Parameter set to 'Full-close/Servo system'. Edit the parameter and set to 'Semi-close/System setup'.
-1
Part 5 Chapter 1 Servo System Troubleshooting
Edition 3.0 5-1-9 XP-142E Mechanical Reference
Part 5 Chapter 1 Servo System Troubleshooting
Edition 3.0 5-1-10 XP-142E Mechanical Reference
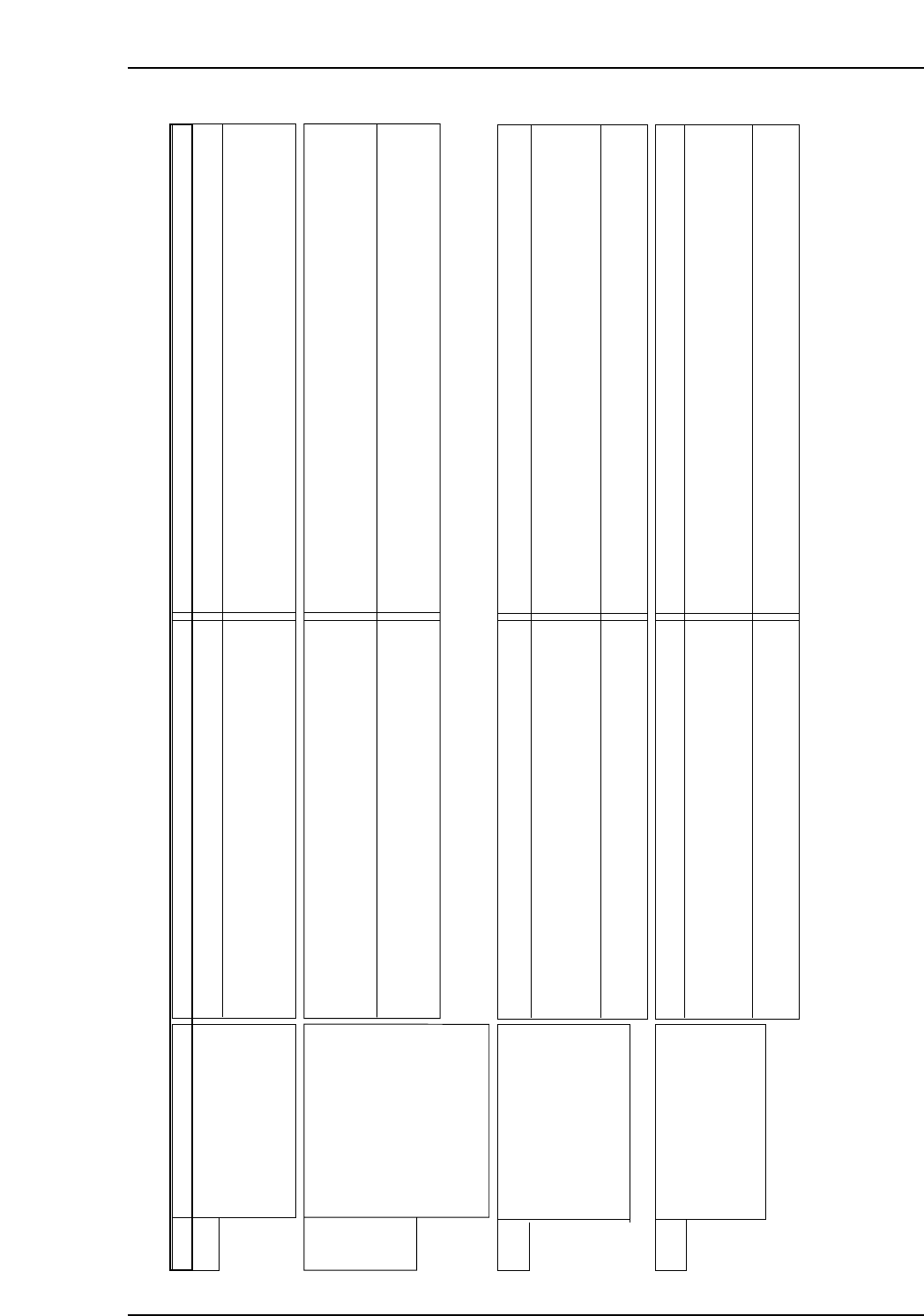
Alarm titleAlarm Cause Investigation and corrective actions
NP1MT005Ea
A5H Encoder abnormality 3
When abnormalities are detected
in the internal part of the absolute
position detector for the
asynchronous system.
