00195940-03-UM SiplaceCA-DE.pdf - 第182页
3 Technische Daten Betriebsanleitung SIPLACE CA-Ser ie 3.8 Bestückköpfe Ausgabe 08/2011 DE 182 3 Abb. 3.8 - 4 20-Segment-Collect&Place-CA-Kopf - Funktionsgruppen T e il 2 (1) BE-Kamera C&P , T yp 23, 6 x 6, dig i…
Betriebsanleitung SIPLACE CA-Serie 3 Technische Daten
Ausgabe 08/2011 DE 3.8 Bestückköpfe
181
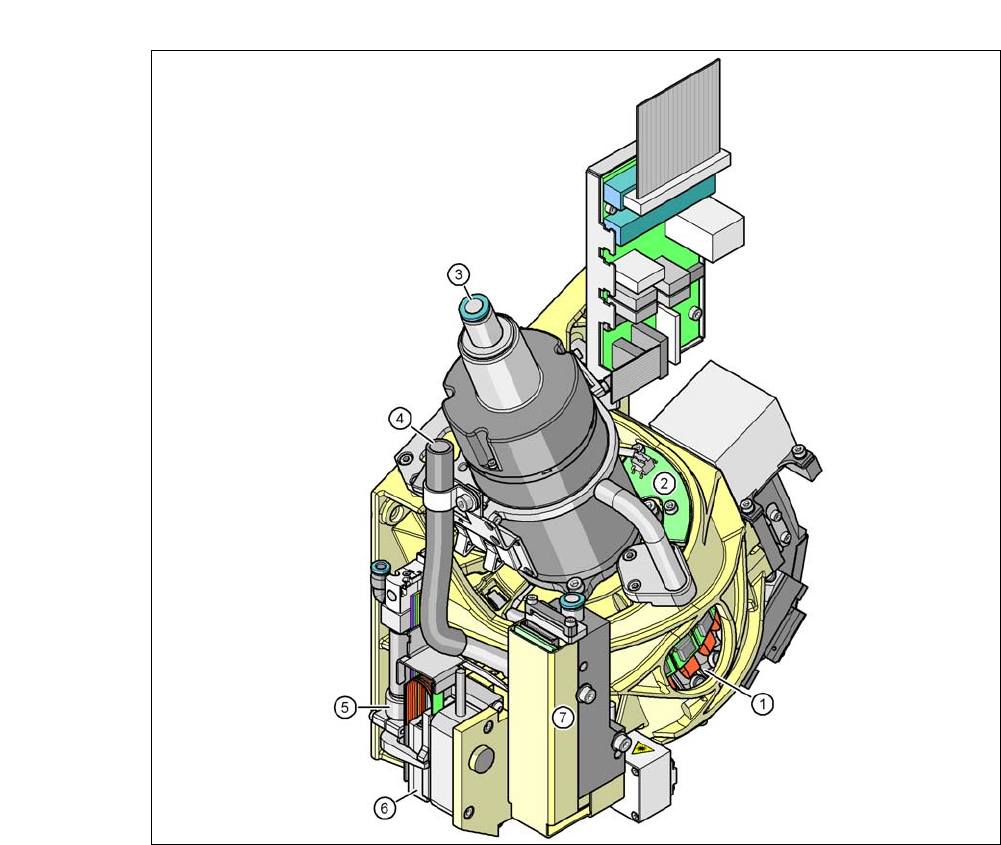
3.8.3 20-Segment-Collect&Place-CA-Kopf
3
Abb. 3.8 - 3 20-Segment-Collect&Place-CA-Kopf - Funktionsgruppen Teil 1
(1) DP-Antrieb, 20 Antriebe
(2) Platine "Vakuumsensor Haltekreis"
(3) Druckluftanschluss für 20 Venturidüsen des Abhol-/Bestück- und Haltekreises
(4) Leitung für die Abluft des Druckregelventils (7)
(5) Rückholzylinder
(6) Z-Motor (Linearmotor)
(7) Druckregelventil
3 Technische Daten Betriebsanleitung SIPLACE CA-Serie
3.8 Bestückköpfe Ausgabe 08/2011 DE
182
3
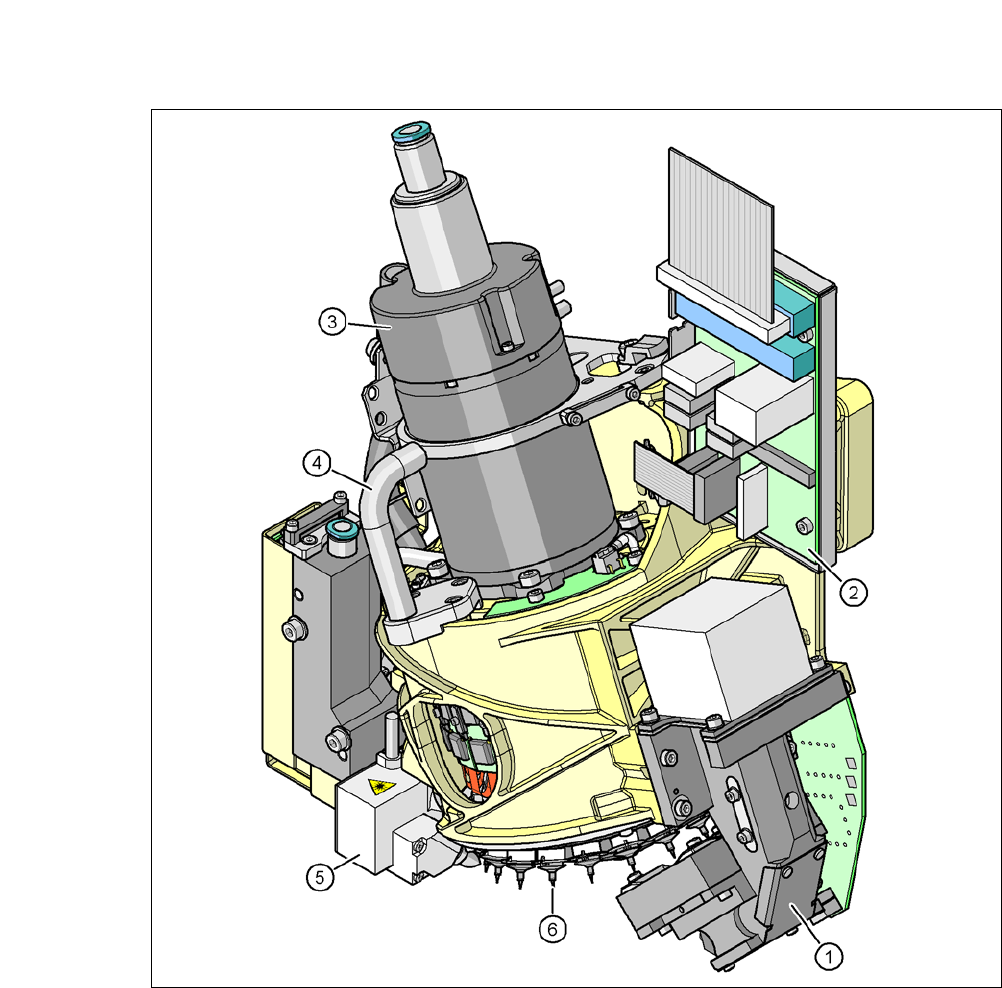
Abb. 3.8 - 4 20-Segment-Collect&Place-CA-Kopf - Funktionsgruppen Teil 2
(1) BE-Kamera C&P, Typ 23, 6 x 6, digital
(2) Zwischenverteiler-Platine
(3) Sternmotor
(4) Griff
(5) BE-Sensor
(6) Stern mit 20 Pipetten
Betriebsanleitung SIPLACE CA-Serie 3 Technische Daten
Ausgabe 08/2011 DE 3.8 Bestückköpfe
183
3.8.3.1 Beschreibung
Der 20-Segment-Collect&Place-CA-Kopf arbeitet nach dem Collect&Place-Prinzip, d. h. inner-
halb eines Zyklus werden zwanzig Bauelemente vom Bestückkopf abgeholt. Der BE-Sensor über-
