NXT 系统手册 QD027-17.pdf - 第101页
QD027-17 4. 生产 NXT 系统手册 85 8. 请按 START 按钮开始生产。 备注 ) 被设定成应用搬运轨道搬运的模组不进行搬运轨道的宽度切换。 需要宽度切换时,请直接用手 旋转轴来进行。 此时, 需要调整电路板夹紧传感器的感度。 调整方法请参照机械手册的 [9. 测 定和调整 ]。 另外, 通过附加软件的远程控制操作, 执行 [ 搬运轨道传感器调整 ] 也可以调整传感器的感度。 (V2.71 以后)
4. 生产 QD027-17
84 NXT 系统手册
4.10 补充说明
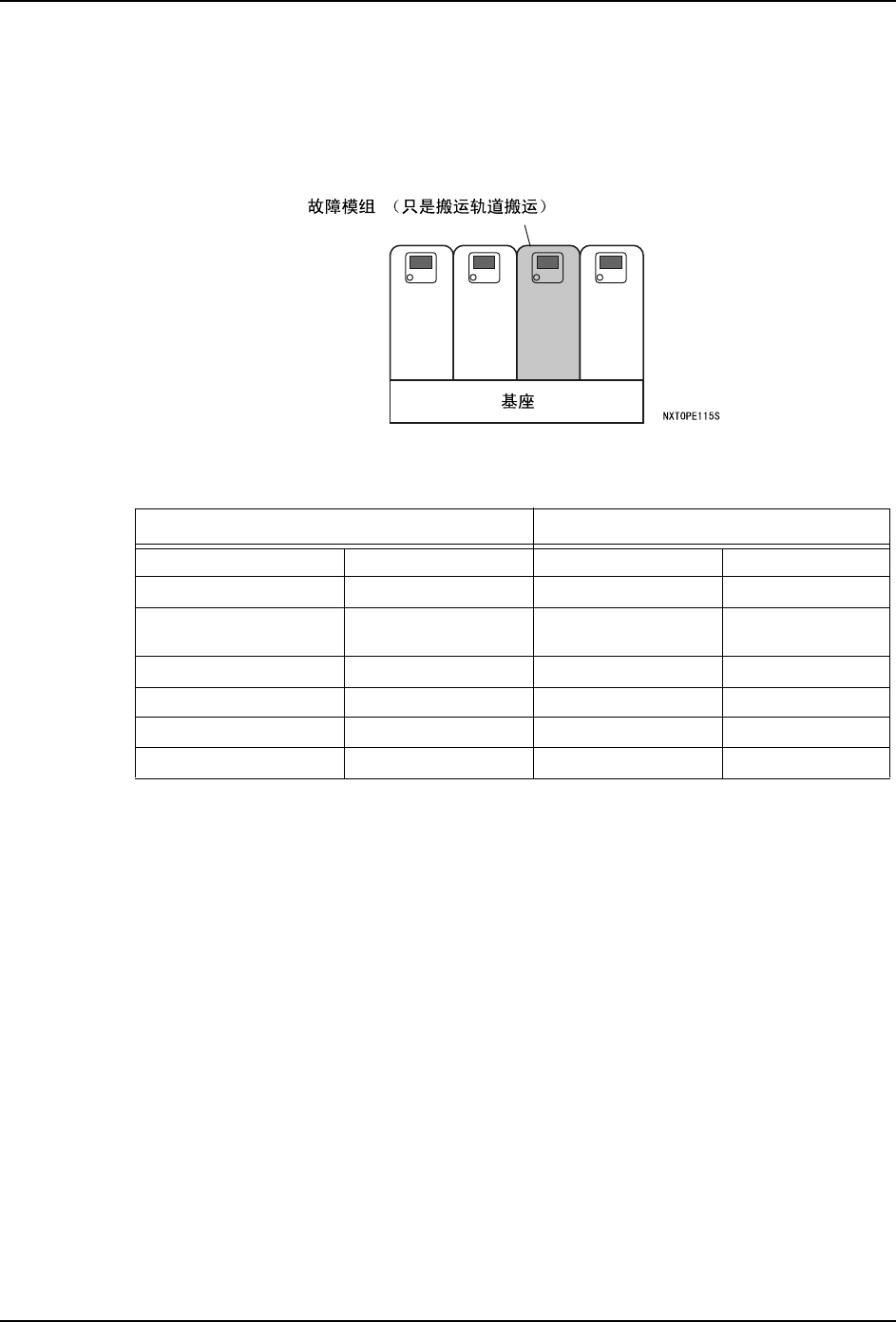
4.10.1 模组故障时的搬运轨道搬运的应用功能
模组内的单元或者伺服马达发生故障时,就不能进行基座上的全部生产线的生产。但是,尽
管有故障的模组,通过只应用搬运轨道的搬运,也能够继续生产线的生产。
首先,请确定故障部位。根据故障的部位,有可能不能应用搬运轨道的搬运。
可以应用时,请通过以下的步骤进行准备 , 然后重新开始生产。
1. 请查看模组内部,确认是否有生产中的电路板。如果有电路板,请通过送出运转或者手
动指令取除电路板。
备注 ) 送出运转、手动指令的操作都不能进行时,请从附加软件的远程控制指令中选择模组松开。
2. 拉出模组后,请关闭主开关。
3. 通过 Fuji Flexa 作成对应故障模组的 Job。编辑当前的生产中使用的 Job,请将分配给
