Schmtic_NXT_03_.pdf - 第4页
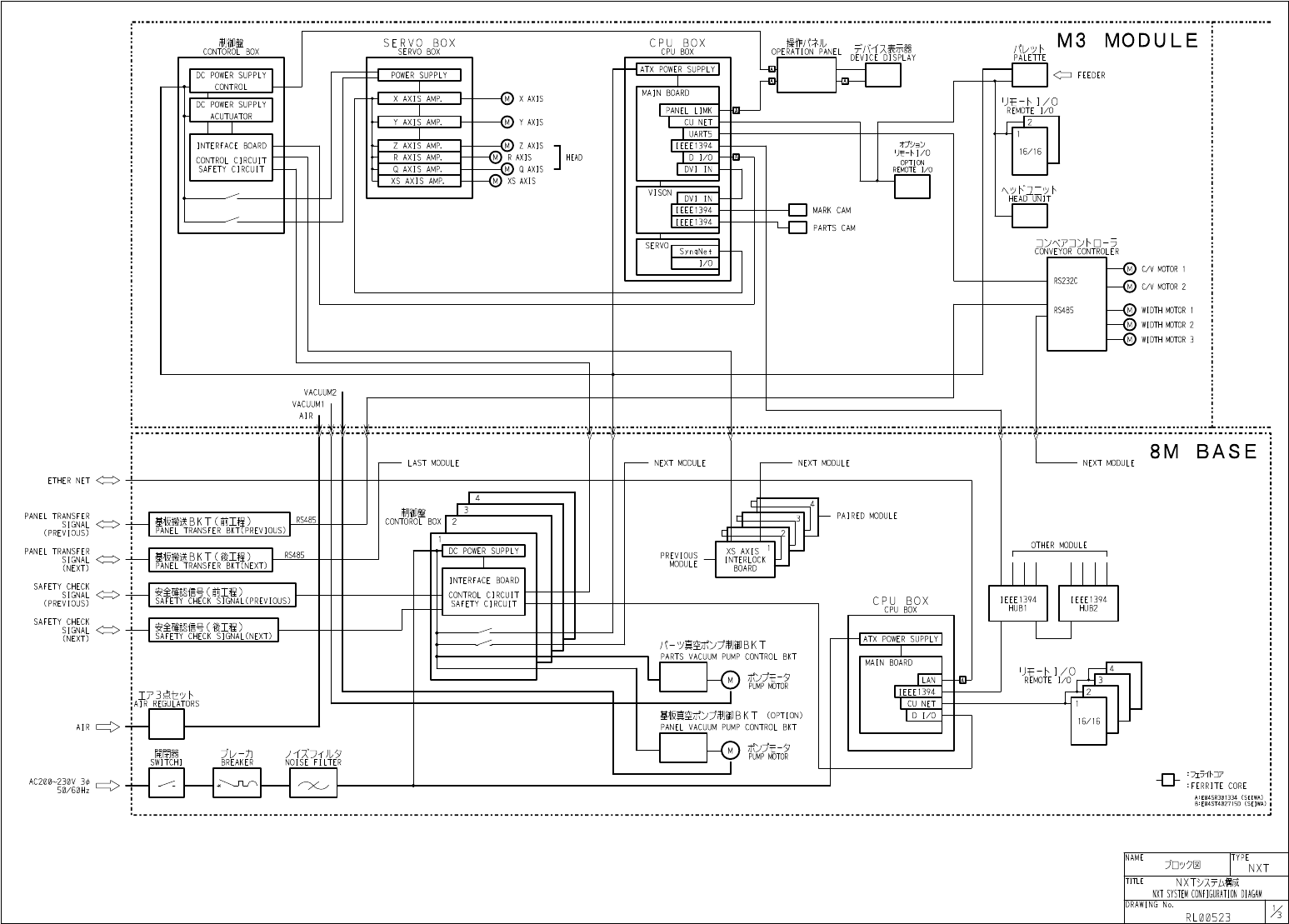
M 3 M O D U L E 隨 OPESKNEL C P U B O X CPU BOX S E R V O B O X SERVO BOX 雜爾丫 1 ATX POWER SUPPLY | Ha ] P O W E R SUPPLY | < C ^ FEEDER DC POWER SUPPLY CONTROL H 3 ^ MAIN BOARD o X AXIS AMP . X AXIS U K 0 DC POWER SUPP…
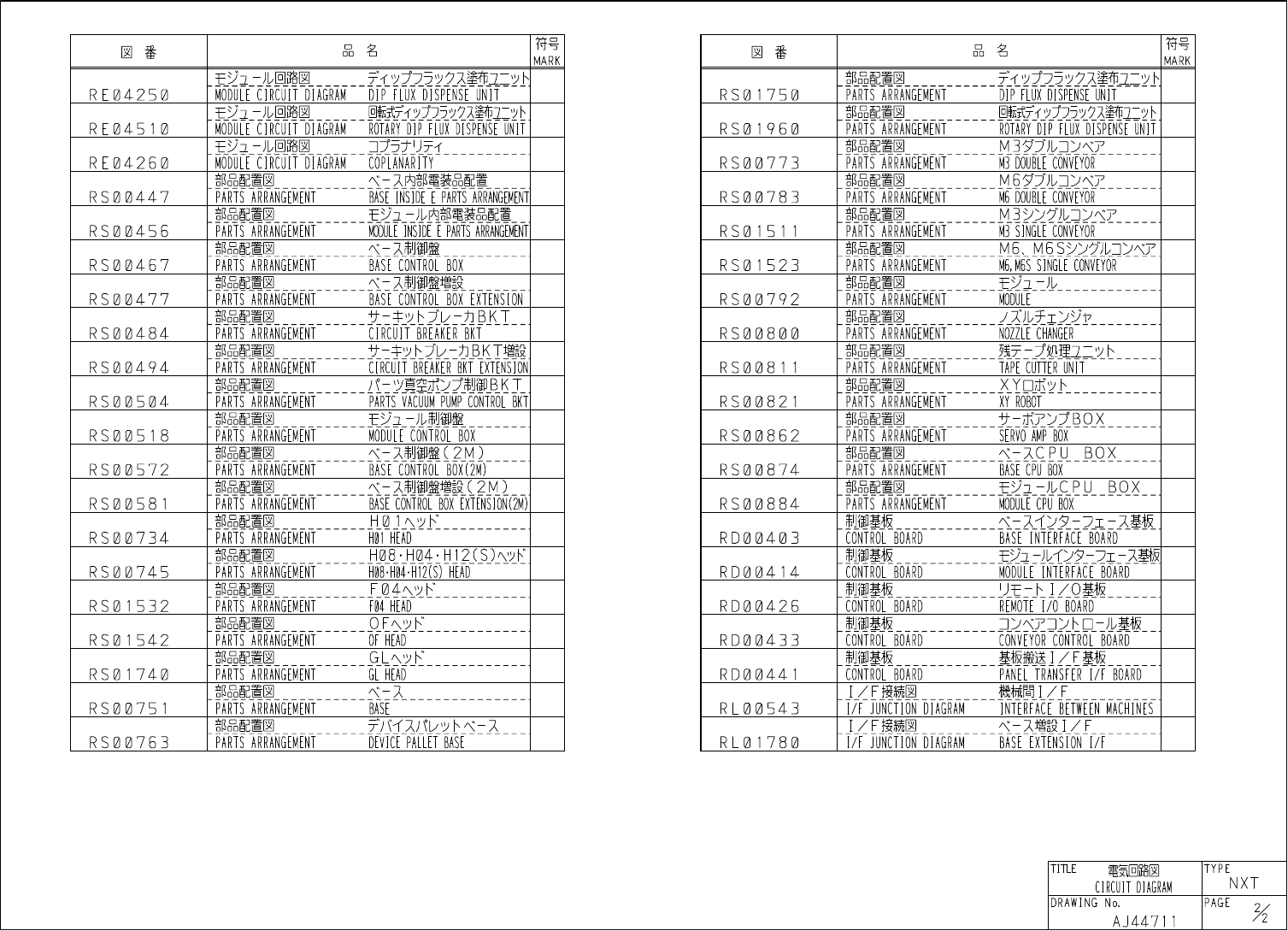
符 号
符 号
品 名
品 名
図 番 図 番
MARK MARK
石 夕
:
!
