RX-8_使用说明书.pdf - 第51页
第 2 章 系统概要 2- 4. 机器的构成 15 2 2-4- 7. 贴片头部的构成 贴片头的构成如下。 P20 吸嘴贴片头 行星贴片头 吸嘴 20 个 视觉识别摄像机 元件摄像机 吸取检查摄像机 OCC 激光识别 HMS 视觉识别摄像机部 元件摄像机( P 20 吸嘴贴片头 ) 为贴片准确,对吸取元 件进行确认的 摄像机。元件 摄像机机安装 在 XY 方向移动的贴片头上 。利用此 摄像机,在贴片头移动 时识别元件。 吸取 检…

第 2 章
系统概要
2-4.
机器的构成
14
2-4-6.
主要按钮的作用
主断路器
用于供给
/
切断装置电源。
紧急停止开关
本机的紧急停止开关位于本体正面
紧急时按下此开关,动力即被切断,装置驱动部立即停止。
要解除时,将按钮向右旋转。
触屏式监视器
本机的操作输入,通过正面的触屏式监视器画面进行。
有关各操作的详情,请参阅后面讲述的内容。
USB
存储设备插入口(
2
处)
2
处
USB
存储设备插入口都用于在
USB
设备和本机之间交换数据。请勿连接非本公司指定的产品。
主开关
接通或断开本机器的电源。
第 2 章
系统概要
2-4.
机器的构成
15
2
2-4-7.
贴片头部的构成
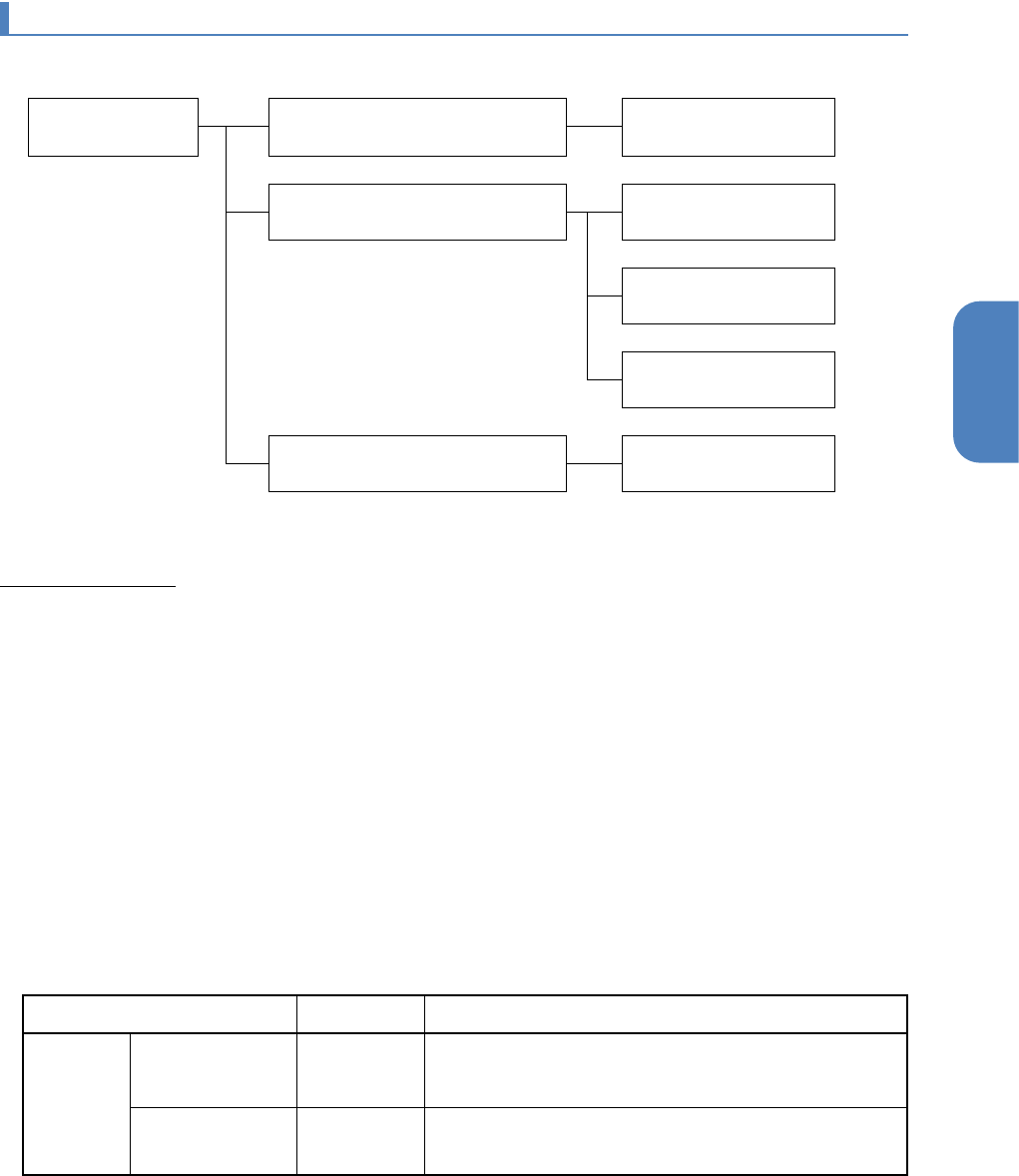
