00195193-02 SG D4 FSE en (1).pdf - 第80页
Communication and Control CAN Bus protocol CAN Bus Student Guide SIPLACE D4 (FSE) EN 09/2006 Communica tion and Control 79 4.3.2.2 CAN Bus Arbitration Arbitration (arbitration means ar bitration) In CAN networks, there i…
Communication and Control
CAN Bus CAN Bus protocol
Student Guide SIPLACE D4 (FSE)
Communication and Control EN 09/2006
78
4.3.2 CAN Bus protocol
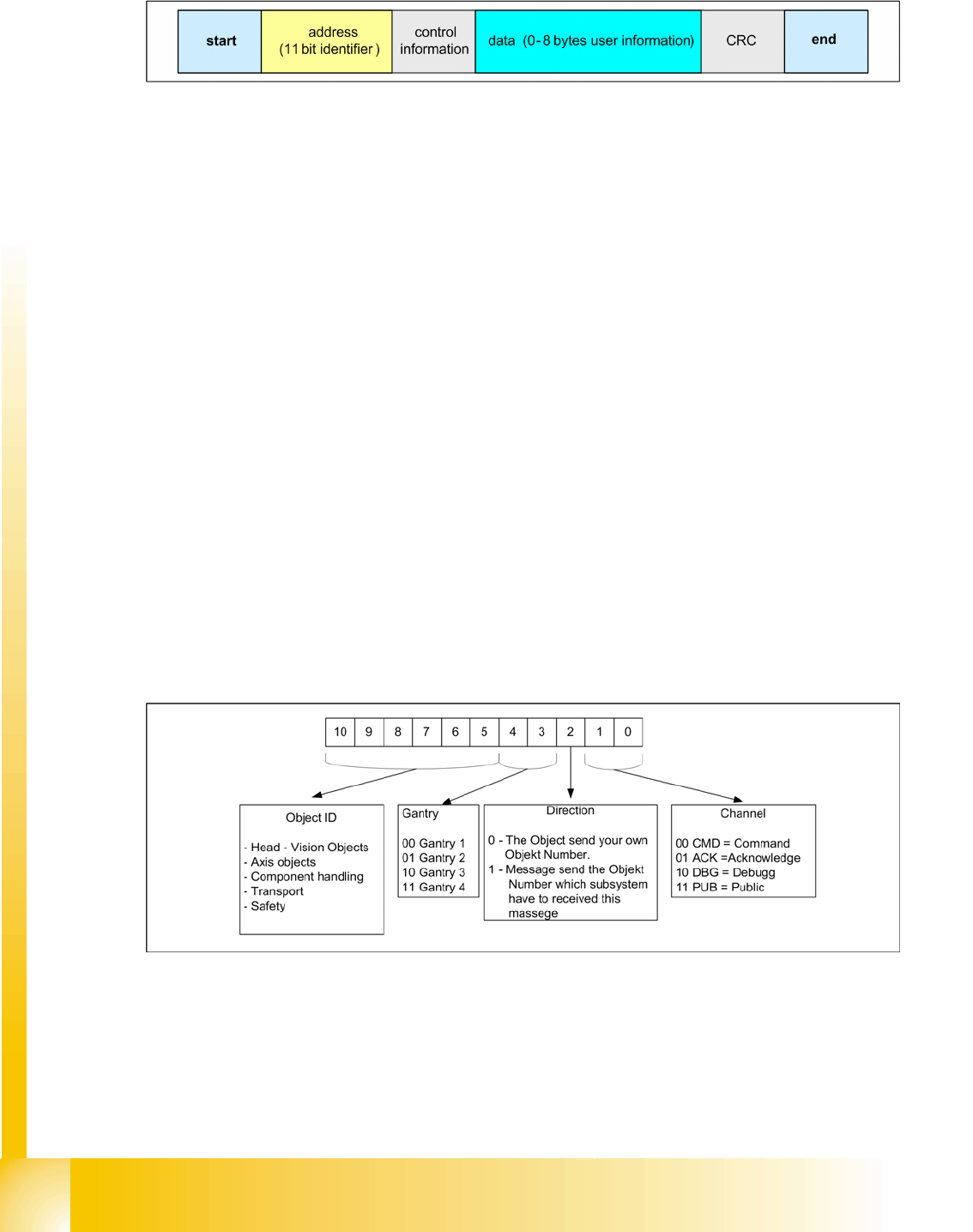
4.3 - 5: CAN-bus protocol
Start
This bit indicates the beginning of a telegram and consists of a dominant bit. After this bit is set, no
other user of the CAN bus is able to send.
