MAN00000772_SI-G200BB_SVCPDFA.pdf - 第287页
Adjustment HLGB-10401-01 Matching of X Axis Z-Phase SHEET 1/3 Matching of X Axis Z-Phase This section describes a pr ocedure to adjust a position of the Z-Phase so that the motor stops at a position (Z-Phase setting posi…
Calibration
HLGB-10317-01
Parts Discard Position Adjustment
SHEET
1/1
Parts Discard Position Adjustment
Perform this working on both heads on the front side and rear side.
[Procedure]
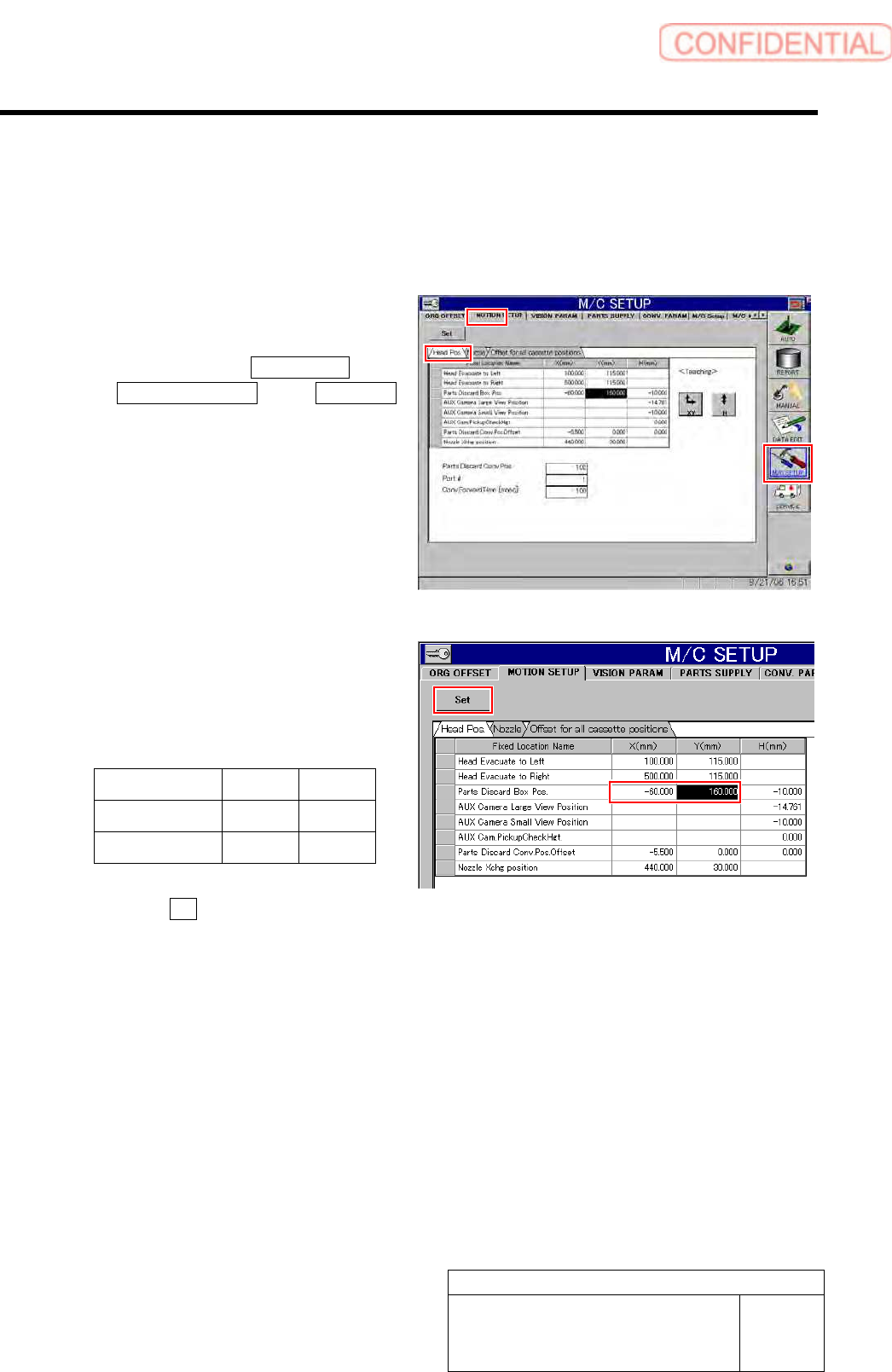
1 Display a motion setup screen for head
position.