贴片头的构成如下。
P20
吸嘴贴片头
行星贴片头
吸嘴 20 个
视觉识别摄像机
元件摄像机
吸取检查摄像机
OCC
激光识别
HMS
视觉识别摄像机部
元件摄像机(
P20
吸嘴贴片头)
为贴片准确,对吸取元件进行确认的摄像机。元件摄像机机安装在 XY 方向移动的贴片头上。利用此
摄像机,在贴片头移动时识别元件。
吸取检查摄像机
吸取元件时,为了检查吸取状态,从元件侧面进行识别,检查元件高度的摄像机。可检查芯片站立。
采用透射照明。
OCC
本摄像机可进行基板姿势补正,带式供料器吸取位置补正,识别确定元件贴片位置的基准
——
BOC 标
记位置和坏板标记。采用反射照明。
对元件的视觉识别摄像机,照明方式和元件之间有以下限制条件。
摄像机种类(高速贴片头)
照明方式
元件识别条件
标准装备 元件摄像机
(元件识别)
反射照明
0402 mm
以上
~□
5 mm
以下(无角度限制)
元件高度
3mm
以下
吸取检查
摄像机
透射照明 元件高度
0.1 mm
~
3 mm
以下
第 2 章
系统概要
2-4.
机器的构成
16
本机有
4
种元件识别方式。各种识别方式和识别对象元件的关系如下表所示。
识别方式
对象元件
芯片
反射
基本轮廓无凹凸的
四方形元件
・矩形芯片元件
引脚
(基本上对引脚根数
