00197332-01_UM_D1i_D2i_SR605_FR.pdf - 第128页
3 Caractéristiques techniques de l'automat e Manuel d'utilisa tion SIPLACE D1i/D2i 3.8 Système de convoyage des CI A partir de la ve rsion du logiciel SR.605.03 SP2 Edition 10/2012 FR 128 3.8 Système de convoya…
Manuel d'utilisation SIPLACE D1i/D2i 3 Caractéristiques techniques de l'automate
A partir de la version du logiciel SR.605.03 SP2 Edition 10/2012 FR 3.7 Système de portiques
127
L'axe Y se compose pour l'essentiel des blocs principaux suivants:
– Commande linéaire Y avec aimant permanent (pos. 5 dans la Fig. 3.7 - 3
, page 126) et pla-
que d'adaptation (pos. 3 dans la Fig. 3.7 - 3
, page 126)
– Système de guidage Y (pos. 4 dans la Fig. 3.7 - 3
, page 126)
– Système de mesure Y (pos. 6 dans la Fig. 3.7 - 3
, page 126)
L'axe Y est entraîné par un moteur linéaire. La partie secondaire de la commande se compose
d'aimants permanents et est montée sur le montant de la machine. La partie principale est vissée
avec le portique (plaque d'adaptation). Un montage anticrash limite les trajectoires de déplace-
ment des portiques l'un envers l'autre.
3.7.5 Caractéristiques techniques de l'axe Y
Commande Moteur linéaire, direct
Vitesse Max. 2,5 m/s
Trajectoire de déplacement du portique, SIPLACE D1i
Portique 1: du centre de la machine jusqu'à l'emplacement 1
Portique 1: du centre de la machine jusqu'à l'emplacement 2
+ 778 mm
- 801 mm
Trajectoire de déplacement du portique, SIPLACE D2i
Portique 1: du centre de la machine jusqu'à l'emplacement 1
Portique 2: du centre de la machine jusqu'à l'emplacement 2
+ 795 mm
+ 677 mm
Système de mesure de la trajectoire Echelle métallique linéaire
Longueur de l'échelle 1950 mm
Résolution 1 m
3 Caractéristiques techniques de l'automate Manuel d'utilisation SIPLACE D1i/D2i
3.8 Système de convoyage des CI A partir de la version du logiciel SR.605.03 SP2 Edition 10/2012 FR
128
3.8 Système de convoyage des CI
L'automate est équipé en standard du convoyeur simple de CI. Le convoyeur double de CI est
