00195193-02 SG D4 FSE en (1).pdf - 第113页
Reference run Reference Run C&P12 Overview Head Reference Run S tudent Guide SIPLACE D4 (FSE) Reference run EN 09/2006 106 5.3 Reference Run C&P12 General procedure The reference run p rocedure is identic al to…
Reference run
X and Y commutation position search Reference Run Gantry
Student Guide SIPLACE D4 (FSE)
EN 09/2006 Reference run
105
5.2.2 X and Y commutation position search
A commutation position search for the 3 phases AC-drives on the gantry starts right after the head axis
reference run is succesfully finished.
Starts reference run for main axes at all 4 gantries:
1. Reference motor commutation .
2. Referencing the measurement system.
After detecting the end position bumper, the axis searches for the zero pulse in a specific range . If
the axis detects several or no zero pulses, it will stop and an error message will be issued .
3. Approaching the zero point correction value
4. Reference run of main axes completed, height reference run starts
5.2.3 Reference run of X- and Y- axes
Starts reference run for main axes at all 4 gantries:
1. Commutating the motors
2. Referencing the measurement system.
After detecting the end position bumper, the axis searches for the zero pulse in a specific range . If
the axis detects several or no zero pulses, it will stop and an error message will be issued .
3. The axes are now in a defined position.
4. Reference run of main axes completed, height reference run starts
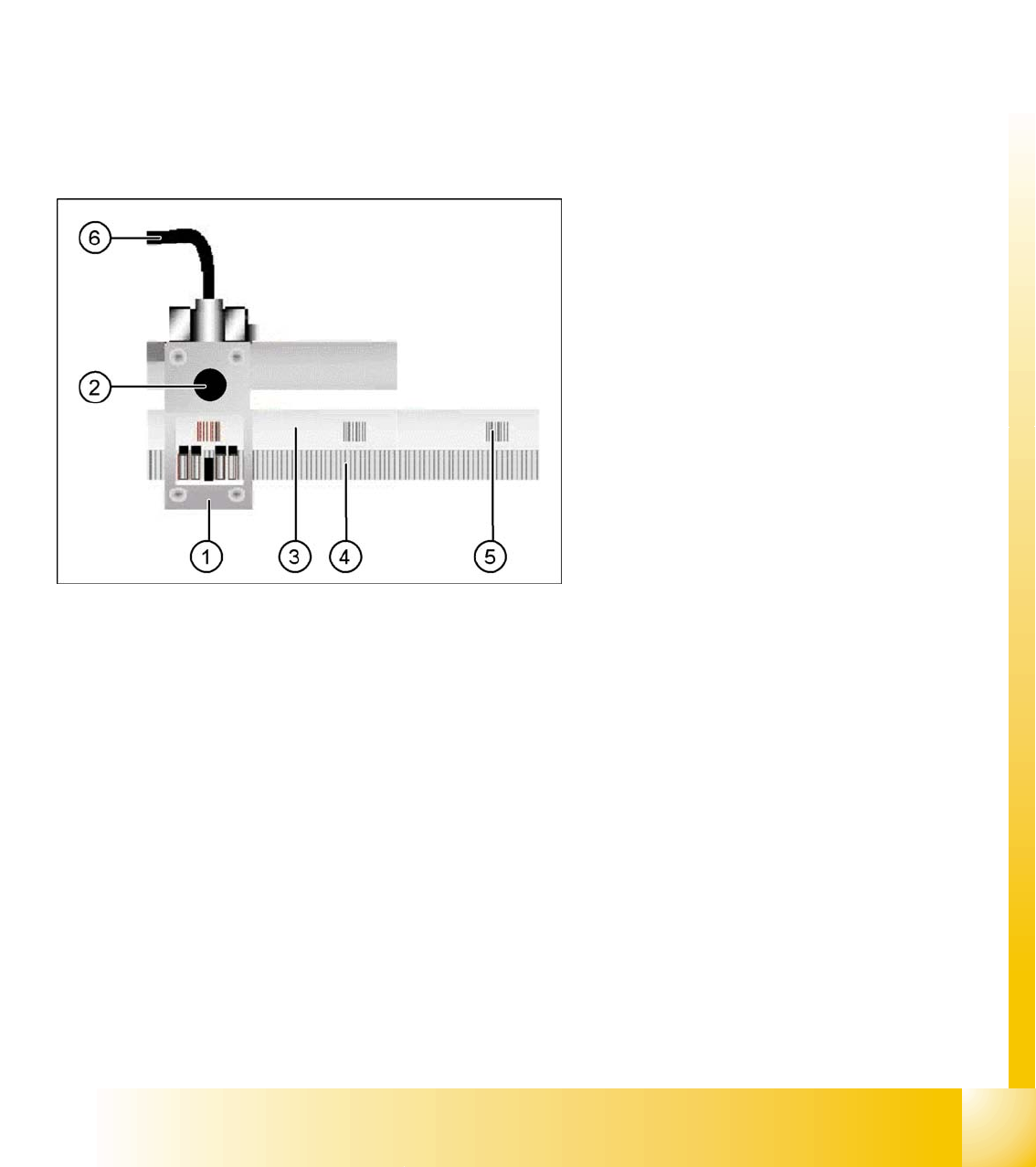
Legend:
1. Incremental encoder
2. Test plug for track signals (analog)
3. Incremental scale
4. Increments on the scale (1µm resolution)
5. Zero pulse
6. Connection cable to gantry distributor/gantry
head distributor
Reference run
Reference Run C&P12 Overview Head Reference Run
Student Guide SIPLACE D4 (FSE)
Reference run EN 09/2006
106
5.3 Reference Run C&P12
General procedure
The reference run procedure is identical to that for C&P12 type DLM3.
