CX-1_使用说明书.pdf - 第36页
第 1 部 基本编 第 1 章 设备概要 1-2-11 激光定心系统 本装置采用非接触式定心方式, 从侧面照射激光, 通过激光校准传感, 读取其光影, 识别元 件的位置与角度。 レーザアラインセンサ θ Z 图 1-2-10 激光校准传感器 通过Z轴的上下移动,真空吸取元件,向元件投射激光。元 件遮住激光的部分成为阴影,用 θ轴旋转元件,即可知该阴影宽度的变化。 ◇ 从阴影宽度的变化求出吸取元件的位置偏移及角度偏移,校正该偏移量后进行贴…
第 1 部 基本编 第 1 章 设备概要
1-2-10 HMS
HMS(高度测量装置)是用于测量送料器吸取位置等元件高度的系统。
此系统由实际装备在贴装头上的高度变化传感器(传感器部分与功放部分)和控制此传感
器的 HMS 基板构成。
传感器功率放大部分和基板上的调整旋钮及开关等已在出厂时调整好,请勿调整。
注意
FAR灯
NEAR
灯
NEAR
灯
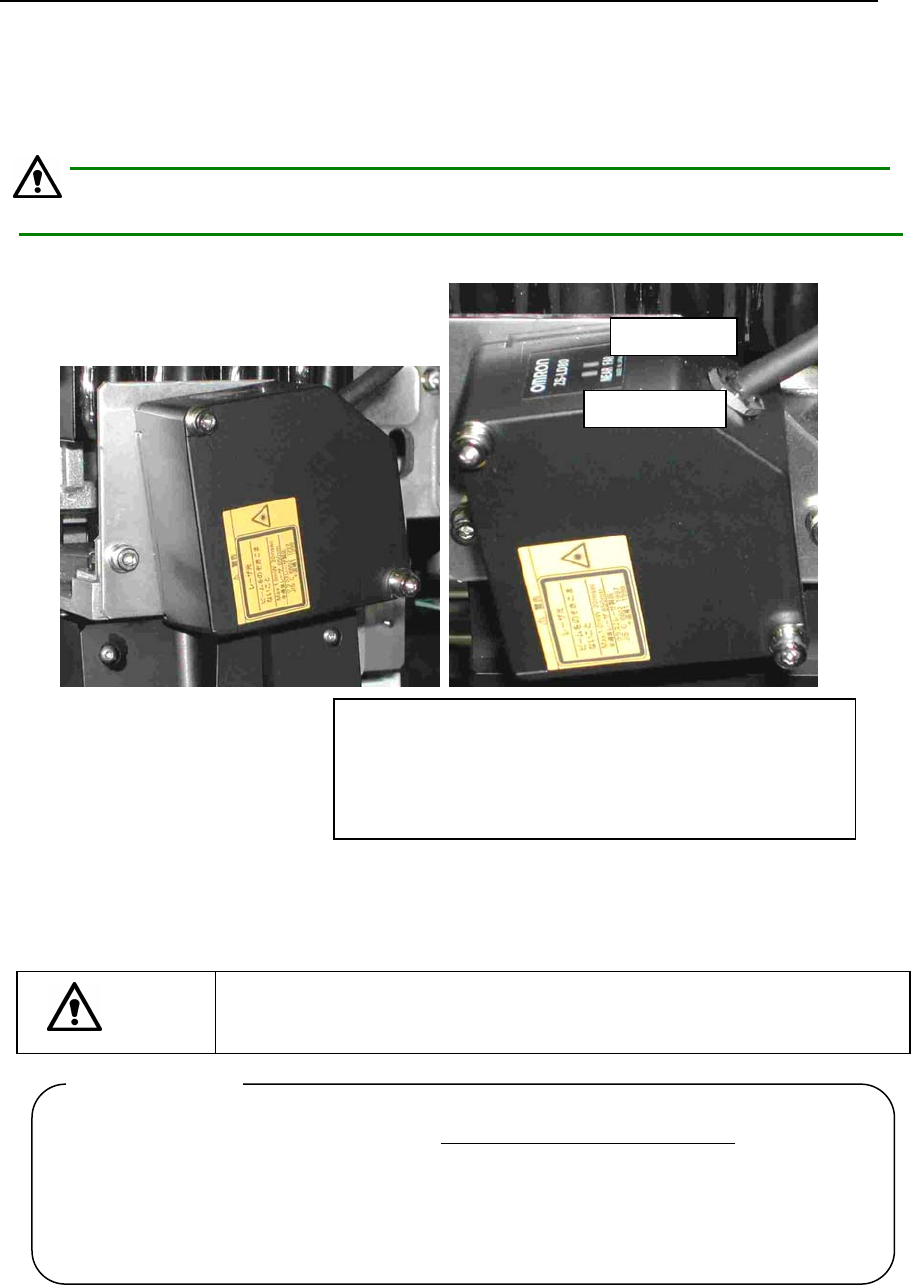
