CX-1_使用说明书.pdf - 第81页
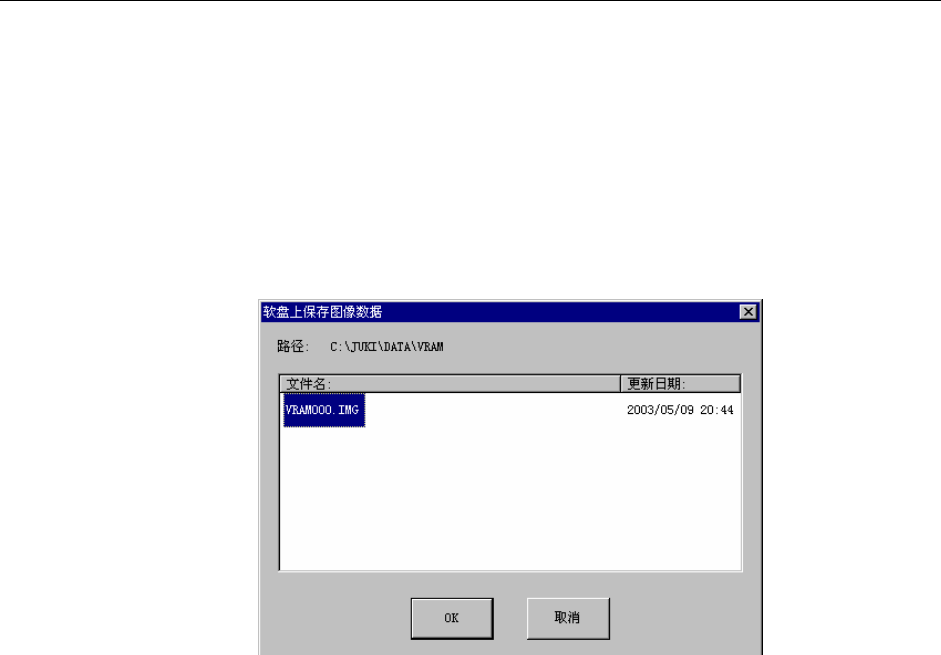
第 1 部 基本编 第 1 章 设备概要 1-5-10 将图像数据保存到FD 在生产中可利用本项功能, 按Ctrl+F2键, 把显示错误信息的图像文件, 或读出错 误机械暂停时,把错误详细对话框输出的错误图像文件,保存在软盘里。 操作方法如下: (1) 把软盘插入软驱。 (2) 单击菜单上的“文件”,再单击下拉菜单上的“保存图像数据FD”。 画面上出现对话框,问是否要在“软盘上保存图像数据”。 图1-5-12 在软盘上保存图像数据 (3…
第 1 部 基本编 第 1 章 设备概要
1-60
1-5-9 将设备信息保存到 FD
本设备里的硬盘有保存设备信息的功能。(保存设备信息的详细方法,请参见
“2-14-1:设备信息的取得”的说明。)
单击菜单上的“文件”,再单击下拉菜单上的“设备信息的保存FD”。该“设备
信息的保存FD”的功能是,把存在硬盘里的设备信息加以压缩,便于存在软盘里。
本项功能,请得到本公司的服务业务人员、或代理店的同意后再使用。
得到文件后,也请按照上述规定办理。
(1) 把软盘插入软盘驱动器里。
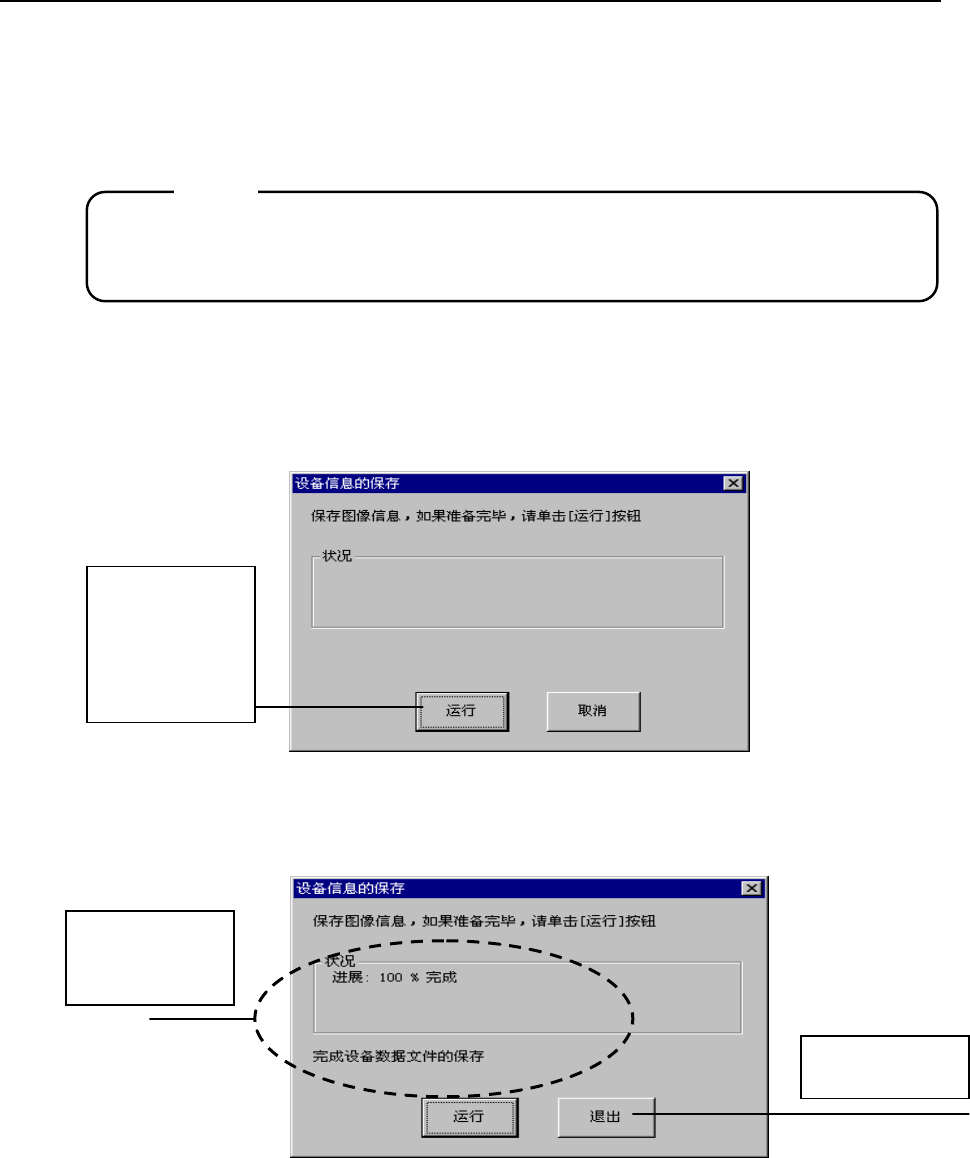
(2) 单击菜单上的“文件”,再单击下拉菜单上的“设备信息的保存FD”。
之后,画面上会出现下图。
图1-5-10 设备信息的保存
(3) 按“运行”按钮后,设备即开始压缩设备信息,并保存到软盘里。
信息存入软盘成功后,画面上出现新的对话框,如下图:
图1-5-11 设备信息的保存(正常结束时)
(4) 要关闭对话框时,请单击“退出”。