livrable en option départ usine (voir Section 3.8.7
, page 136). Suivant les besoins, vous pouvez
choisir le côté gauche ou droit du convoyeur de CI en tant que côté de convoyage fixe.
Les bandes transporteuses sont commandées par des moteurs à courant continu. Dans la zone
de travail se trouve la table de levage, destinée à bloquer les circuits imprimés. La largeur du
convoyeur de CI se règle grâce à l'interface utilisateur ou se paramètre dans le programme de
report.
3.8.1 Structure
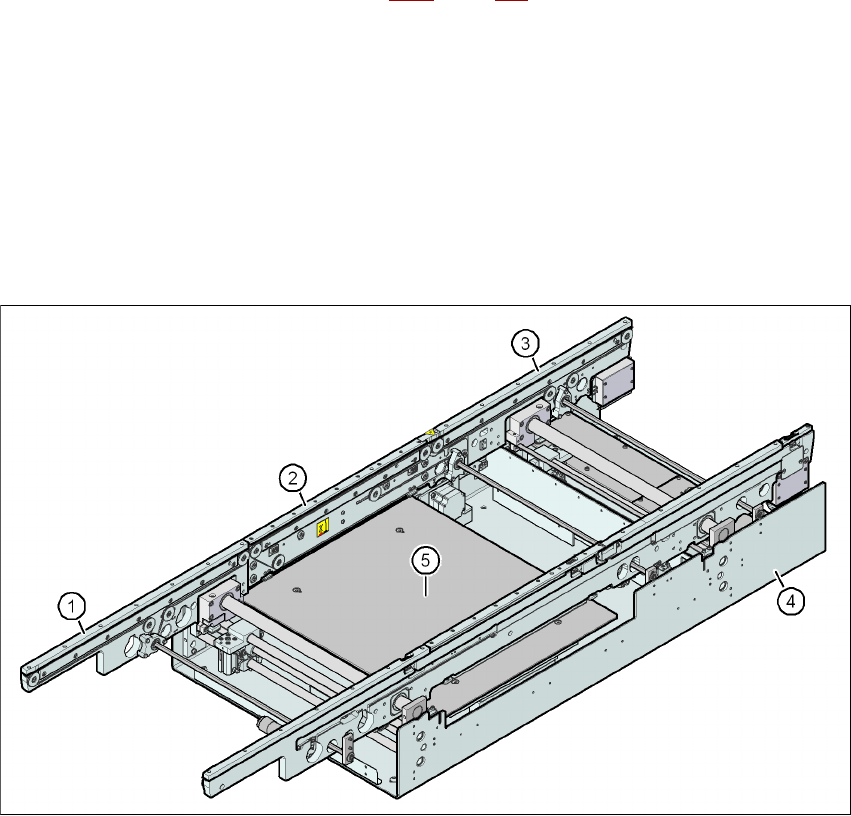
3.8.1.1 Structure du convoyeur simple de CI
3
Fig. 3.8 - 1 Structure du convoyeur simple de CI
(1) Convoyeur d'entrée
(2) Convoyeur de travail
(3) Convoyeur de sortie
(4) Cuve de montage
(5) Table de levage
Manuel d'utilisation SIPLACE D1i/D2i 3 Caractéristiques techniques de l'automate
A partir de la version du logiciel SR.605.03 SP2 Edition 10/2012 FR 3.8 Système de convoyage des CI
129
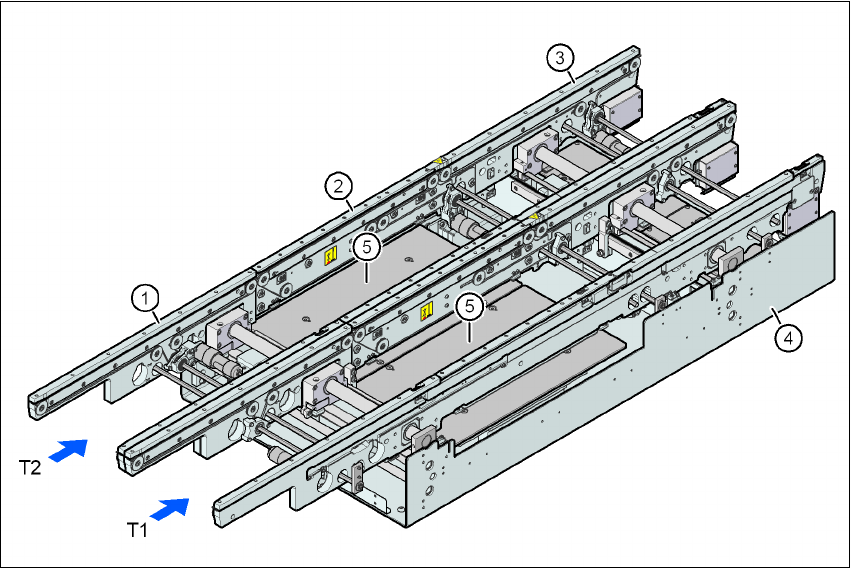
3.8.1.2 Structure du convoyeur double flexible
Le convoyeur double flexible possède deux pistes de convoyage, indépendantes l'une de l'autre
sur les plans électrique et mécanique.
3
Fig. 3.8 - 2 Structure du convoyeur double des CIs
(1) Convoyeur d'entrée
(2) Convoyeur de travail
(3) Convoyeur de sortie
(4) Cuve de montage
(5) Table de levage
T1 Piste de convoyage 1
T2 Piste de convoyage 2
3.8.2 Description
Pour les nécessités du report, le circuit imprimé est calé par son côté inférieur. La distance entre
la face supérieure du circuit imprimé et la tête de report demeure donc inchangée pour chaque
circuit imprimé et ne dépend pas de l'épaisseur du circuit imprimé. Par voie de conséquence, le
taux de report ne dépend pas non plus de l'épaisseur des CIs. Par ailleurs, il est possible d'opti-
miser le centrage de marque de CI. L'intervalle constant entre la surface des CIs et la caméra CI
fait que le foyer de la caméra CI est toujours réglé avec la même précision sur la surface des CIs.