NEAR/FAR 两灯不亮:测量范围外
FAR 点亮: 测量范围内远距离一侧
NEAR 点亮: 测量范围内近距离一侧
NEAR/FAR 两灯亮: 测量中心距离±1mm
距离显示灯 点亮状态
◆HMS符合JIS C6802 激光安全规格 2 级标准。
请按照本手册指示安全地使用。
注意
高度传感器使用的激光会发出可见激光束。 切勿直视光束,也不要去触摸。
・
测试对象的材料 形状属于下列情况时,有可能无法测试或显示不出精度,敬请注意。
透明材料、反射率过小的材料、比焦点直径小的对象物
弯曲率大、倾斜度大等元件等
此外,有些倾斜元件,因其表面状态有可能无法测试。
关于测试对象
1-15
第 1 部 基本编 第 1 章 设备概要
1-2-11 激光定心系统
本装置采用非接触式定心方式,从侧面照射激光,通过激光校准传感,读取其光影,识别元
件的位置与角度。
レーザアラインセンサ
θ
Z
图 1-2-10 激光校准传感器
通过Z轴的上下移动,真空吸取元件,向元件投射激光。元件遮住激光的部分成为阴影,用
θ轴旋转元件,即可知该阴影宽度的变化。
◇ 从阴影宽度的变化求出吸取元件的位置偏移及角度偏移,校正该偏移量后进行贴片。
L 激光校准传感器适用 IEC825Class1 及 CDRH Class 1。
请按本说明书的指示安全使用。
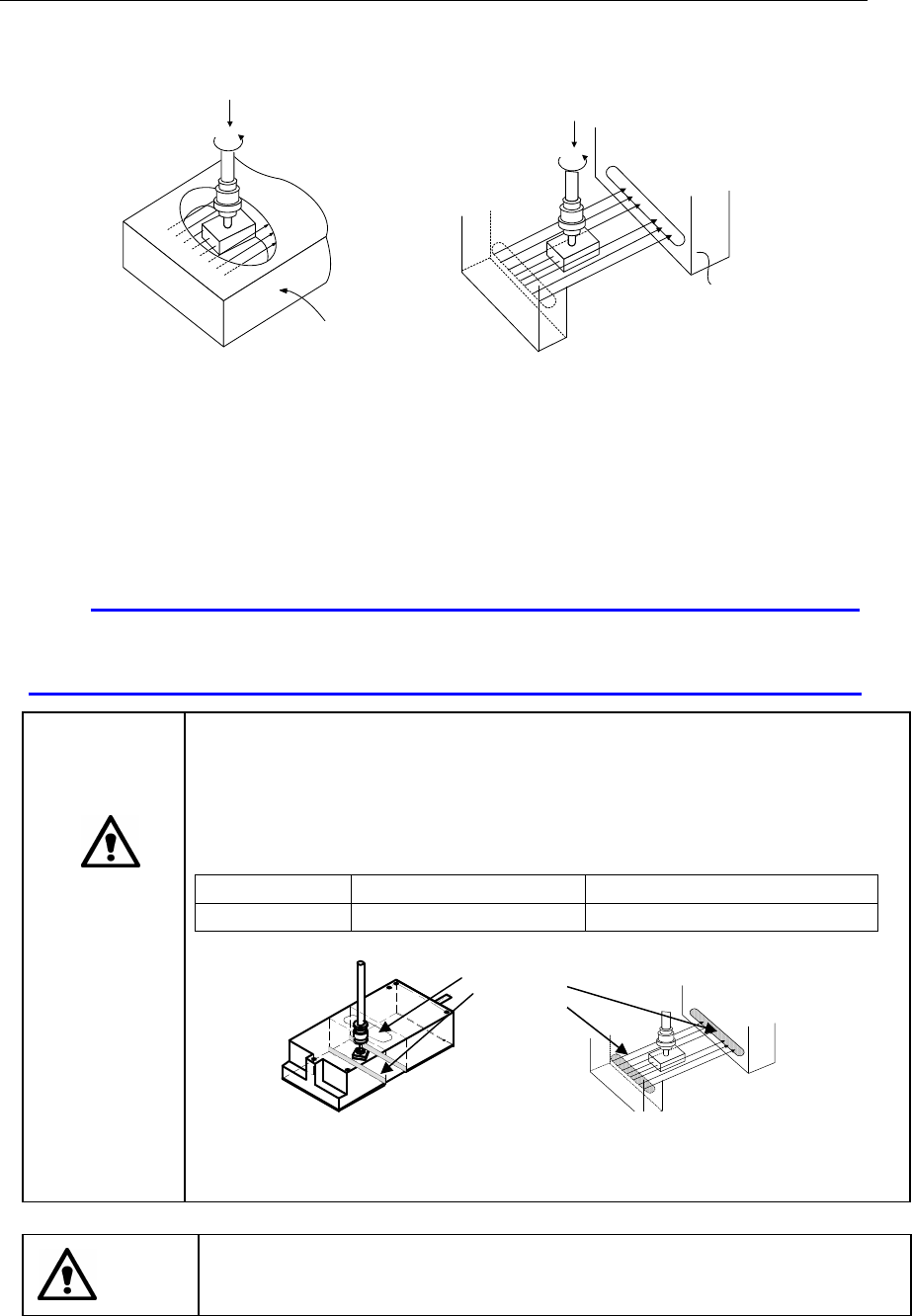
保护激光装置
玻璃面的注意
事项
覆盖激光装置检测部位的玻璃面划伤时,在个别情况下,会影响激光校准传感
器的检测效果,因此请注意以下几点。
1. 请不要使用超过标准规格最大尺寸的元件。
2.即便是标准规格尺寸内的元件,在挪动吸取位置后可能会碰到玻璃面,务
请格外注意。
规格〈最大元件尺寸〉
FMLA 正方形元件: □33.5mm 对角线长度: 47.0mm
MNLA 正方形元件: □20.0mm 长方形元件: 26.5mm×11mm
〈MNLA〉 〈FMLA〉
注意
若不按本说明书的步骤进行控制、调整与操作,有可能导致辐射的危险。