一 儿回路 図
MM
CIRCUIT
DIAGRAM
DIP
FLUX
DISPENSE
UNIT
litfllNGEMENT
'
R E
0 4 2 5 0
R S
0
1
7 5 0
E
_
H
_
_
HOILT
CT
,
4
-
raMWflilnJfT
p
!
tis
mNGEMETf
R E
0 4 5 1 0
R S
0
1
9 6 0
i
歸
—
端
I
释画
r
—
温
‘
倍
1
-
^
3
DQI
?
E
'
CM
7
~
R E
0 4 2 6 0
R S
0 0 7 7 3
pifsfmNGTMENT
m
mDEtiffilNGMNT
g
暇
!
己 麗
[
§
PA
'
RTS
ARRIGEMENT
'
M
6
DQUBLl
CQNVEY
~
QR
R S
0 0 4 4 7
R S
0 0 7 8 3
MODULE
INSIDE
E
PARTS
ARRANGEMENT
PMTF
'
BNGTMENT
M
3
'
yy
_
^
)
ijy
\
7
_
M
3
SINGLE
CONVEYOR
R
S
0 0
4
5
6
R S
0
1
5
1 1
pifsfmNGTMENT
US
面
PARTS
mNGEMENT
M
6
.
M
6
S
SINGLE
CONVEYOR
R S
0 0 4 6 7
R S
0
1
5 2 3
PMfsTmNGTMENT
m
'
clmlol
EXTENSION
乳 昂
■
己 賃 圍
PA
~
RTS
ARRIGTMENT
'
R S
0 0 4 7 7
R S
0 0 7 9 2
MODULE
pifsllNGEMENT
frrafB
^
rSf
11
PMIFSNGTMENT
趨
NOZZLE
CHANGER
R S
0 0 4 8 4
-
R S
0 0 8 0 0
或
m
涵
T
腿
nb
,
TAPE
CUTTER
UNIT
R S
0 0 4 9 4
R S
0 0 8
1 1
pifsllNGEMETT
'
PARTS
^
fflf
4
Li
T
pitisfmNGTME
'
NT
_
X
_
Y
口
H
XT
ROBOT
R S
0 0 5 0 4
R S
0 0 8 2 1
技
i
:
_
n
MODULE
CONTROL
BOX
PMTsfmNGEMETT
'
fiffp
命画
R S
0 0 5
1
8
R S
0 0 8 6 2
TEzMMIIMI
BASE
CONTROL
BQX
(
2
M
)
_
^
Z
_
CP
_
U
_
_
B
_
OX
BASE
CPU
BOX
R S
0 0 8 7 4
R S
0 0 5 7 2
PA
'
RTS
ARRANGEMENT
乂
—
又 制 御盤增設
(
2
M
)
~
~
¥
srCQNTR
~
QL
BOX
EXTENSION
(
~
2
M
)
乳 每 配 賃
■
PA
~
RTS
ARRlGEMENT
-
t
^
-
JLCPU
BOX
MDOLE
C
~
PU
~
BQX
R S
0 0 5 8 1
R S
0 0 8 8 4
觸 隨
@
PA
"
RTS
ARRANGEMENT
CONllfelR
'
D
IsCJ
^
Lz
ZX
rAS
&
BASE
INTERFACE
BOARD
H
0
1
/
v
〉
K
'
H
0
"
l
HEAD
R S
0 0 7 3 4
-
R D
0 0 4 0 3
H
0 8
-
H
0 4
-
H
1 2
(
S
)
^
K
H
08
-
H
0
rH
12
lS
)
HEAD
:
麵
MODULE
INTERFACE
BOARD
觸 隨
@
PA
~
RTS
ARRANGEMENT
_
_
_
_
_ _
_
CONTROL
BOARD
R S
0 0 7 4 5
R D
0 0 4 1 4
Ut
-
hI
/
O
基 板
RETQTE
T
7
Q
BOARD
m
-
MENT
_
F
_
04
v
^
K
"
F
0
THIAD
~
~~
~
制御基板
mm
BOM
R S
0
1
5 3 2
R D
0 0 4 2 6
gfFii
涵
rr
CONllffilR
'
D
OFW
OFlEAD
上
a
-
jim
.
