AX501维修手册.pdf - 第625页
4022 593 52701/1 × 1 08.01 AX-301/501 AX-3/5 D.77 D06.fm D6 D6.2 机械臂,调节打开高度 1. 打开机械臂。 • 1 注: …
D6
4022 593 52701/1
×
1
D.76 AX-301/501 AX-3/5 08.01
D06.fm
IRQ 活动监控 (IRQs ACTIVITY MONITORING)
INTR Primary INTR [ ON ]
IRQ3 (COM 2)
[ Enabled ]
IRQ4 (COM 1)
[ Enabled ]
IRQ5 (LPT 2)
[ Enabled ]
IRQ6 (Floppy Disk)
[ Enabled ]
IRQ7 (LPT 1)
[ Enabled ]
IRQ8
RTC
RTC Alarm
[ Disabled ]
IRQ9
IRQ2
IRQ2 Redir
[ Disabled ]
IRQ10 Reserved [ Disabled ]
IRQ11 Reserved [ Disabled ]
IRQ12
PS/2
PS/2 Mouse
[ Enabled ]
IRQ13
Coprocessor
[ Enabled ]
IRQ14 Hard Disk [ Enabled ]
IRQ15 Reserved
[ Disabled ]
PnP/PCI 配置 (PnP/PCI CONFIGURATIONS)
Reset Configuration data
[ Disabled ]
Resources Controlled By
[ ESCD Auto (ESCD) ]
IRQ IRQ Resources
[ Press Enter ]
DMA
DMA Resources
[ Press Enter ]
PCI VGA