prüft an der Bestück-/Abholposition, ob ein Bauelement von der Pipette aufgenommen wurde. Auf
dem Weg zur Bestückposition werden die Bauelemente optisch zentriert und in die erforderliche
Bestücklage gedreht. Danach werden sie mit Blasluft sanft und positionsgenau auf die Leiterplatte
abgesetzt.
Mit dem Bestückkopf C&P20CA gelang es, die Leistung des Bestückkopfes und damit zugleich
des Bestückautomaten erheblich zu steigern. Die kompakte Bauweise des C&P20CA-Kopfes er-
möglicht sehr kurze Zykluszeiten. Dabei steht die Sternachse schräg zur Leiterplattenebene. Mit
dieser Geometrie lassen sich die Segmente auf engstem Raum anordnen.
Die BE-Kamera ist weiterhin in den C&P20CA-Kopf integriert. Dies spart zusätzliche Fahrwege
zu externen Zentrierkameras. Zudem besitzt jedes Segment einen eigenen DP-Antrieb zum Ro-
tieren der Pipette. Die Pipetten werden deshalb nicht mehr an einer einzigen Kopfstation in die
richtige Lage gedreht. Sie können jederzeit und unabhängig voneinander in ihre Bestücklage ge-
dreht werden.
Jedes Segment verfügt über einen eigenen Vakuumerzeuger. Die Umschaltzeiten zwischen Va-
kuum und Blasluft ließen sich damit erheblich verkürzen. Zudem kann im Haltekreis für jede ein-
zelne Pipette eine Vakuumprüfung durchgeführt werden.
Der Z-Antrieb der Segmente ist mit einem Linearmotor mit linearem Wegmesssystem realisiert
und damit überaus präzise. In der Abhol-/Bestückposition verfährt der Z-Antrieb die Segmente in
vertikaler Richtung nach unten bzw. nach oben.