CONVEYOR
CONTROL
BOARD
R S
0 1 5 4 2
R D
0 0 4 3 3
oRSElgl
PA
"
RTS
ARRANGTMENT
M
麵反
_
_
_
_
_
CONTROL
BOARD
纖麵
I
_
/
_
E
薩
—
PANEL
TRANSFER
1
/
F
BOARD
G
:
Lv
^
_
K
GfHEAD
R S
0 1 7 4 0
RD
00441
音
[
^
岛函己置圍
PAYTS
ARRIGEMETT
_
I
_
/
F
SSM
T
/
F
JUNCTION
"
DIAGRAM
機械間
I
/
F
INTERFACE
"
"
BETWEEN
MACHINES
"
R S
0 0 7 5 1
BASE
R
L
0 0
543
浩
fS
認
GW
I
/
F
接続図
T
7
F
JUNCTION
"
DIAGRAM
乂一又増設
I
/
F
BASE
EXTENSION
I
/
F
DEVICE
PALLET
BASE
R S
0 0 7 6 3
R L
0 1 7 8 0
TITLE
電気回路図
CIRCUIT
DIAGRAM
TYPE
N X T
DRAWING
No
.
PAGE
%
A J
4 4 7 1 1
M
3
MODULE
隨
OPESKNEL
CPU
BOX
CPU
BOX
SERVO
BOX
SERVO
BOX
雜爾丫
1
ATX
POWER
SUPPLY
|
Ha
]
P O W E R
SUPPLY
|
<
C
^
FEEDER
DC
POWER
SUPPLY
CONTROL
H
3
^
MAIN
BOARD
o
X
AXIS
AMP
.
X
AXIS
UK
0
DC
POWER
SUPPLY
ACUTUATOR
|
PANEL
L
1
MK
0
©
I
CU
NET
Y
AXIS
AMP
.
Y
AXIS
|
UART
5
—
©
Z
AXIS
-
i
@
R
AXIS
——
^
7
\
n
AYK
」
才为
3
>
Ut
-
hl
/
O
OPTION
REMOTE
I
/
O
I
IEEE
1394
INTERFACE
BOARD
CONTROL
CIRCUIT
SAFETY
CIRCUIT
Z
AXIS
AMP
.
16
/
16
|
D
I
/
O
-
0
~
R
AXIS
AMP
.
HEAD
|
DVI
IN
Q
AXIS
AMP
.
AXIS
ISS
卜
VI
SON
I
DVI
IN
□
IEEE
1394
MARK
CAM
IEEE
1394
PARTS
CAM
C
^
VSC
^
O
-
LS
SERVO
SynqNet
I
/
O
—
©
C
/
V
^
©
C
/
V
MOTOR
1
RS
232
C
MOTOR
2
—
©
©
RS
485
WIDTH
MOTOR
I
WIDTH
MOTOR
2
WIDTH
MOTOR
3
VACUUM
2
VACUUM
1
AIR
■
■
■
■
■
■
V
'
■
■
■
矚
Ijm
■
■
■
■
■
■
■
■
■
■
"
"
"
"
"
v
"
"
"
"
8
M
BASE
LAST
MODULE
NEXT
MODULE
NEXT
MODULE
NEXT
MODULE
ETHER
NET
<
=
C
>
n
3
4
3
CONTSPBOXH
PAIRED
MODULE
PANEL
TRANSFER
1
3
RS
485
SIGNAL
<
^
>
(
PREVIOUS
)
5
2
OTHER
MODULE
J
DC
POWER
SUPPLY
|
PANEL
TRANSFER
XS
AXIS
INTERLOCK
BOARD
RS
485
證送了謚通
4
U
PREVIOUS
MODULE
SIGNAL
(
NEXT
)
INTERFACE
BOARD
CONTROL
CIRCUIT
SAFETY
CIRCUIT
SAFETY
CHECK
flEM
^
LCPREV
.
OUS
)
SIGNAL
<
=
>
(
PREVIOUS
)
IEEE
1394
IEEE
1394
CPU
BOX
CPU
BOX
HUB
1
HUB
2
SAFETY
CHECK
SIGNAL
<
^
>
(
NEXT
)
ATX
POWER
SUPPLY
八一
、
:
/
真空朮
制御
BKT
PARTS
VACUUM
PUMP
CONTROL
BKT
MAIN
BOARD
4
'
^
OTV
^
O
0
|
LAN
□
3
I
IEEE
1394
2
AfR
^
I
^
RS
|
CU
NET
ID
I
/
O
基板真空
(
OPTION
)
PANEL
VACUUM
PUMP
CONTROL
BKT
16
/
16
AIR
-
Q
織
fo
?
