00195776-0102_UM_D3_KO.pdf - 第133页
사용자 매뉴얼 SIPLACE D3 3 장비에 대한 기술 데이터 소프트웨어 버전 SR.605.xx 2008 년 7 월 한글판 3.8 비전 시스템 133 3. 8 비전 시스템 3.8.1 구조 컴포넌트 카메라는 각 Collect&Pla ce 헤드에 통합됩니다 ( 108 페이지에 있는 그림 3.5 - 2 및 112 페이지에 있는 그림 3.5 - 4 참조 ). Twin Head 용 유형 33(…
3 장비에 대한 기술 데이터 사용자 매뉴얼 SIPLACE D3
3.7 PCB 컨베이어 시스템 소프트웨어 버전 SR.605.xx 2008 년 7 월 한글판
132
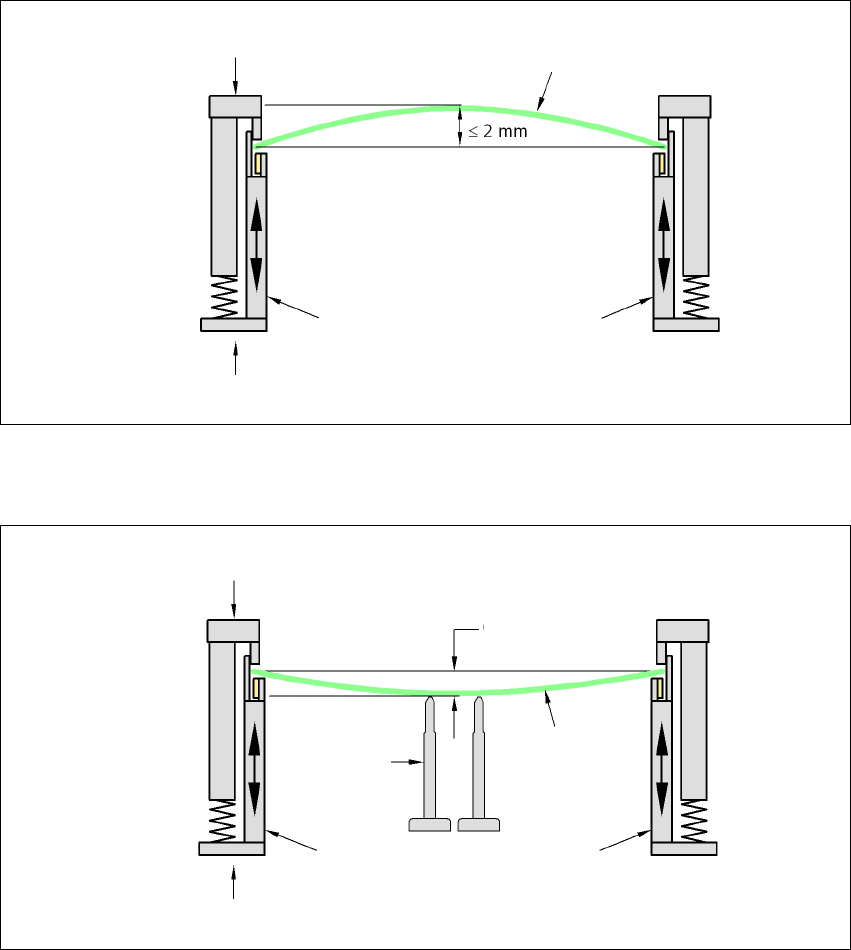
3.7.7.2 실장 중 PCB 휨
2 mm 의 휨이 발생하는 경우 PCB 중간에서 로컬 피듀셜과 잉크 스폿에 초점을 맞추는 데 문제
가 발생할 수 있습니다 . 디지털 카메라의 초점 거리는 2 mm 입니다 . 모든 허용 오차를 고려했
을 때 이 값은 1.5 mm 로 줄어듭니다 . 컴포넌트 높이가 휨에 의해 줄어든다는 점도 참고하십시
오.
3
3
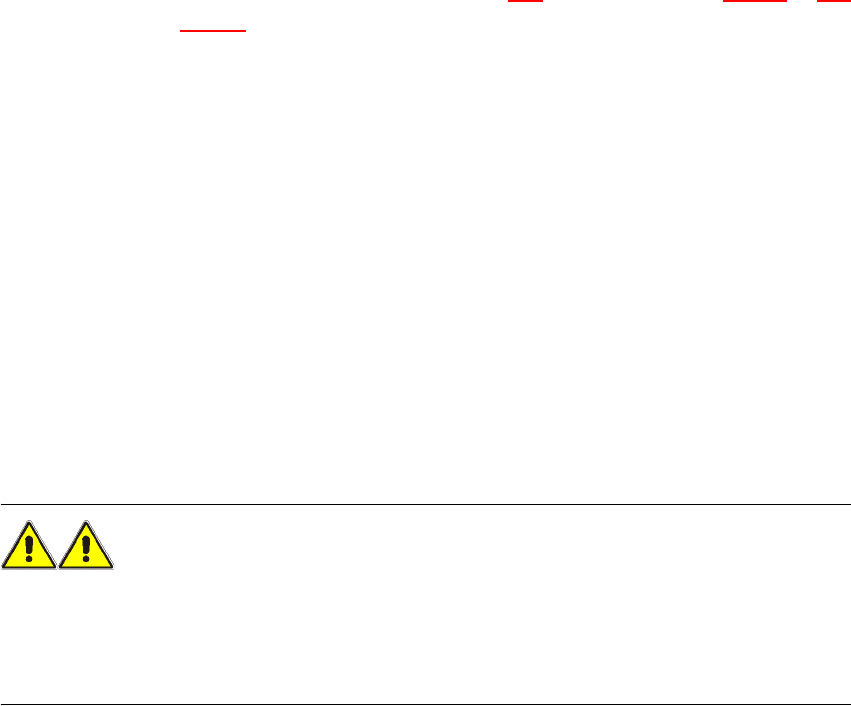
PCB 아래로 휨 최대 0.5 mm
3
→ 자성 핀 지지물을 사용하여 이 값을 얻습니다 .