1. Click in an order of M/C SETUP menu
MOTION SETUP tab Head Pos.
tab.
2 Change the X, Y values of the Parts Discard
Box Position.
1. Input the following values into the
setting space of the Parts Discard Box
Position.
X Y
Front side PC -60.0 160.0
Rear side PC 60.0 -180.0
2. Click the Set button.
Adjustment
HLGB-10401-01
Matching of X Axis Z-Phase
SHEET
1/3
Matching of X Axis Z-Phase
This section describes a procedure to adjust a position
of the Z-Phase so that the motor stops at a position
(Z-Phase setting position) where the ORG sensor
detects the dog, then moves to the X-CCW sensor side
(left side) by 5 ±2 mm when origin return is performed,
by taking X axis on the front head side as an example.
Also match the Z-Phase for the X axis of the rear head
side by the same procedure.
[Procedure]
1 Perform origin position return of the unit.
1. Close the front and rear doors in order
to prevent danger.
2. Prepare to press the emergency stop
switch so as to immediately stop the
unit.
3. Press the [ORG] button on the
operation panel.
Origin position return is performed.
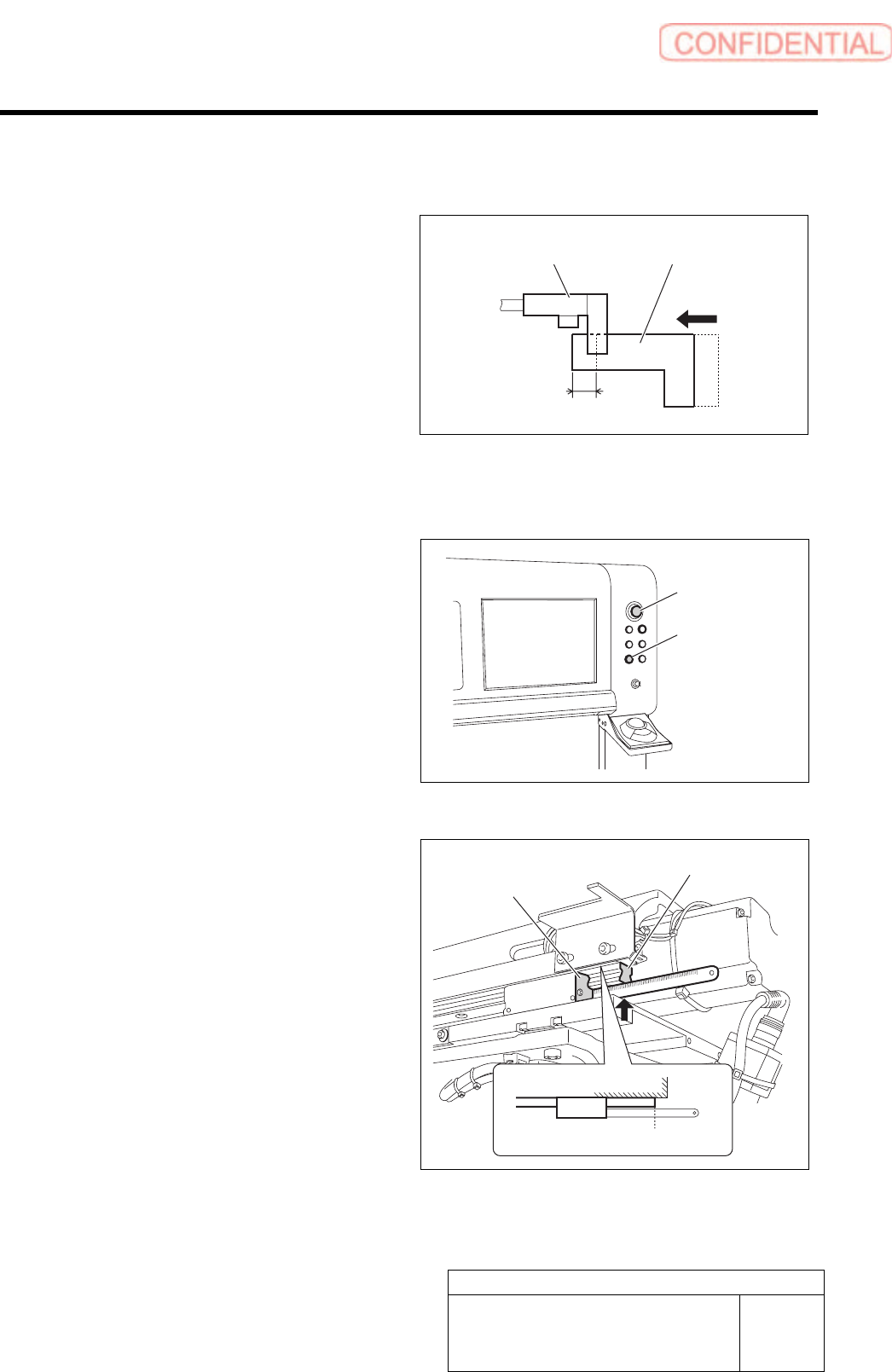