Defect in internal circuit of encoder. Turn ON the power supply again; if not restored, replace the motor.
Malfunction due to noise • Confirm proper grounding of the amplifier.
• Check the shielding of the encoder cable.
• Add ferrite core or similar countermeasures against noise.
Number of rotations exceeds the permitted number of
rotations.
Turn ON the power supply again, when motor is stopped.
A6H Encoder abnormality 4
When abnormalities are detected
in the internal part of the absolute
position detector for the
asynchronous system.
Defect in internal circuit of encoder Turn ON the power supply again; if not restored, replace the motor.
Malfunction due to noise Confirm proper grounding of the amplifier.
Check the shielding of the encoder cable.
Add ferrite core or similar countermeasures against noise.
Malfunction due to noise • Confirm proper grounding of the amplifier.
• Check the shielding of the encoder cable.
• Add ferrite core or similar countermeasures against noise.
Multi-rotation counter overflows. Correct the operation pattern, and avoid the continuous operation in
a fixed direction.
A7H
A8H
Encoder abnormality 5
Encoder abnormality 6
When abnormalities are detected
in the internal part of the absolute
position detector for the
asynchronous system.
Defect in internal circuit of encoder Turn ON the power supply again; if not restored, replace the motor.
Low battery voltage Check the battery voltage.
A1H Encoder abnormality 1
When abnormalities are detected
in the internal part of the absolute
position detector (RA062M) for
the asynchronous system.
Defect in internal circuit of encoder Turn ON the power supply again; if not restored, replace the motor.
A2H Abnormality in absolute
encoder battery
Loose connection of battery cable. Confirm the battery connection in the front ON/OFF switch of the
amplifier.
Motor is not generating heat, but encoder ambient
temperature is high.
Confirm that the cooling method keeps the encoder ambient
temperature below 80 °C.
Motor is overheated. Confirm the cooling procedure of the servo motor.
A3H Encoder overheating
When abnormalities are detected
in the internal part of the absolute
position detector for the
asynchronous system.
Defect in internal circuit of encoder Turn ON the power supply again; if not restored, replace the motor.
AC Servopack Check List for Troubleshooting
Alarm titleAlarm Cause Investigation and corrective actions
NP1MT006Ea
B5H Over speed and multiple
rotations generation abnormality
When abnormalities are detected
in the internal part of the absolute
position detector for the
asynchronous system.
Defect in internal circuit of encoder. Turn ON the power supply again; if not restored, replace the motor.
Malfunction due to noise • Confirm proper grounding of the amplifier.
• Check the shielding of the encoder cable.
• Add ferrite core or similar countermeasures against noise.
Number of motor rotations exceeds the permitted speed. Check the operation pattern and reduce the maximum number of
rotations.
B7H Acceleration abnormality
When abnormalities are detected
in the internal part of the absolute
position detector for the
asynchronous system.
Defect in internal circuit of encoder. Turn ON the power supply again; if not restored, replace the motor.
Malfunction due to noise • Confirm proper grounding of the amplifier.
• Check the shielding of the encoder cable.
• Add ferrite core or similar countermeasures against noise.
The acceleration of motor rotation exceeds the permitted
acceleration
Check the operation pattern and extend the acceleration and
declaration time.
Malfunction due to noise • Confirm proper grounding of the amplifier.
• Check the shielding of the encoder cable.
• Add ferrite core or similar countermeasures against noise.
B2H Encoder abnormalities 2
When abnormality is detected in
the internal part of the absolute
position detector (RA062M) of
the Manchester system.
Defect in internal circuit of encoder Turn ON the power supply again; if not restored, replace the motor.
Malfunction due to noise • Confirm proper grounding of the amplifier.
• Check the shielding of the encoder cable.
• Add ferrite core or similar countermeasures against noise.
B3H
B4H
B6H
Absolute encoder rotations
counter abnormality
Absolute encoder 1 rotation
counter abnormality
Encoder memory error
When abnormalities are detected
in the internal part of the absolute
position detector for the
asynchronous system.
Defect in internal circuit of encoder. Turn ON the power supply again; if not restored, replace the motor.
Part 5 Chapter 1 Servo System Troubleshooting
Edition 3.0 5-1-11 XP-142E Mechanical Reference