이동식 고정 장치
클램프로 고정된 가장자리
인쇄 회로 보드
컨베이어 측면 벽
인쇄 회로 보드
자성 핀
지지물
이동식 고정 장치
클램프로 고정된 가장자리
컨베이어 측면 벽
0.5 mm
사용자 매뉴얼 SIPLACE D3 3 장비에 대한 기술 데이터
소프트웨어 버전 SR.605.xx 2008 년 7 월 한글판 3.8 비전 시스템
133
3.8 비전 시스템
3.8.1 구조
컴포넌트 카메라는 각 Collect&Place 헤드에 통합됩니다 (108 페이지에 있는 그림 3.5 - 2 및 112
페이지에 있는 그림 3.5 - 4 참조 ). TwinHead 용 유형 33(55x45) 고정식 디지털 P&P 컴포넌트
비전 카메라는 장비 프레임에 영구적으로 장착되어 있습니다 .
컴포넌트 비전 모듈은 다음 사항을 확인하는 데 사용합니다 .
– 노즐에서 컴포넌트의 정확한 위치
– 패키지 폼의 외형
PCB 비전 모듈은 PCB 상의 피듀셜을 사용하여 다음 사항을 확인합니다 .
– PCB 위치
– 회전 각
– PCB 비틀림
PCB 카메라는 갠트리 아래에 장착되어 있습니다 . 이 카메라는 피더 모듈에 있는 피듀셜을 이용
하여 컴포넌트의 정확한 픽업 위치를 파악하는데 , 이러한 정확한 픽업 위치는 소형 컴포넌트의
경우 특히 중요합니다 .
경고
헤드 충돌 위험 3
실장 헤드를 TwinHead 에서 Collect&Place 헤드로 바꾸면 TwinHead 의 컴포넌트 비전 카메라
( 고정식 , P&P, 유형 33(55 x 45) 및 유형 25(16 x 16)) 를 떼어내야 합니다 . 그렇지 않으면
Collect&Place 헤드가 이 카메라 케이스와 충돌하게 됩니다 .
3 장비에 대한 기술 데이터 사용자 매뉴얼 SIPLACE D3
3.8 비전 시스템 소프트웨어 버전 SR.605.xx 2008 년 7 월 한글판
134
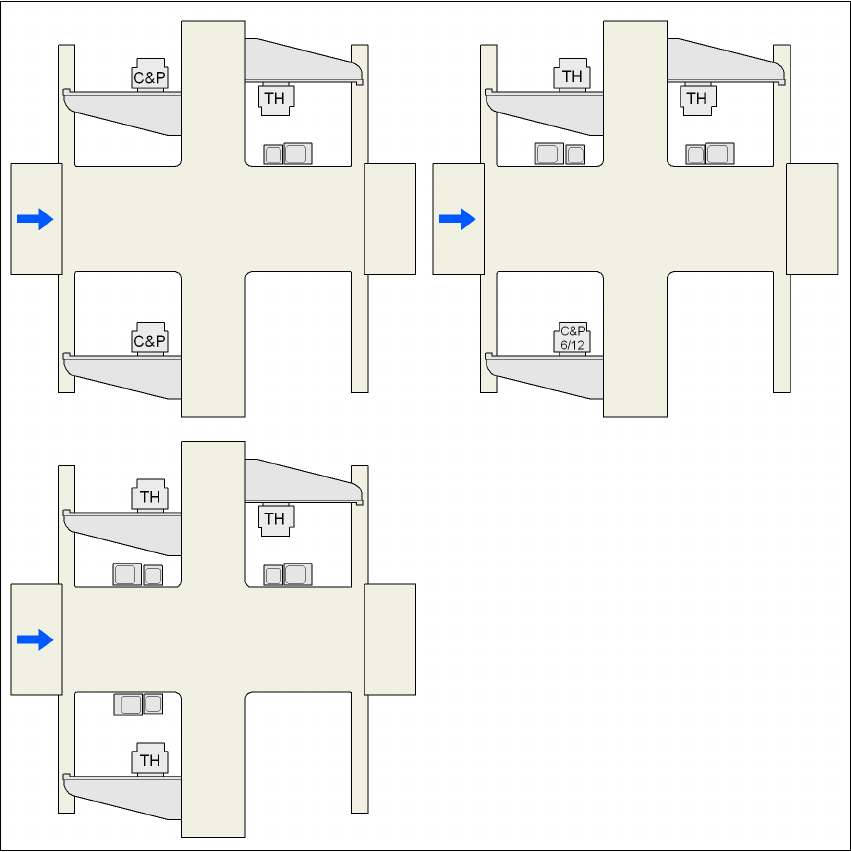
3.8.2 고정식 카메라의 조립 위치 - IC 및 FC 카메라
3
그림 3.8 - 1 장비의 IC 및 FC 카메라
C&P C&P12 또는 C&P6
C&P6/12 6- 세그먼트 Collect & Place 헤드 또는 12- 세그먼트 Collect & Place 헤드
TH TwinHead
25 FC 카메라 , 유형 25
33 IC 카메라 , 유형 33
G1, G3, G4 갠트리 1, 갠트리 3, 갠트리 4
33 또는 25
25 및 33
25 및 33 33 및 25 25 및 33
33 또는 25
G3
G3
G4
G4
G1
G1
G4
G3
G1