SIMI
■
Jzyil
'
JF
:
FERRITE
CORE
-
□
-
AC
200
230
V
30
50
/
60
Hz
^
>
n
—
A
:
E
04
SR
301334
(
SEIWA
)
B
:
E
045
T
402715
D
(
SEIWA
)
NAME
TYPE
艾口
、
>
夕図
NXT
TITLE
NXT
SYSTEM
CONFIGURATION
DIAGAM
DRAWING
No
.
RL
00523
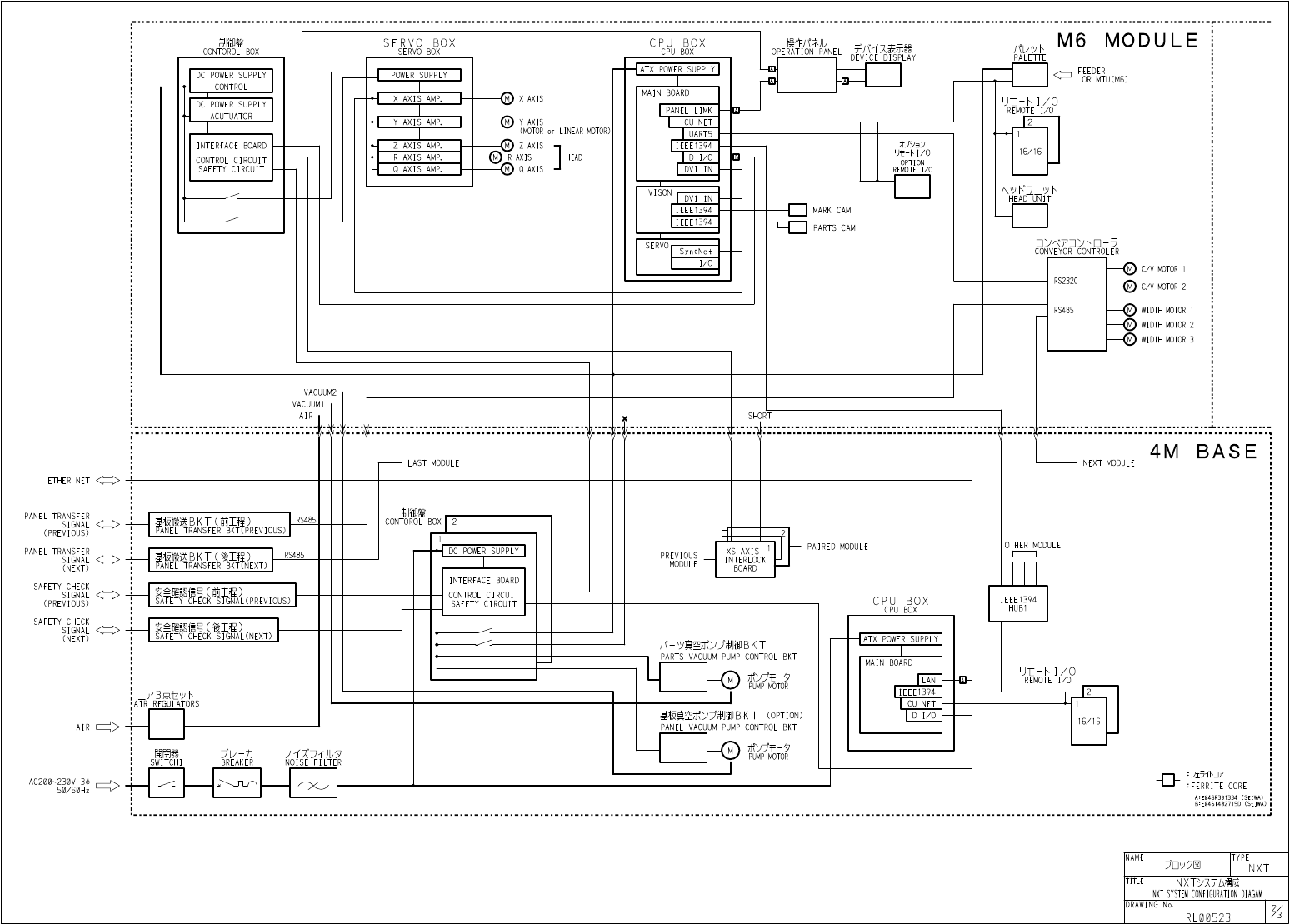
M
6
MODULE
隨
OPESKNEL
CPU
BOX
CPU
BOX
SERVO
BOX
SERVO
BOX
雜爾丫
1
ATX
POWER
SUPPLY
|
Ha
FEEDER
OR
MTU
(
M
6
)
]
P O W E R
SUPPLY
|
<
=
□
DC
POWER
SUPPLY
CONTROL
H
3
^
MAIN
BOARD
o
X
AXIS
AMP
.