* 如果画面上提示软盘容量不足时,请更换一个有足够容量的软盘,再存一次。
注意:
按 “运行”后,
开始压缩设备
信息,保存在软
盘里。
完成设备数据
文件的保存。
退出对话框
第 1 部 基本编 第 1 章 设备概要
1-5-10 将图像数据保存到FD
在生产中可利用本项功能,按Ctrl+F2键,把显示错误信息的图像文件,或读出错
误机械暂停时,把错误详细对话框输出的错误图像文件,保存在软盘里。
操作方法如下:
(1) 把软盘插入软驱。
(2) 单击菜单上的“文件”,再单击下拉菜单上的“保存图像数据FD”。
画面上出现对话框,问是否要在“软盘上保存图像数据”。
图1-5-12 在软盘上保存图像数据
(3) 按“OK”按钮后,图像数据就保存在软盘里了。数据保存成功后,对话
框自动关闭。
(4) 如果不想保存图像数据、要退出对话框,请按“取消”键。
z 如果画面提示“软盘容量不足”,请更换一个有足够容量的软盘,再存一
次。
若图像文件的容量超过软盘容量,必须把文件分存在若干个软盘里。出现
这种情况时,画面上会提示。请按提示操作,更换软盘。
1-61
第 1 部 基本编 第 1 章 设备概要
1-62
1-6 主要规格
1-6-1 设备规格
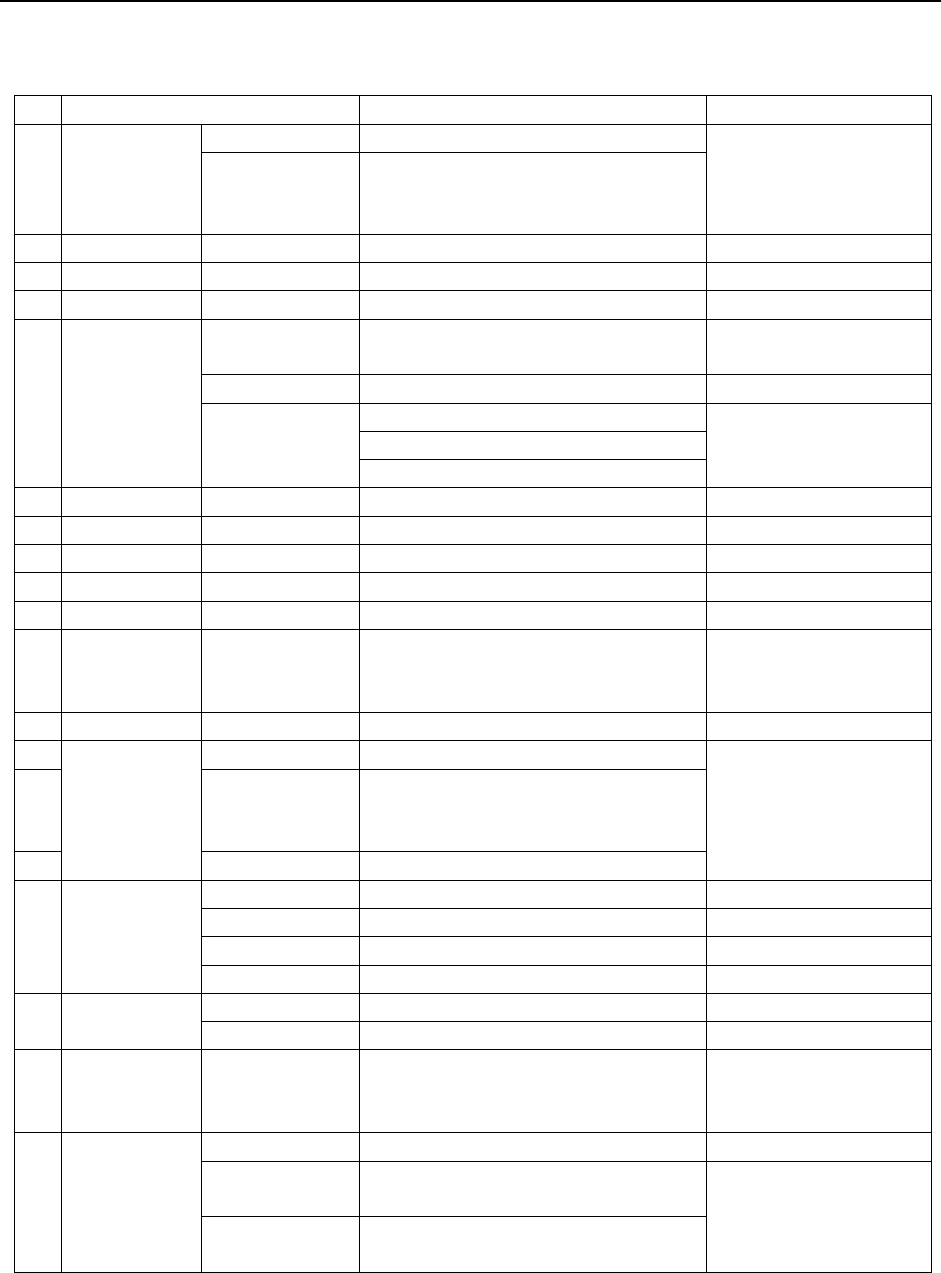
CX-1 的主要规格如下表所示。
表 1-6-1 CX-1 设备规格
No. 项目 规格 备注
日本国内 三相 AC 200V
、
220V
、
240V
1 电源电压
日本国外
三相 AC 200V
、
220V
、
240V
、
380V、
400V
、
415V
根据发送目的地
出厂时设置对应
2 电压允许范围 额定电压 ± 10%