レーザアラインセンサ
θ
Z
激光校准传感器
激光校准传感器
〈MNLA〉
〈FMLA(选购项) 〉
玻璃
1-16
第 1 部 基本编 第 1 章 设备概要
1-17
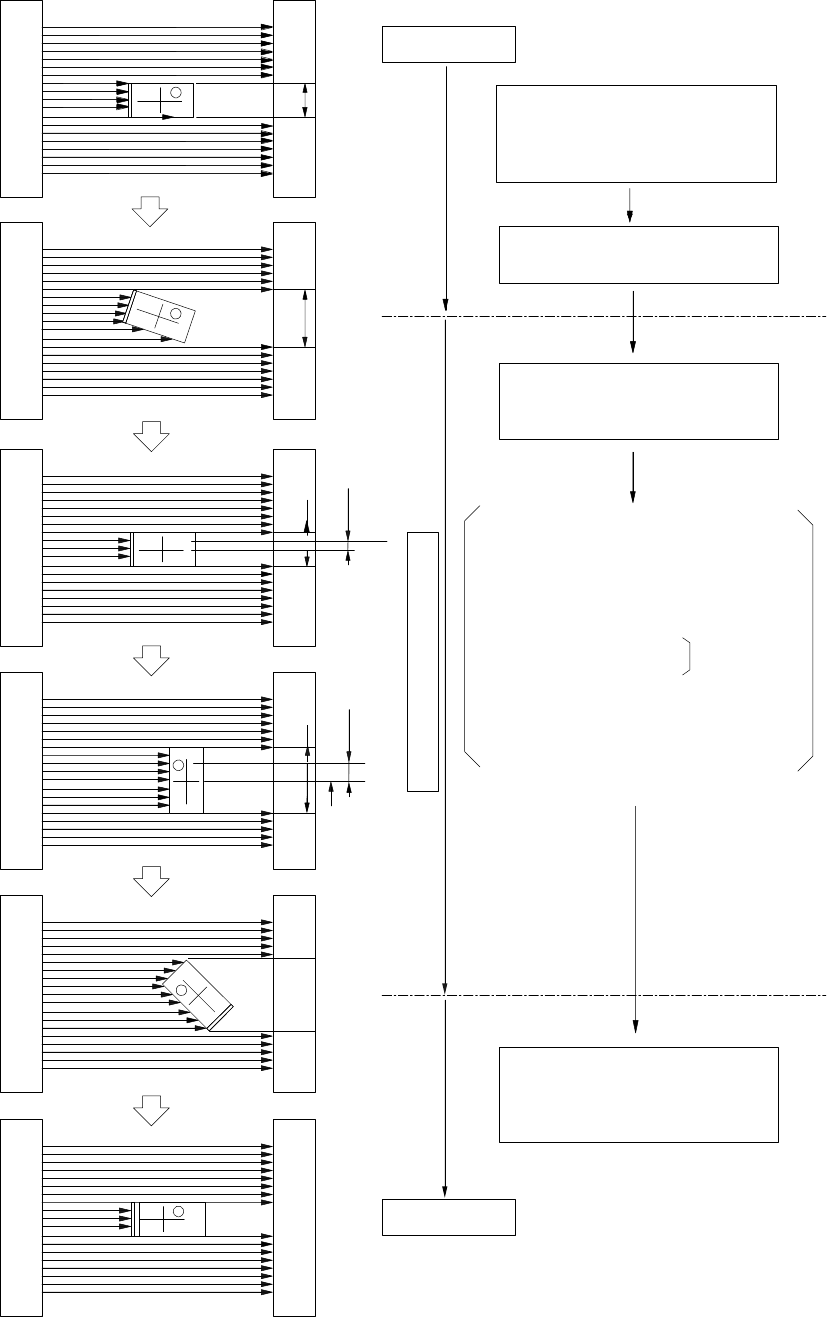
(1) 激光校准定心流程
A
D
d X
B
C
d Y
E
校正
校正
校正位置偏移 (dX、dY)
角度偏移(dθ) 后
进行贴片
(+)旋转
激光校准测定
(+)旋转
因已知吸嘴中心,故可从与元件中心
的差值,得知
Y方向的偏移 dX
X方向的偏移 dy
此外还可根据③或④的θ马达的移
位传感器得知角度偏移值 dθ。
(+)旋转
(元件中心)
(吸嘴中心)
寻找测量过程中阴影宽度最小的③
④。
吸取元件
按(+)方向旋转θ轴,
预载
通过 Z 轴驱动吸取元件,使元件符
合激光校准高度
开始用激光测量校准
然后按(-)方向旋转θ轴
(预载)
①
(-)旋转
(预载)
②
③
④
⑤
⑥
贴片