CX-1_维修调整.pdf - 第53页
Rev 2.2 维修调整要领书 2- 2 -4 . IC θ 马达(FMLA贴装头) 更换了马达之后,需要重新输入有关贴装头心距调整、轴原点、Z轴的高度以及激光、贴装头偏差、 贴装综合偏差的MS参数。(输入项目请参照2-9项。) 1) 按照2-1-1项1)~7)拆下贴装头部上部护盖。 2) 按照2-1-2项、卸下FMLA贴装头。 3) 卸下贴装头上SP2个。 4) 卸下球螺丝的安装螺丝 ⑪ (4个)。 5) 卸下ICθ马达的安装螺丝 ⑪…
Rev 2.2
维修调整要领书
<程序>
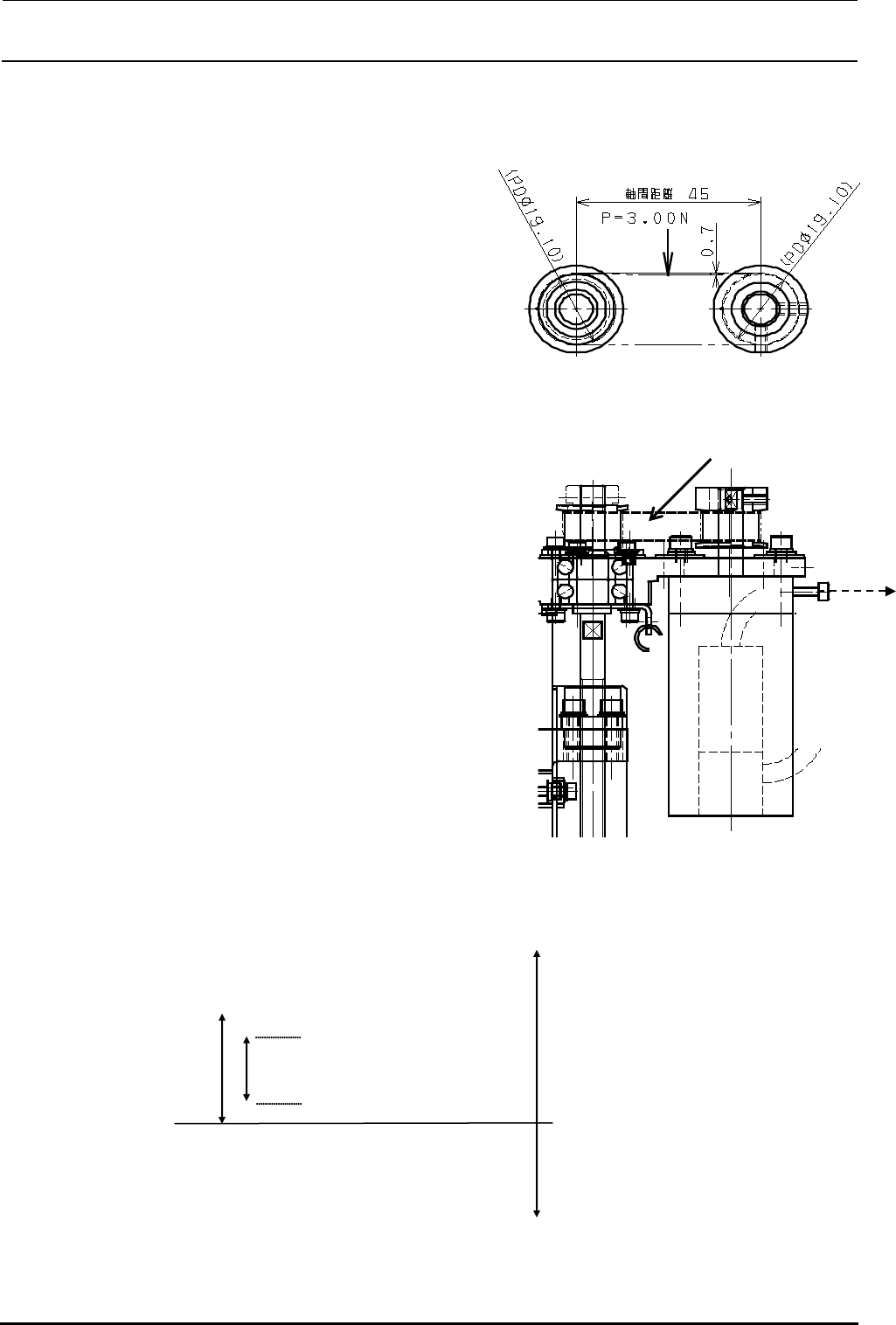
① 把螺丝插到ICZ马达的螺丝孔,朝箭头方向用
杆张力 78.5 N(8kgf)的拉力,用安装螺丝固
定。
② 请用杆张力把皮带中央部用 3.00 N的力量确认
垂度是否是 0.7 mm。
