CX-1_维修调整.pdf - 第217页
Rev2.2 维修调整要领书 14-42 14 14 14 14 - - - - 7 7 7 7 - - - - 3 3 3 3 - - - - 2. 2. 2 . 2. 支 承台 支承 台 支承 台 支承 台 / / / / 自 动宽 度 调整 用 步进 马 达驱 动 器的 设 定 自动 宽 度 调整 用 步进 马 达驱 动 器的 设 定 自动 宽 度 调整 用 步进 马 达驱 动 器的 设 定 自动 宽 度 调整 用 步进 马 达驱…
Rev2.2
维修调整要领书
14-41
14
1
414
14-
--
-7
77
7-
--
-3
33
3.
..
.步进驱动器的调整
步进驱动器的调整步进驱动器的调整
步进驱动器的调整
传输装置的进向马达、出向马达、中央马达以及支承台马达使用的是步进电动机。
为了正确地转动步进马达,需要调整5相步进驱动器。
・传送步进马达(进向、出向、中央) HM001320000 5相步进驱动器
・支承台马达 HX004200000 5相步进驱动器
14
1414
14-
--
-7
77
7-
--
-3
33
3-
--
-1.
1.1.
1.传送步进马达驱动电流的调整
传送步进马达驱动电流的调整传送步进马达驱动电流的调整
传送步进马达驱动电流的调整
<
<<
<调整程序
调整程序调整程序
调整程序>
>>
>
① 调整前,请确认『DC电源输出电压的调整』。
② 转动传送步进马达,用数字万能表测定5相步进驱动器上的『CP1』,『CP2』端子的电压。
数字万用表的连接,『CP1』为”+”,『CP2』为”-”。
③ 慢慢转动『RUN』旋钮,让『CP1』~『CP2』之间的电压为2.8V±0.01V。。
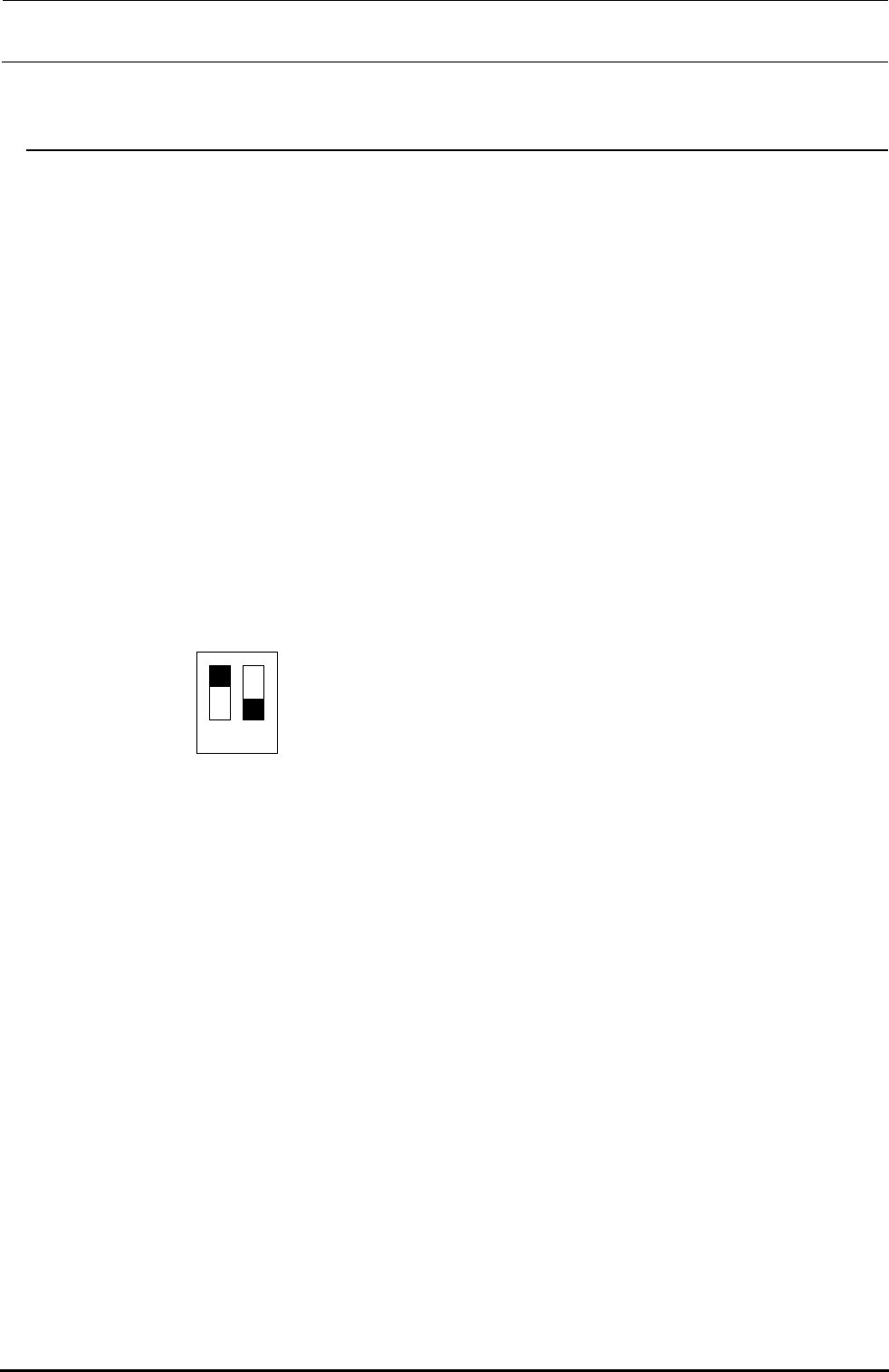
④ 请把步进驱动器上的步进SW设定如下图所示。
・
・・
・规格值
规格值规格值
规格值
驱动电流:1.4A±0.005A/相
( CP1-CP2之间的电压为2.8V±0.01V)
ON
1 2
1.ON
2.OFF
图
图图
图 14
1414
14-
--
-7
77
7-
--
-3
33
3-
--
-1
11
1-
--
-1
11
1
设定开关的设定