PCI/VGA Palette Snoop
[ Disabled ]
VGA IRQ
Assign IRQ For VGA
[ Disabled ]
USB IRQ
Assing IRQ For USB
[ Disabled ]
4022 593 52701/1
×
1
08.01 AX-301/501 AX-3/5 D.77
D06.fm
D6
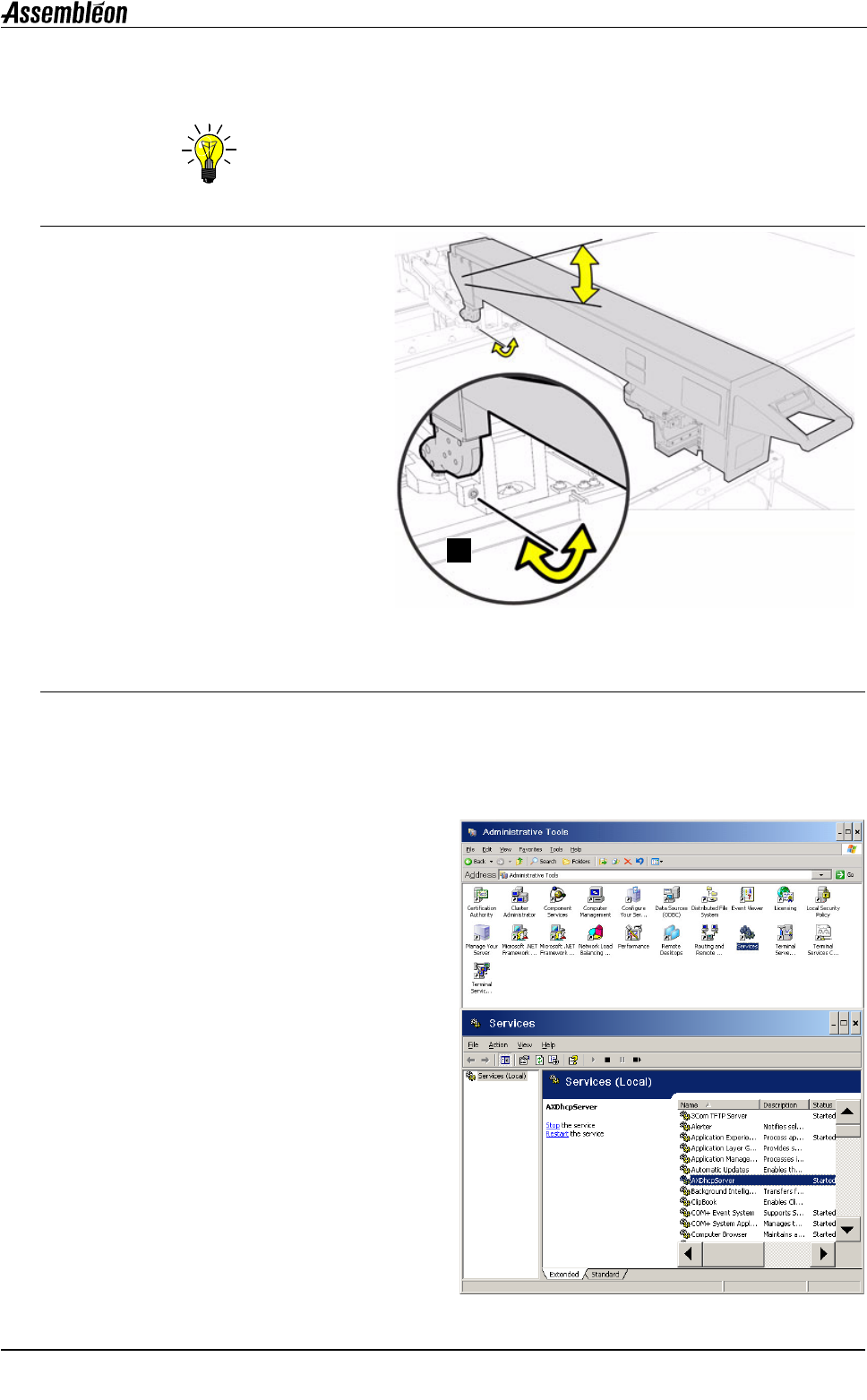
D6.2 机械臂,调节打开高度
1. 打开机械臂。
• 1
注:
Loctite
Loctite
D6.3 机械臂上的中继电路板,载入校准数据
1. 前提
• Administrator A5.3.1.1
2. 启动 DHCP 服务器。
•
start
-
Settings
-
Control
panel
-
Administrative tools
-
Services
• AXDhcpserver
Started
•
注: 2
AXDhcpserver
1
D6
4022 593 52701/1
×
1
D.78 AX-301/501 AX-3/5 08.01
D06.fm
3. 选择贴装控制器
• Start programs VNC
VNC viewer
• ID
•
pp1 pp20
注: 标准
11 pp12
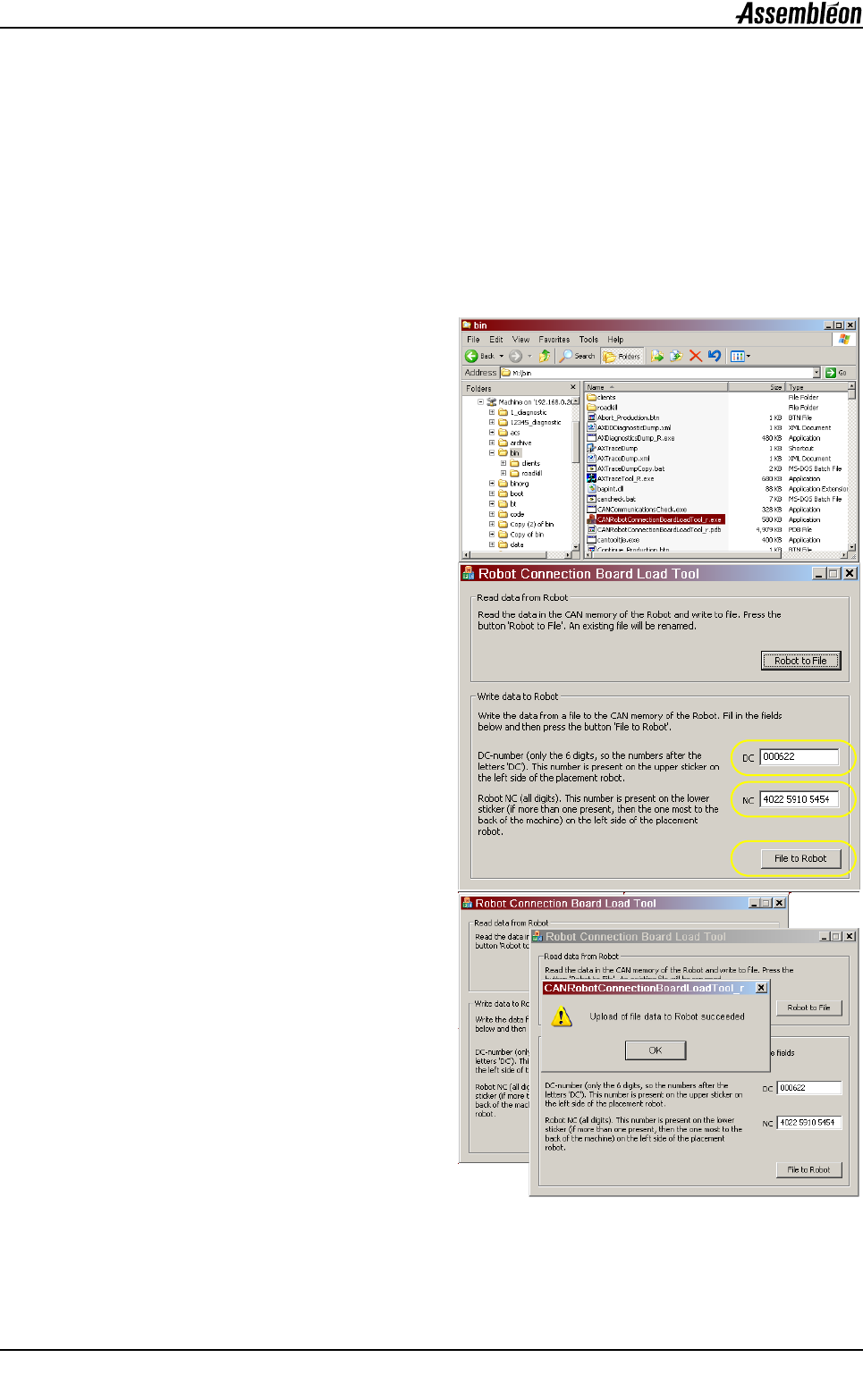
4.
启动“
CAN
机械臂中继电路板载入工具(
CAN
Robot Connection Board Load Tool
)”
•
CAN
CAN
Robot Connection Board Load Tool
•
CANRobotConnectionBoardLoadTool_r.exe
• DC
NC
注: 0 DC
NC
• File to Robot