X
AXIS
UK
0
DC
POWER
SUPPLY
ACUTUATOR
|
PANEL
L
1
MK
0
©
I
CU
NET
Y
AXIS
AMP
.
Y
AXIS
(
MOTOR
or
LINEAR
MOTOR
)
|
UART
5
—
©
Z
AXIS
-
i
@
R
AXIS
—
©
Q
AXIS
J
才为
3
>
Ut
-
hl
/
O
OPTION
REMOTE
I
/
O
I
IEEE
1394
INTERFACE
BOARD
CONTROL
CIRCUIT
SAFETY
CIRCUIT
Z
AXIS
AMP
.
16
/
16
|
D
I
/
O
-
0
~
R
AXIS
AMP
.
HEAD
|
DVI
IN
Q
AXIS
AMP
.
ISS
卜
VI
SON
I
DVI
IN
□
IEEE
1394
MARK
CAM
IEEE
1394
PARTS
CAM
C
^
VSC
^
O
-
LS
SERVO
SynqNet
I
/
O
—
©
C
/
V
^
©
C
/
V
MOTOR
1
RS
232
C
MOTOR
2
—
©
©
RS
485
WIDTH
MOTOR
I
WIDTH
MOTOR
2
WIDTH
MOTOR
3
VACUUM
2
VACUUM
1
AIR
SHORT
■
V
4
M
BASE
LAST
MODULE
NEXT
MODULE
ETHER
NET
<
=
C
>
CONTSPBOXrr
PANEL
TRANSFER
RS
485
SIGNAL
<
^
>
(
PREVIOUS
)
5
2
OTHER
MODULE
PAIRED
MODULE
J
DC
POWER
SUPPLY
|
PANEL
TRANSFER
XS
AXIS
INTERLOCK
BOARD
RS
485
證送了謚通
4
U
PREVIOUS
MODULE
SIGNAL
(
NEXT
)
INTERFACE
BOARD
CONTROL
CIRCUIT
SAFETY
CIRCUIT
SAFETY
CHECK
flEM
^
LCPREV
.
OUS
)
SIGNAL
<
=
>
(
PREVIOUS
)
IEEE
1394
CPU
BOX
CPU
BOX
HUB
1
SAFETY
CHECK
SIGNAL
<
^
>
(
NEXT
)
ATX
POWER
SUPPLY
八一
、
:
/
真空朮
制御
BKT
PARTS
VACUUM
PUMP
CONTROL
BKT
MAIN
BOARD
'
^
OTV
^
O
0
|
LAN
□
I
IEEE
1394
IrP
1
AfR
^
I
^
RS
|
CU
NET
ID
I
/
O
基板真空
(
OPTION
)
PANEL
VACUUM
PUMP
CONTROL
BKT
16
/
16
AIR
-
Q
織
fo
?
SIMI
■
Jzyil
'
JF
:
FERRITE
CORE
-
□
-
AC
200
230
V
30
50
/
60
Hz
^
>
n
—
A
:
E
04
SR
301334
(
SEIWA
)
B
:
E
045
T
402715
D
(
SEIWA
)
NAME
TYPE
艾口
、
>
夕図
NXT
TITLE
NXT
SYSTEM
CONFIGURATION
DIAGAM
DRAWING
No
.
K
RL
00523