设定开关的设定设定开关的设定
设定开关的设定
Rev2.2
维修调整要领书
14-42
14
1414
14-
--
-7
77
7-
--
-3
33
3-
--
-2.
2.2.
2.支承台
支承台支承台
支承台/
//
/自动宽度调整用步进马达驱动器的设定
自动宽度调整用步进马达驱动器的设定自动宽度调整用步进马达驱动器的设定
自动宽度调整用步进马达驱动器的设定
<
<<
<调整程序
调整程序调整程序
调整程序>
>>
>
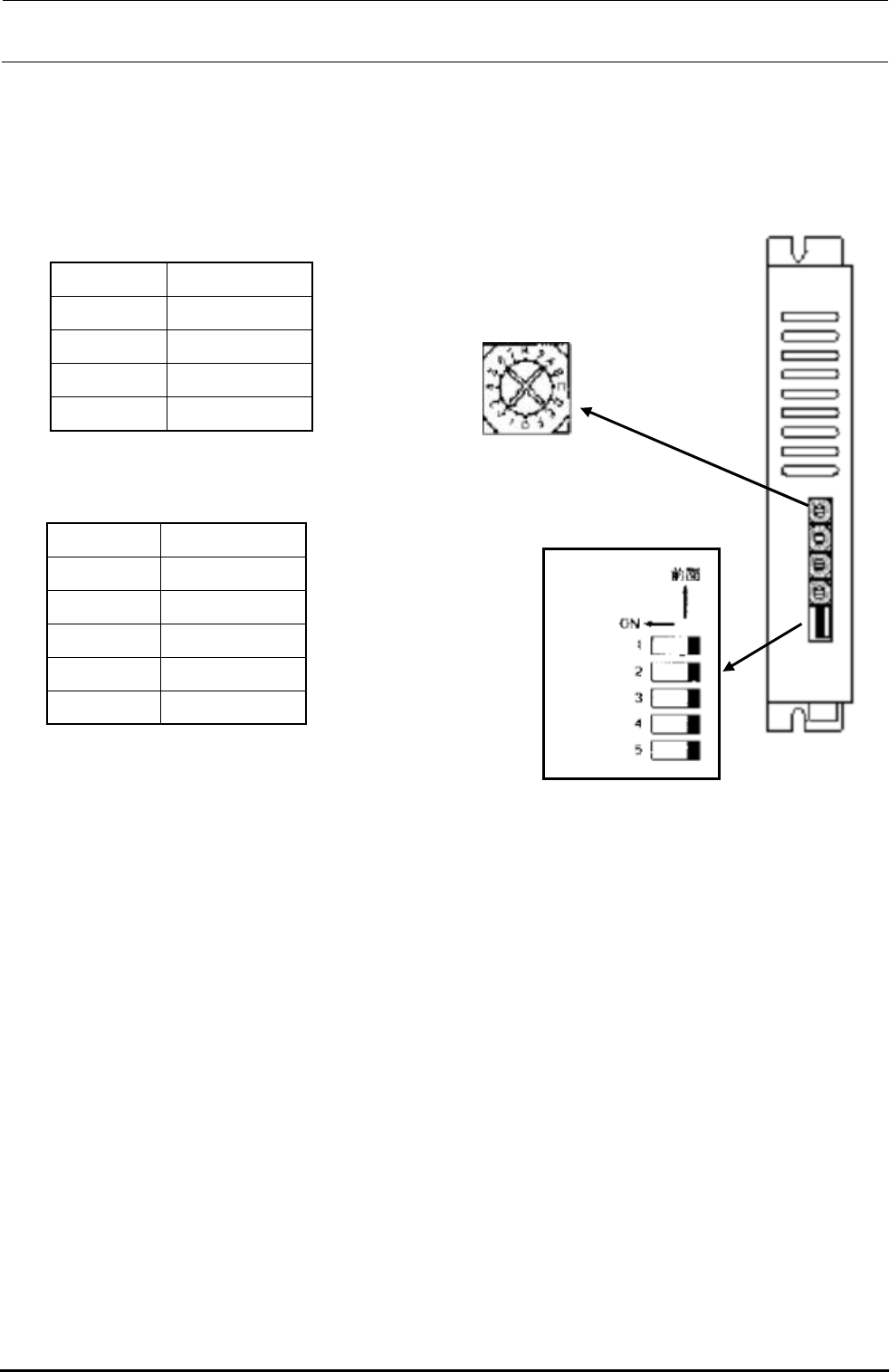
① 把设定用的旋转开关设定如下表所示。
② 设定用的步进SW设定如下表所示。
SW名称 设定值
STOP 5
RUN C
M2 0
M1 0
SW名称 设定值
TEST OFF
2/1CK OFF
C.D OFF
L/HV ON
OP OFF
旋转部箭头指向设定值。
STOP
RUN
OP
L/HV
C.D
2/1CK
TEST
M2
M1
Rev2.2
维修调整要领书
14-43
14
1
414
14-
--
-7
77
7-
--
-4
44
4.
..
