00195193-02 SG D4 FSE en (1).pdf - 第110页
Reference run Overview Reference Run Student Guide SIPLACE D4 (FSE) EN 09/2006 Reference run 103 5 Reference run 5.1 Overview Reference Run The C&P12 has 3 axes: the Z-axis, the star ax is and the DP axis, plus the X…

Communication and Control
Board type recognition CAN Commands for Reading and Writing the Board IDs
Student Guide SIPLACE D4 (FSE)
Communication and Control EN 09/2006
108
Reference run
Overview Reference Run
Student Guide SIPLACE D4 (FSE)
EN 09/2006 Reference run
103
5 Reference run
5.1 Overview Reference Run
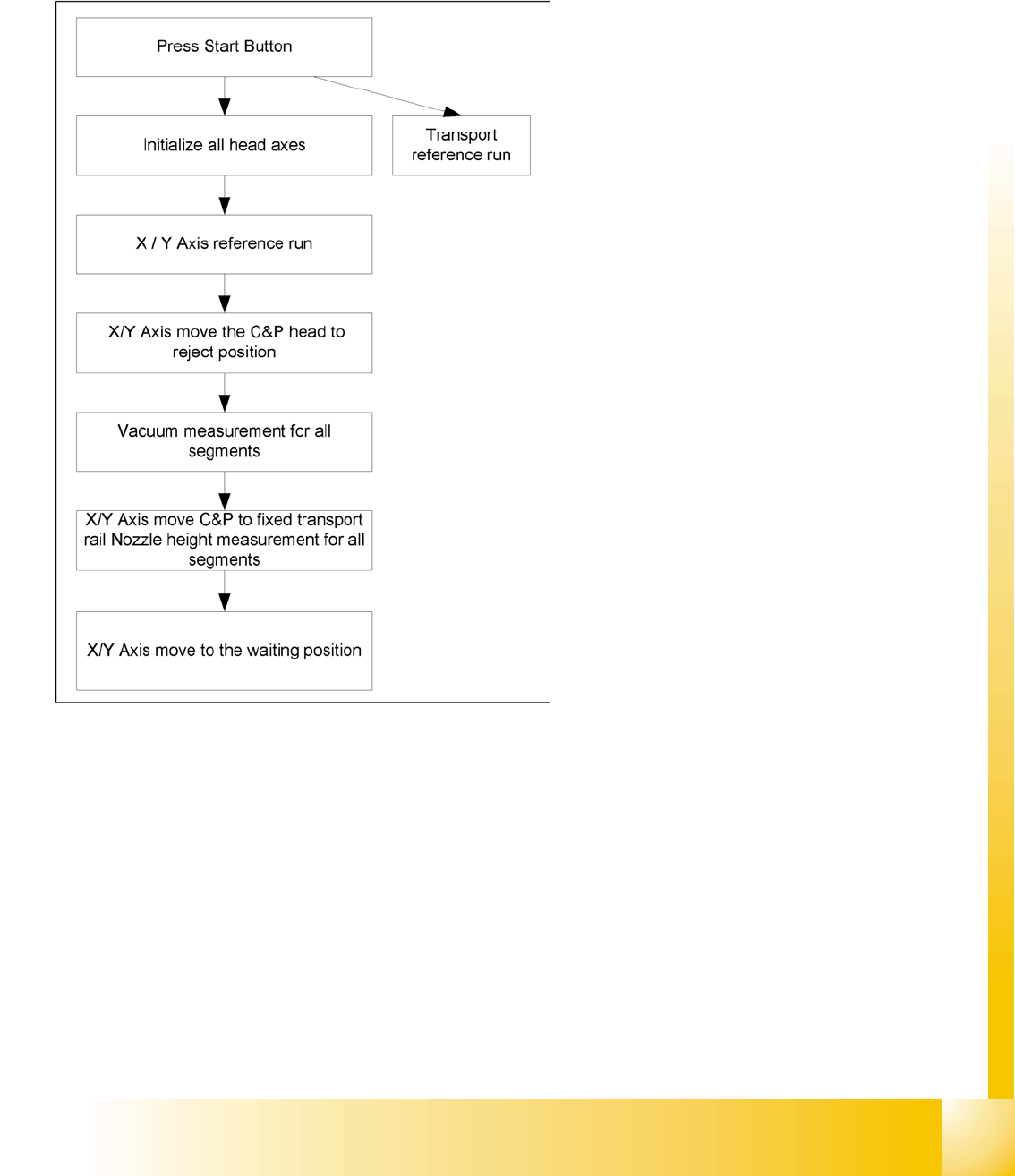
The C&P12 has 3 axes: the Z-axis, the star axis
and the DP axis, plus the X and Y axes for the
gantry. Before you start the production you must
initialize all axes that the axis controller know their
actual mechanical position.