无限制)
・晶体管、二极管、
SOP
、
QFP
球
反射
球状的电极为格子状排列
的元件
・
BGA
、
CSP
元件
异形
反射
外形无规则性的元件
・连接器等
注意
•
反射识别时,可能因光亮情况而无法识别。
•
连接器类,基本可识别出引脚元件,但有时也有一部分无法识别。
激光识别
HMS
用于检测基板弯曲和对带式供料器吸取高度进行补正的传感器。
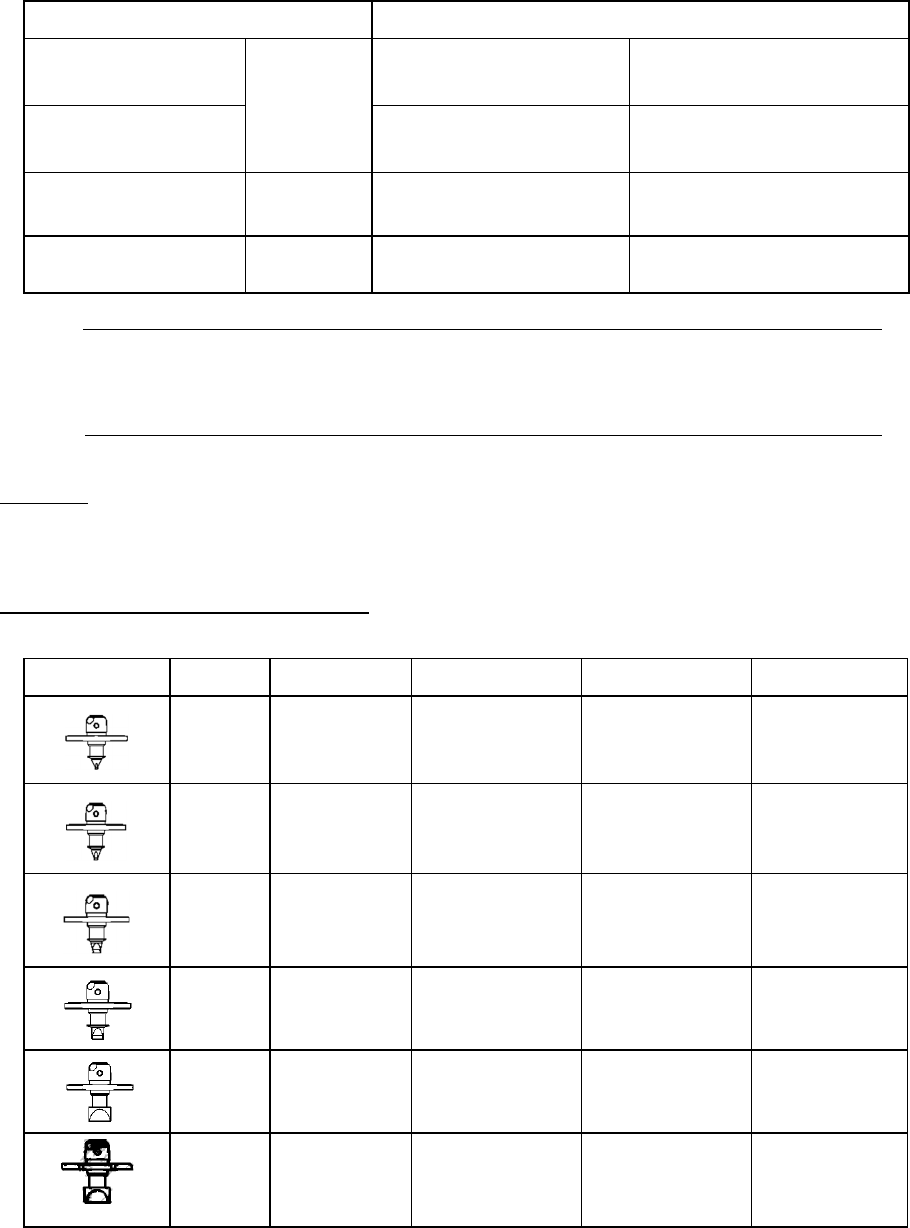
P16/P16S/P20
吸嘴贴片头用吸嘴种类
反射方式方形吸嘴
形状
吸嘴
ID
名称
吸嘴外径
吸嘴内径
对象元件
501 HF0402R(C)
0.4mm×0.3mm
(长方形)
0.08mm
(
X
型)
0402
502 HF0603R(C)
0.6mm×0.3mm
(长方形)
0.2mm
(
2
孔)
0603
503 HF1005R(C)
1.0mm×0.5mm
(长方形)
0.4mm 1005
512 HF1608R
1.6mm × 0.8mm
(长方形)
0.7mm 1608
521 HF3008R
3.0mm × 0.8mm
(长方形)
1.6mm x0.4mm
(长孔)
LED
(
侧视
)
等
524 HF3216R
3.2mm × 1.6mm
(长方形)
1.2mm 3216