Address field (11 bit identifier)
The 11 bit address identifier value determines the bus access . The value of this number is also the
priority for the bus access.
Control field
Contains reserved bits and 4 bit DLC: Data Length Code.
Data field
Contains the user information from 0 byte to maximum 8 byte. The transfer of a byte begins with the
most significant bit (the bit with the highest value).
Data control field CRC
Each message is combined with a CRC word. CRC sequence and CRC delimiter = CRC filed (cyclic
redundancy check): The redundant information in the control sequence allows the receiver to check
whether the message received has been falsified by interference.
End
The end of the length recognition is 7 bit.
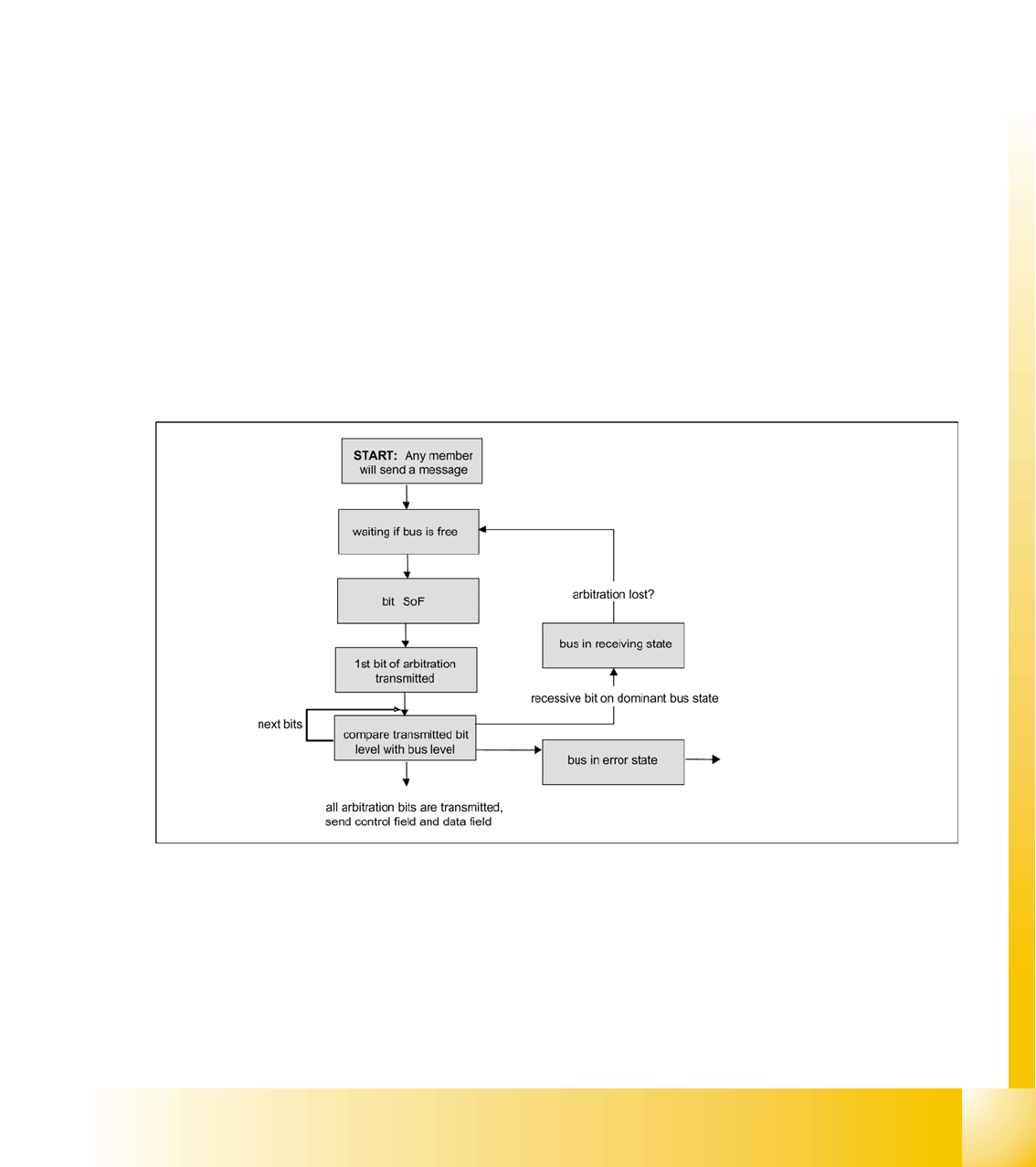
4.3.2.1 11 Bit Identifier
The CAN bus system is using the 11 Bit identifier for addressing the different CAN objects
An 11 Bit identifier (address) identifies the type, priority, source and /or target of the message.