2 Measure the present Z-phase position.
1. Measure the distance from the LM
guide rail end to the LM guide face on
the left side of the unit with a scale.
Suppose that the measured value is A.
(Example : 23.5 mm)
3 Press the emergency stop switch.
Servo is turned off.
ORG sensor Dog
5 mm
Emergency stop
switch
ORG button
A (23.5 mm)
LM guide face
LM guide rail end
LM
Adjustment
HLGB-10401-01
Matching of X Axis Z-Phase
SHEET
2/3
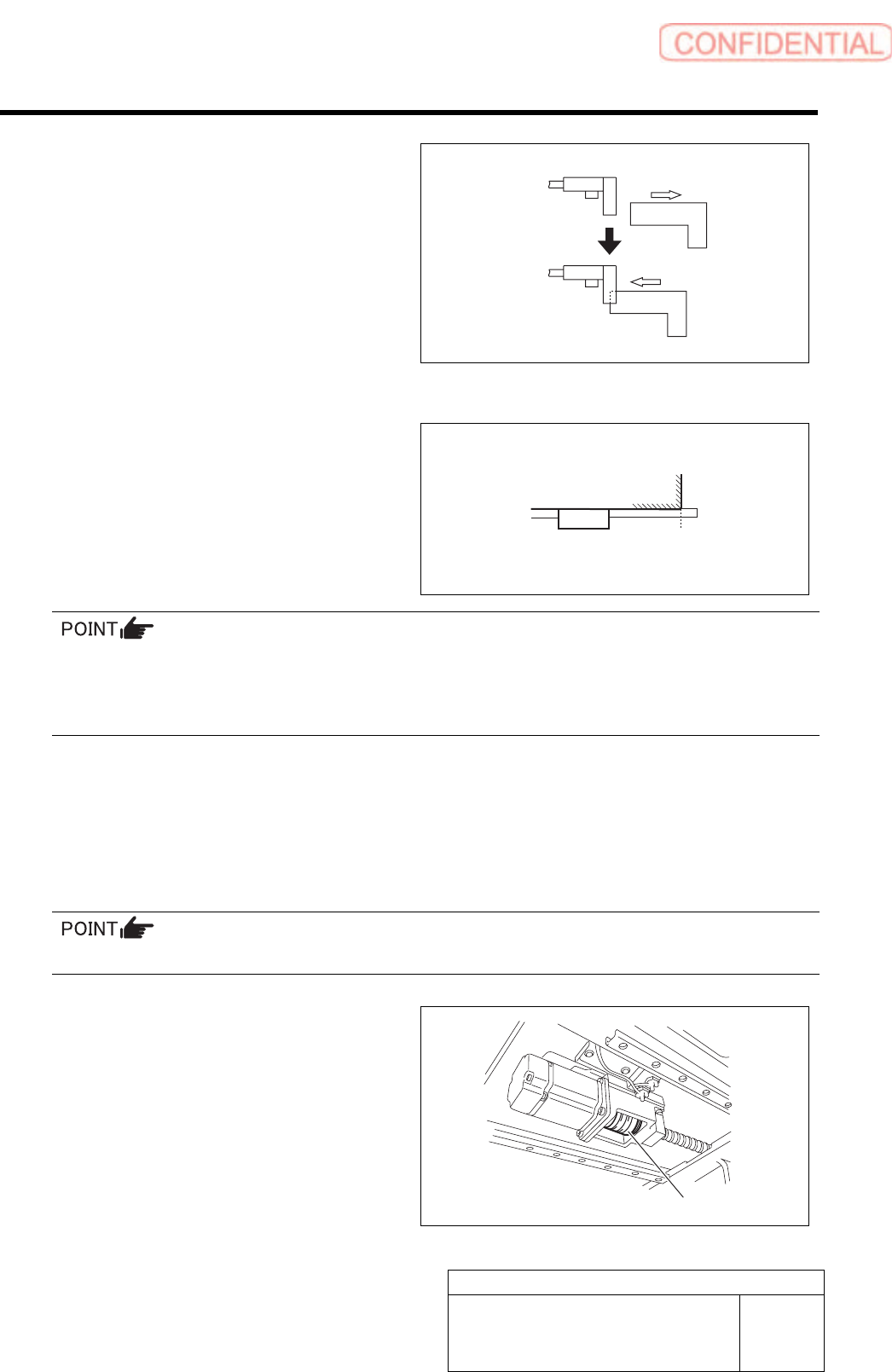
4 Stop the X axis at the boundary position
where the ORG sensor LED in extinguished
condition lights up.
1. Manually move the X axis in right
direction to the position where the dog
leaves the ORG sensor.
2. Manually move the X axis in left
direction little by little and stop at the
boundary position where the ORG
sensor LED in extinguished condition
lights up.
5 Measure the dog detection position of the
ORG sensor.
1. Measure the distance from the frame
end face to the LM guide face on the
left side of the unit with a scale.
Suppose that the measured value is B.
(Example : 31.5 mm)
By 2 times of measurements, the amount of movements from the dog detection position of an ORG sensor
to the present Z-phase position can be found.
Suppose that the present amount of movement is C.
Example : A (23.5 mm) - B (31.5 mm) = C (-8 mm)
6 The difference between the present mount of movement and the amount of Z-phase setup
movement “5 mm” is searched for. Suppose that this difference is D.
Example : Present amount of movement (-8 mm) + Amount of Z-phase movement (5 mm)=D (-3 mm)
Since the present amount of movements is too as large as -8 mm, the adjustment made small 3 mm is required of this example.
7 Adjust the Z-phase setup position.
Adjust the Z-phase setup position by adjusting the positional relation between the motor and ball screw.
1. Move the head to the center of X axis
to secure working space to loosen the
coupling screws.
2. Loosen the screw M4 on the ball screw
side of the coupling.
3. Measure the distance from the LM
guide rail end to the LM guide face
with a scale. (Example : 235 mm)
Suppose that this measured value is E.
E (235 mm) - D (-3 mm) = Target dimension (238 mm)
B (31.5 mm)
Extinguished
Lights-up
LM
Coupling