※
在IC Z 马达安装螺丝⑪(4个)上涂上锁定
漆242后,拧紧固定,转矩为 2.3Nm。
此时,从前面看马达的电线在左侧。
※固定 ICZ 马达皮带轮的固定螺丝时,
应注意 ICZ 马达轴的平部和皮带轮
固定螺丝的方向。
固定螺丝的紧固转矩为 0.5Nm。
4) 组装后,请获取 MS 参数的基板上面高度。此值如果不在 1.5~6.5mm 之间的话,相对与 ICZ 轴马
达轴把马达皮带轮旋转 180 度固定,再次取得 MS 参数,确认基板上面高度在 1.5~6.5mm 之间。
同步皮带ICZ
拉
(Z 轴球螺丝旋转
1 圈的行程)
Z 传感器 OFF 区域
1.5~6.5mm 稳定区域
Z 传感器 ON 区域
8mm
2-11
Rev 2.2
维修调整要领书
2- 2-4.ICθ马达(FMLA贴装头)
更换了马达之后,需要重新输入有关贴装头心距调整、轴原点、Z轴的高度以及激光、贴装头偏差、
贴装综合偏差的MS参数。(输入项目请参照2-9项。)
1) 按照2-1-1项1)~7)拆下贴装头部上部护盖。
2) 按照2-1-2项、卸下FMLA贴装头。
3) 卸下贴装头上SP2个。
4)
卸下球螺丝的安装螺丝
⑪
(4个)。
5)
卸下ICθ马达的安装螺丝
⑪
(4个)。
6)
从卸下的ICθ马达卸下Z传感器配件IC
⑪
、
半总成 ⑪
、吸嘴套 轴IC。
7)
安装时、按照详单的顺序进行。
8) 按照以下的程序进行确认和调整。
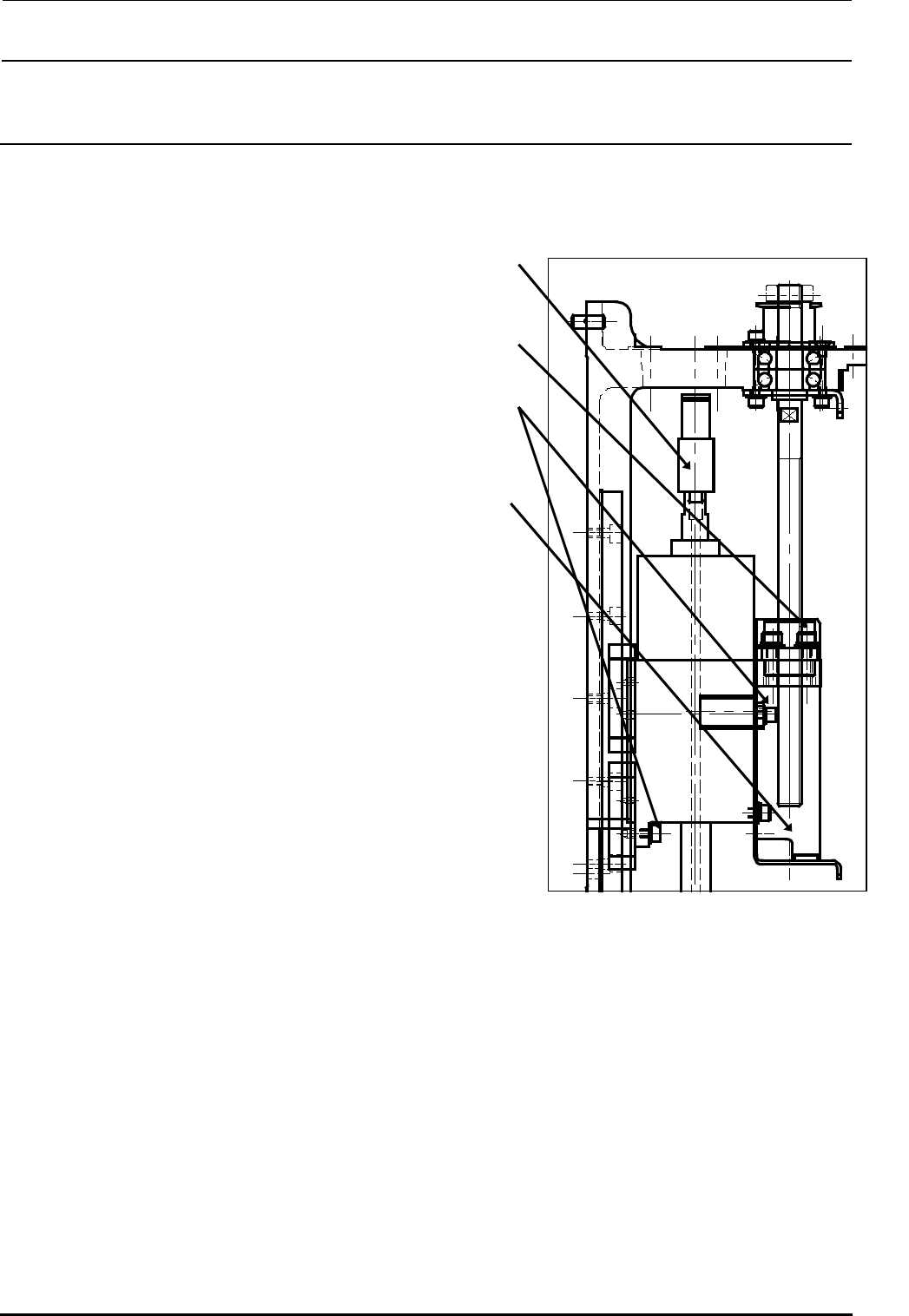
注) 拆卸 IC 电动机时,作业时注意不要碰伤 LA 装置的
孔部。
同时,作业时要避免滑块从 LM 导轨脱出。
滑块内的球有可能弹出来。
图2-2-6
⑰
⑭
⑮
⑯
2-12
Rev 2.2
维修调整要领书