This identifier also controls the bus access (arbitration).
4.3 - 6: 11 bit identifier
Communication and Control
CAN Bus protocol CAN Bus
Student Guide SIPLACE D4 (FSE)
EN 09/2006 Communication and Control
79
4.3.2.2 CAN Bus Arbitration
Arbitration (arbitration means arbitration)
In CAN networks, there is no addressing of subscribers or stations in the conventional sense, but
instead, prioritized messages are transmitted. Whenever the bus is free, any unit may start to transmit a
message. In general, a subscriber can only occupy the bus if this is free. The bus subscriber can detect
the bus occupation state by analyzing a certain time period within which the bus must be inactive.
A transmitter sends a message to all CAN subscribers (broadcasting). Each subscriber decides on the
basis of the identifier received whether it should process the message or not.
Bus access conflicts are resolved by including a message arbitration field (as a default the 11 bit identifier
is used).
The basis of this bit-wise arbitration is the differentiation of 2 physical bus levels, a dominant (low) and
recessive (high) bit.
A free bus is always on the recessive level. A DATA FRAME prevails over the REMOTE FRAME. During
arbitration every transmitter compares the level of the bit transmitted with the level that is monitored on
the bus. If these levels are equal the unit may continue to send.
When a recessive level is sent and a dominant level is monitored, the unit has lost arbitration and must
withdraw without sending one more bit. At the end of arbitration, the only subscriber left on the bus is the
one whose message has the lowest identifier value (logical zero is a dominant level). The lower the
identifier value is, the higher the priority of a message is.
When the bus is free any unit may start to transmit a message. The message sent by this subscriber is