.编码器的连接确认
编码器的连接确认编码器的连接确认
编码器的连接确认
利用编码器,确认位置的步进马达的计数器的动作。
编码器的连接确认,在步进马达驱动器的调整后进行。如果编码器的信号没有正确地计数的状态动作
的话,有可能步进马达的位置不能正确地控制。
1) 打开
(ON)
装置的断电器,然后打开
(ON)
电源开关。
2) 起动调整用软件。
3) 用手转动各马达轴,确认计数器值和极性。
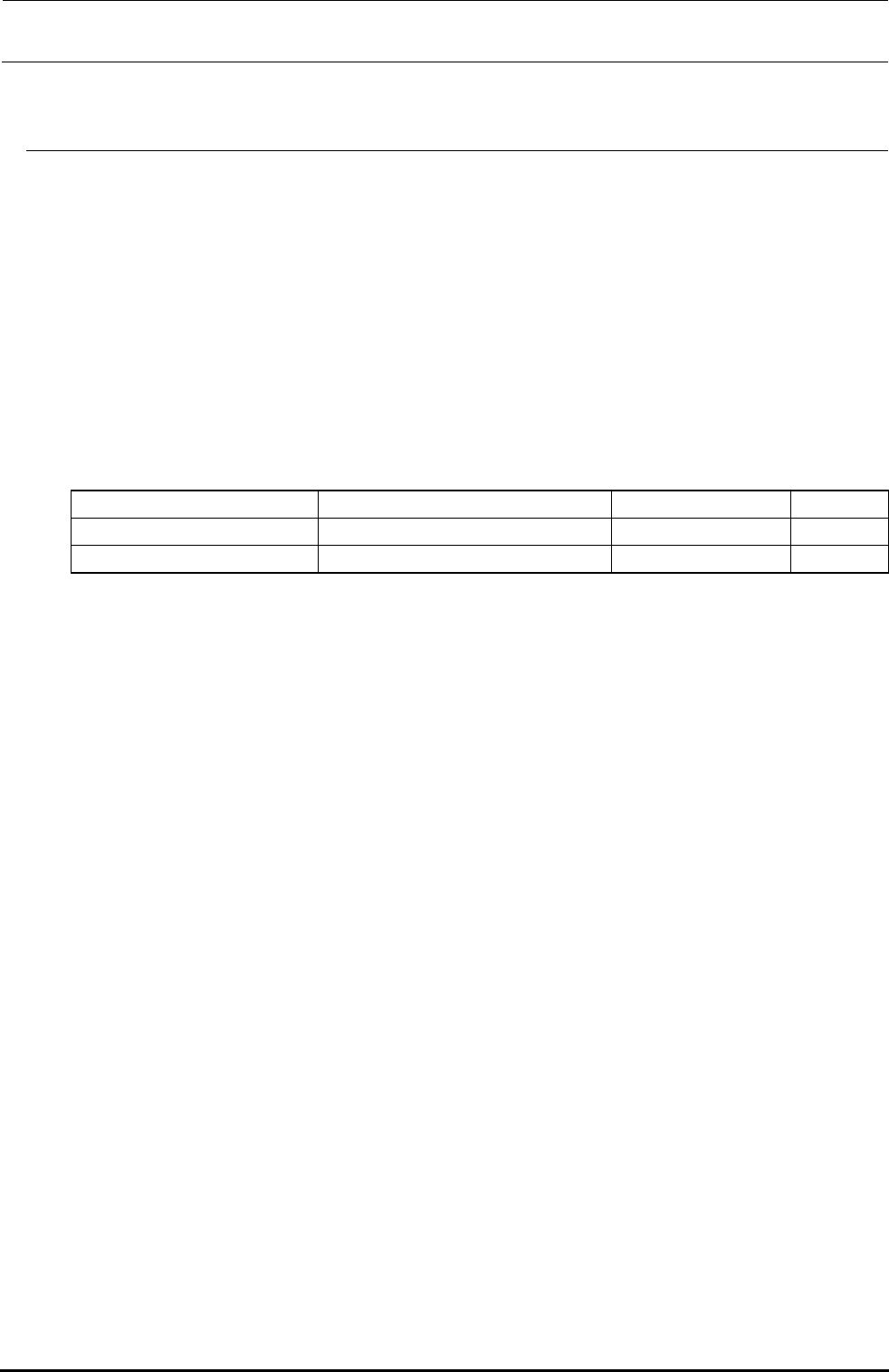
确认与表14-7-4-1基本相同的值被计数。
表14-7-4-1
14-7-4-114-7-4-1
14-7-4-1
各马达的极性和计数值
各马达的极性和计数值各马达的极性和计数值
各马达的极性和计数值
计数值没有变化,或与表14-7-4-1明显不同时,有可能是插头插错等,请确认。
4) 确认之后,退出调整用软件。装置的电源关闭之后,电源开关和断路器变为 OFF。
以上,编码器的连接确认结束。
马达轴 极性 计数值 分辨率
支承台 编码器 L (-)↓下 上↑(+) 400脉冲/10mm 25μm
自动基板宽度调整 编码器
(-)→←窄 宽←→ (+) 1000脉冲/10mm
10μm