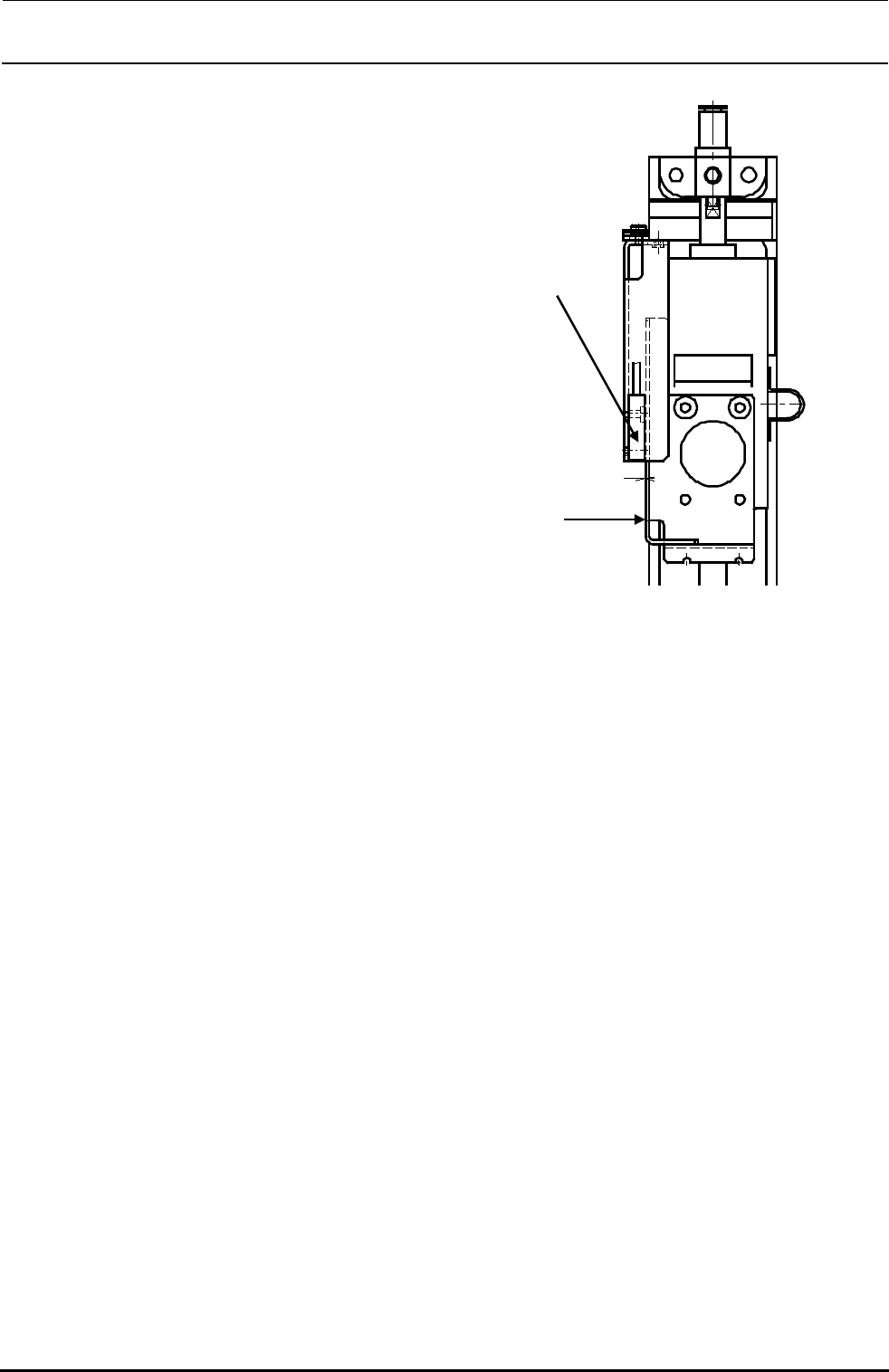
<程序>
①
测定Z传感器和Z传感器配件IC
⑪
的
间隙。 上下移动Z传感器配件,确认上
下的间隙均为0.9±0.2mm的范围。
(A尺寸)
② 如果在规格外时,请拧松Z传感器座的安
装螺丝,调整Z传感器的位置。另外,上
下移动IC θ马达,间隙量变化时,请
拧松Z传感器配件的方向,进行调整。
③ 在不装ICZ电动机和贴装头上升SP
IC的状态下用弹簧秤检查,是否是以
0.75 kg滑动。
※用手关闭半总成之后,用扳手转动 1/6 圈。
※在ICθ马达安装螺丝 ⑪(4个)上Nm 拧紧固定。此时,
请让马达基准面和后导向器基准面没有间隙。
※在球螺丝的安装螺丝 ⑪(4 个)上涂上锁定漆242后,用转矩3.7 Nm 拧紧固定。
※请按照2-1-2项进行贴装头的安装。
然后,请进行贴装头心距调整。
Z传感器配件
A
Z传感器
2-13