not destroyed here i.e. it is a loss-free arbitration.
4.3 - 7: Flow chart bus arbitration
Communication and Control
CAN Bus CAN Bus protocol
Student Guide SIPLACE D4 (FSE)
Communication and Control EN 09/2006
80
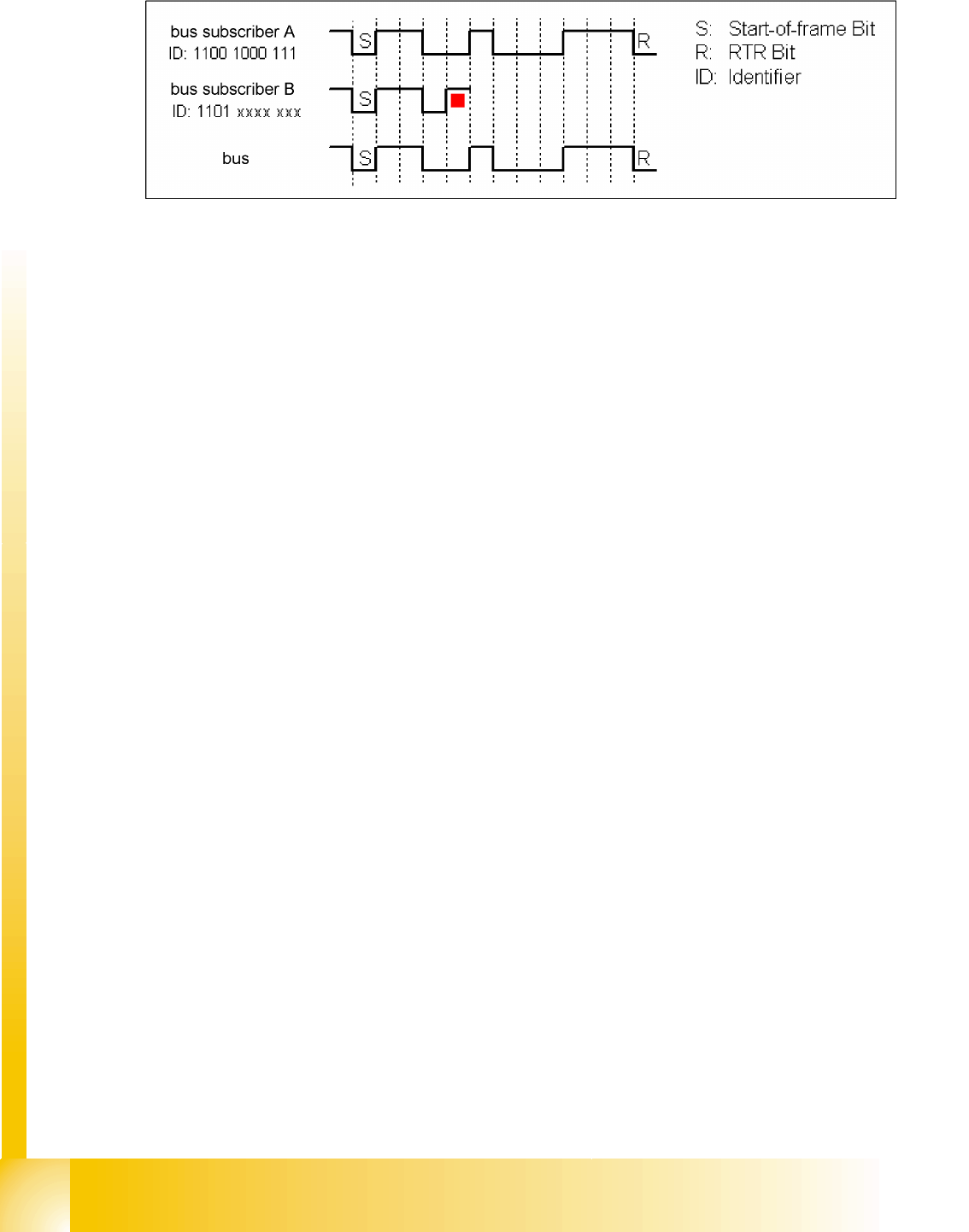
The following example shows arbitration by bit-wise scanning of the identifier by the 2 subscribers.
4.3 - 8: CAN bus arbitration example
If bus subscriber A and B want to transmit, they begin to do so after the start-of-frame bit and compare
in each case the bits sent and received. Since"0" dominates on the bus, bus subscriber B recognizes
that the fourth bit differs from the bits sent and therefore withdraws from the bus until the next start-of-
frame. Bus subscriber A does not recognize a difference and therefore continues to transmit. Messages
with high priority therefore have an identifier which begins with several "0"s.
There are two bus states possible during arbitration: dominant and recessive.
4.3.2.3 Errors on the CAN bus
Error frames
What are error frames?
Error frames are sent by the individual subsystems, if a command does not correspond with the
coding rules or if it has been corrupted i.e. when a CAN telegram has 6 or more consecutive bits with
the same level (high or low).
If a command is recognized by a subscriber, this subscriber immediately informs the other
subscribers and the telegram sender, by issuing an error frame.
Upon receipt of the error frame, all subscribers reject the telegram received and begin to send their
own error frames.
Once the bus is free again, the commend is resent.
If multiple error frames are issued, this indicates that a physical bus error has occurred. If too many
error frames are recognized during operation, a detailed analysis of the CAN signals is required.