Reference run
Reference Run Gantry Reference Run Sequence at X and Y-axis
Student Guide SIPLACE D4 (FSE)
Reference run EN 09/2006
104
5.2 Reference Run Gantry
5.2.1 Reference Run Sequence at X and Y-axis
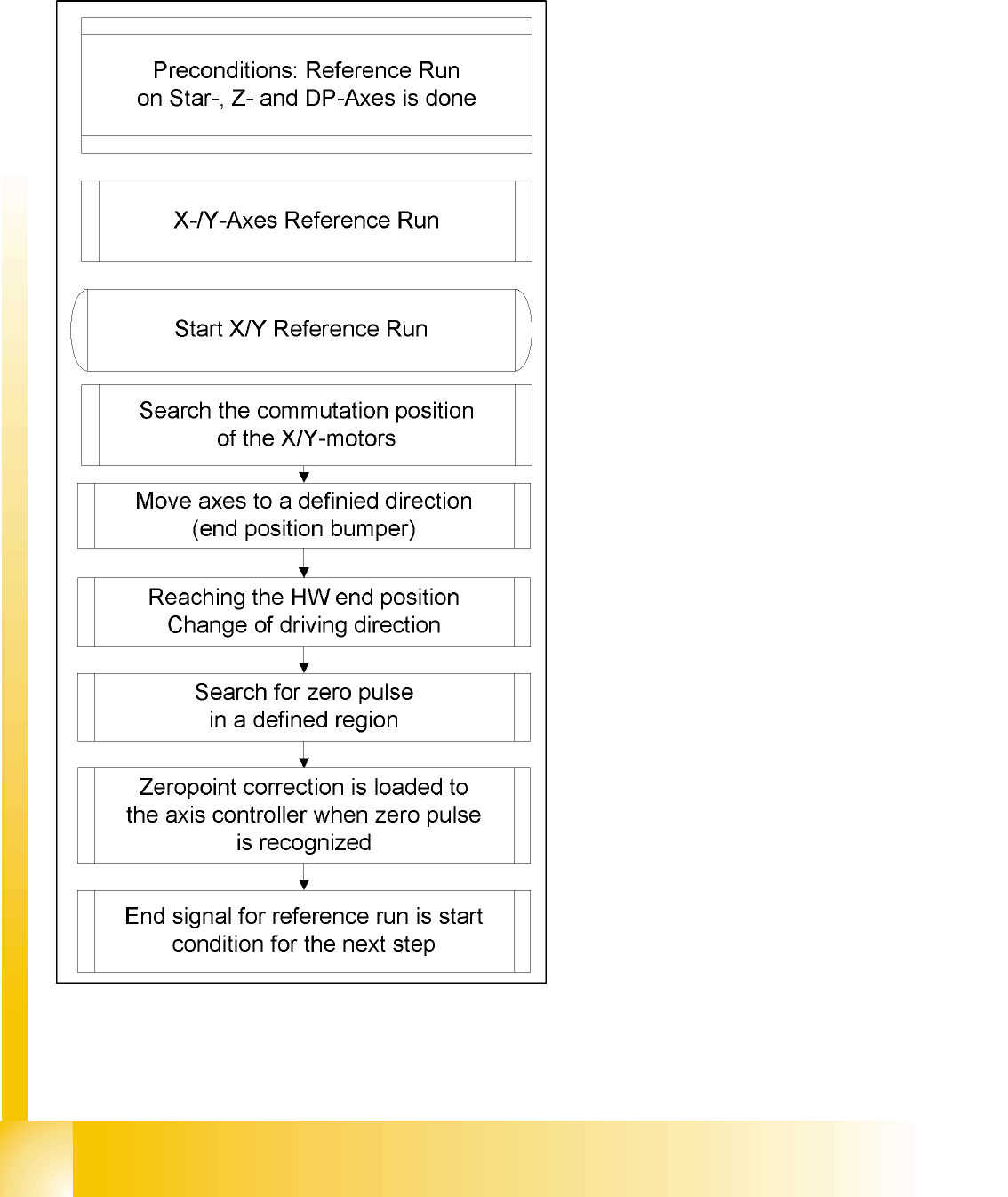
When performing a reference run with bumper
detection, proximity switch queries are no longer
used. Instead, the reference run continues until
the mechanical end stop (bumper) is reached. The
reference pulse is searched for in a set region of
the incremental scale.
The axis travel direction is reversed, if the set
target value is not reached by the axis(target value
≠ actual value). The zero pulse will then be
searched for in a set part of the incremental scale.
After reaching the zero pulse, the axis will stand in
a defined position.