3 频率 50 / 60Hz
4 视在功率 3.0kVA
宽度 1330 mm
(包括基板传送部 = 1400
mm)
深度 1500 mm (包括键盘) = 1735 mm)
1440 mm (主机部)
1725 mm (图像显示器)
5 机械尺寸
高度
2000 mm (信号灯)
* 基板传送高度= 900 mm
时的尺寸
6 基板传送高度 900mm±20mm 或 950mm±20mm
7 对应元件高度 12 mm (NC)
8 基板尺寸 M 尺寸 (最大 330×250mm)
9 传送方向 向右传送 / 向左传送
10 传送基准 前面基准 / 后面基准
11 贴片头单元
配备 4 个吸嘴的 MNLA
(对应
、、
激光识别 图像识别 简易负
荷控制)
12 主机重量 1480 kg
13 气压 0.5 0.05 MPa
14 消费量
标准:230 L/min(标准状态)
R 贴片头选项规格:280 L/min(标准
状态)
15
使用空气
干燥空气 大气压结露点-17℃以下
*1
温度 10℃~35℃
保证精度的温度 20℃~25℃
湿度 30%~80%RH (但不得有露水)
16
环境条件
(运行时)
标高 标高 1000m 以下
温度 -15℃~70℃
17
环境条件
(运输及保管)
湿度 20%~95%RH (但不得有露水)
18 对应语言
日文版本: 日语
、
英语
英语版本: 英语
中文版本: 中文
、
英语
X-Y 0.001 mm AC 伺服马达闭环方式
Z
0.00125 mm(MNLA 贴装头)
0.001 mm(FMLA 贴装头)
19 分辨率
θ
0.01 (MNLA 贴装头)
0.005 (FMLA 贴装头)
AC 伺服马达半闭环方式