The reference run starts with the initialisation of all the head stepper motors. This allows then, the
head axis to reference by moving first to their zero pulses and then to their zero point correction
values.
In SIPLACE D4 machines, all heads and gantries move into the reference position at the same time.
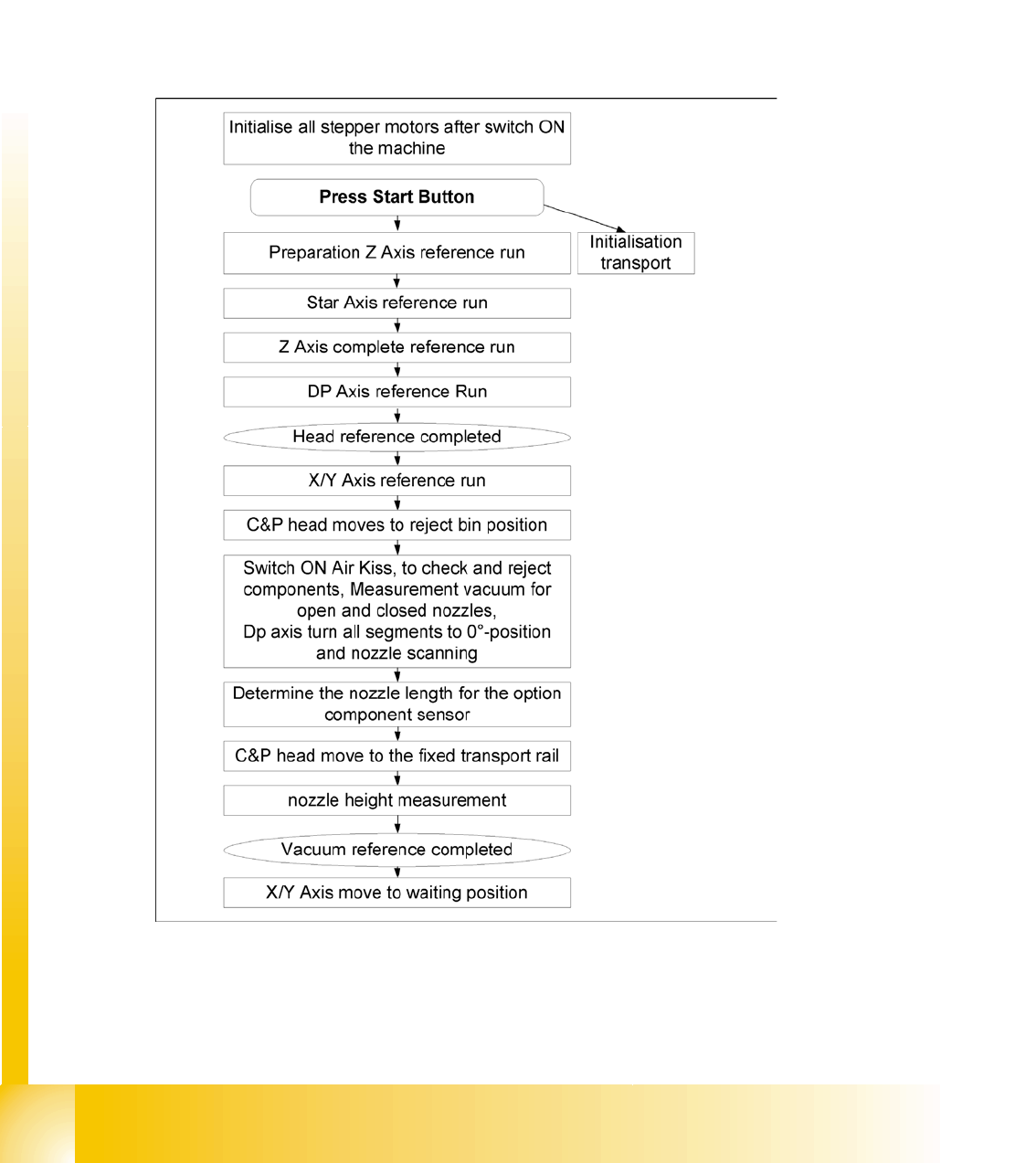
5.3.1 Overview Head Reference Run
5.3 - 1: General reference run in detail
Reference run
Initialization of the Stepper Motors Reference Run C&P12
Student Guide SIPLACE D4 (FSE)
EN 09/2006 Reference run
107
5.3.2 Initialization of the Stepper Motors
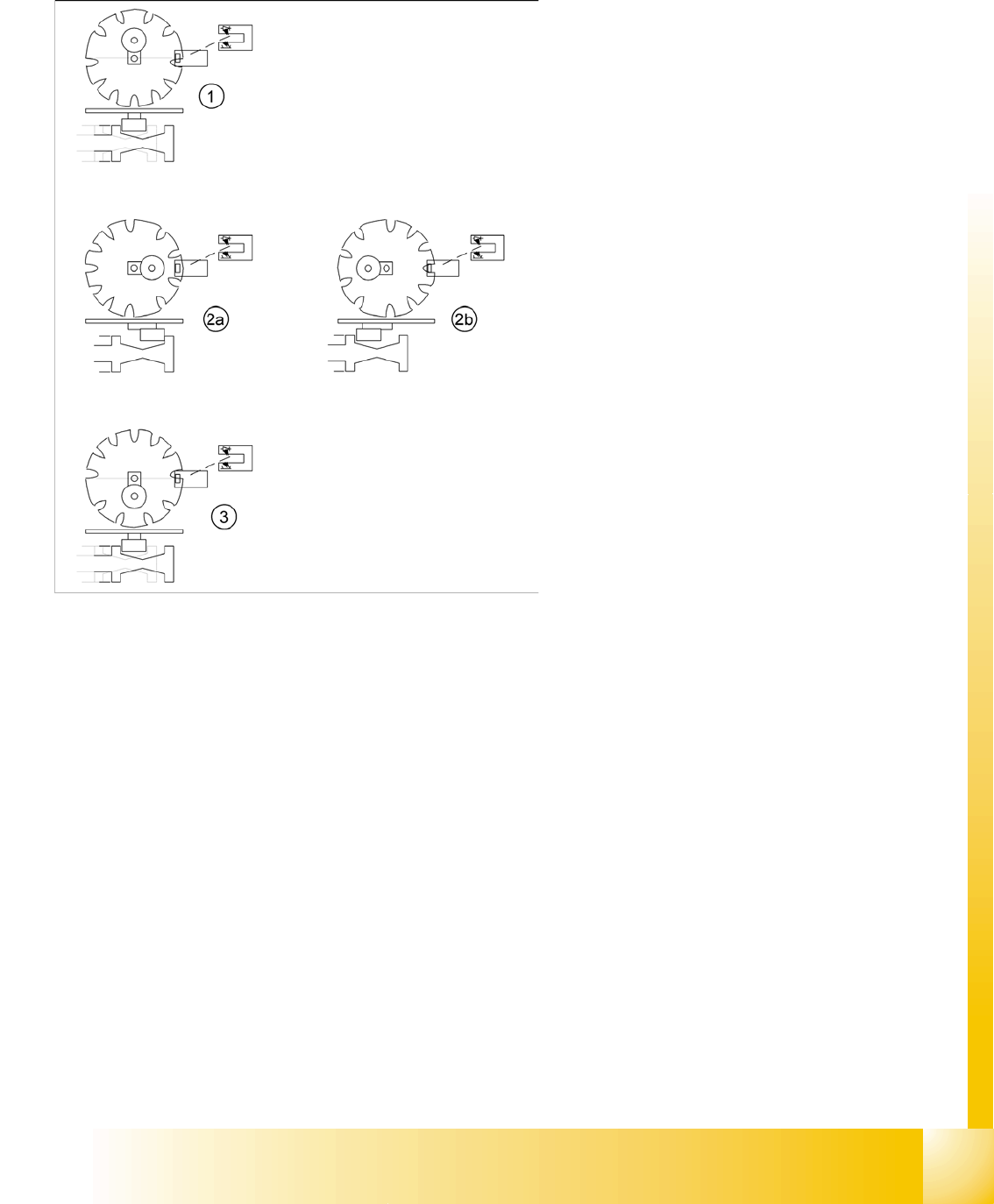
5.3.2.1 Initialization of Valve Positioning Drives for Pickup/Placement and Reject Positions
The stepping motor is used to move the plunger
(with eccentric movement), which then switches
on the vacuum supply and enables the component
to be picked up. During CO placement, the plunger
is triggered again to close the nozzle, so that air
kiss can be switched through to the nozzle for CO
placement. At CO release, the plunger switches
the air kiss on and the CO is released. After CO
release, the vacuum is switched back on again.
Legend:
1. Home position, initial position. Give way free
for Star axis movement. Drawing show 2
possible positions of the plunger
2. 2a: switches on vacuum, vacuum value
"Nozzle Open "
2b: switches on air kiss, vacuum value "Nozzle
Closed "
3. Counter position to initial position. Give way
free for Star axis movement.
– The stepper motor of the valve drive is
turned to the home position. The stepper
motor runs and the light barrier on the cam
disk sets the end signal.
– Because of the special shape of the cam
disk the stepper motor is able to recognize
the home position.