故障模组的供料器和顺序分配给其他的模组。
备注 ) 优化时,请不要进行 [ 供料器的再配置 ]。有可能将供料器分配给故障模组。
4. 请打开主开关,进入睡眠模式。
5. 通过附加软件将故障的模组设定成应用搬运轨道的搬运。从 [ 模组功能设定 ] 中选择 [
故障时应用 ] 并设定成 [ 只是电路板搬运 ]。
备注 ) 如果是双模组,将左右双方的模组设定为搬运轨道搬运应用。
6. 请按 POWER 按钮变成唤醒模式并返回模组。
7. 请通过 Fuji Flexa 向机器传送 Job。
可以应用 不能应用
伺服放大器 伺服马达 CPU 电路板 伺服电路板
XY 机械手 机械手电缆 影像处理电路板 DIO
废料带处理单元 吸嘴更换器 远程控制 I/O 串行通信
(RS232C)
吸嘴置放台 定位相机 IEEE1394 操作面板
元件相机 料站单元 安全门
搬运轨道 模组控制箱
与气压有关
QD027-17 4. 生产
NXT 系统手册 85
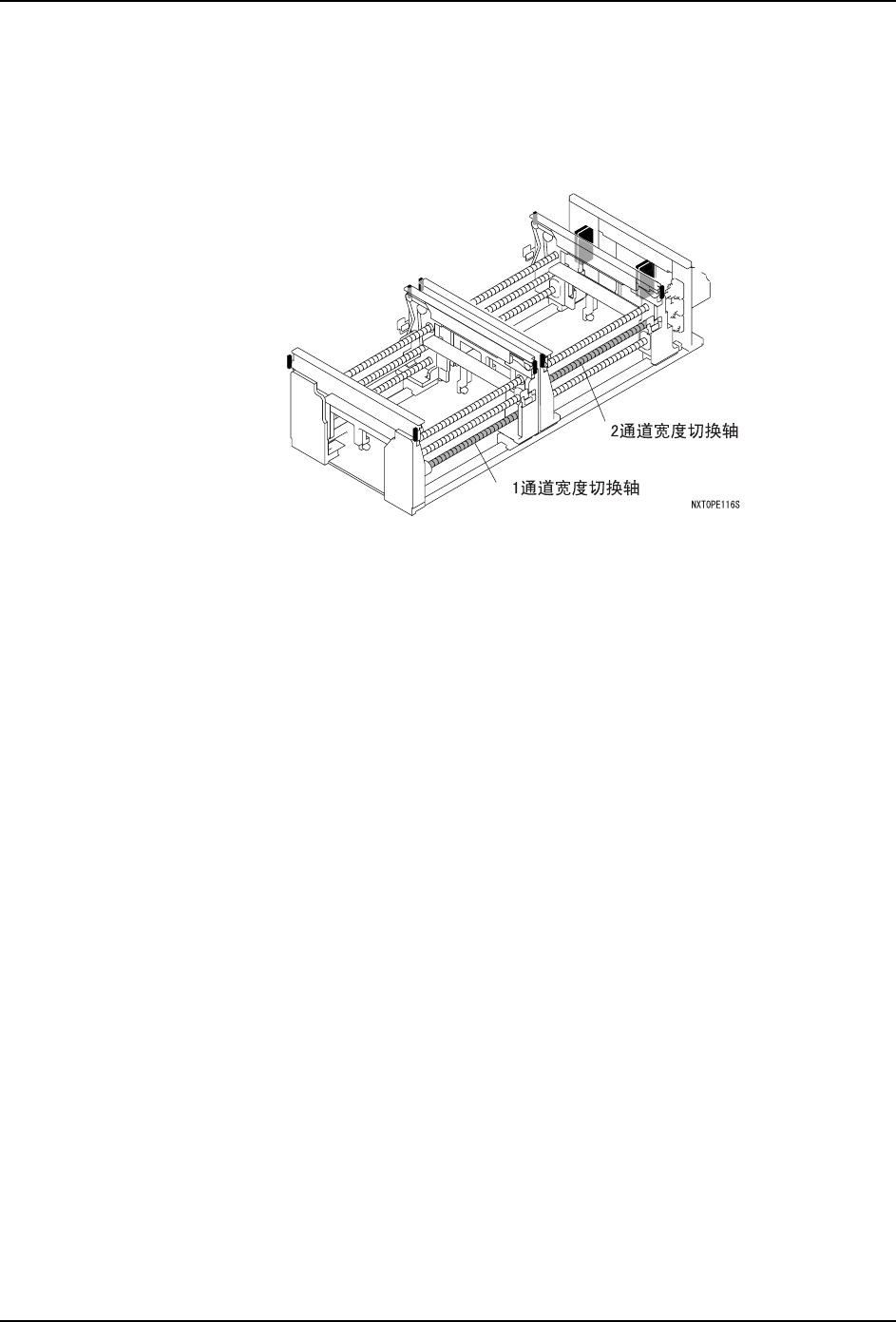
8. 请按 START 按钮开始生产。
备注 ) 被设定成应用搬运轨道搬运的模组不进行搬运轨道的宽度切换。需要宽度切换时,请直接用手
旋转轴来进行。此时,需要调整电路板夹紧传感器的感度。调整方法请参照机械手册的 [9. 测
定和调整 ]。
另外,通过附加软件的远程控制操作,执行 [ 搬运轨道传感器调整 ] 也可以调整传感器的感度。
(V2.71 以后)
4. 生产 QD027-17
86 NXT 系统手册
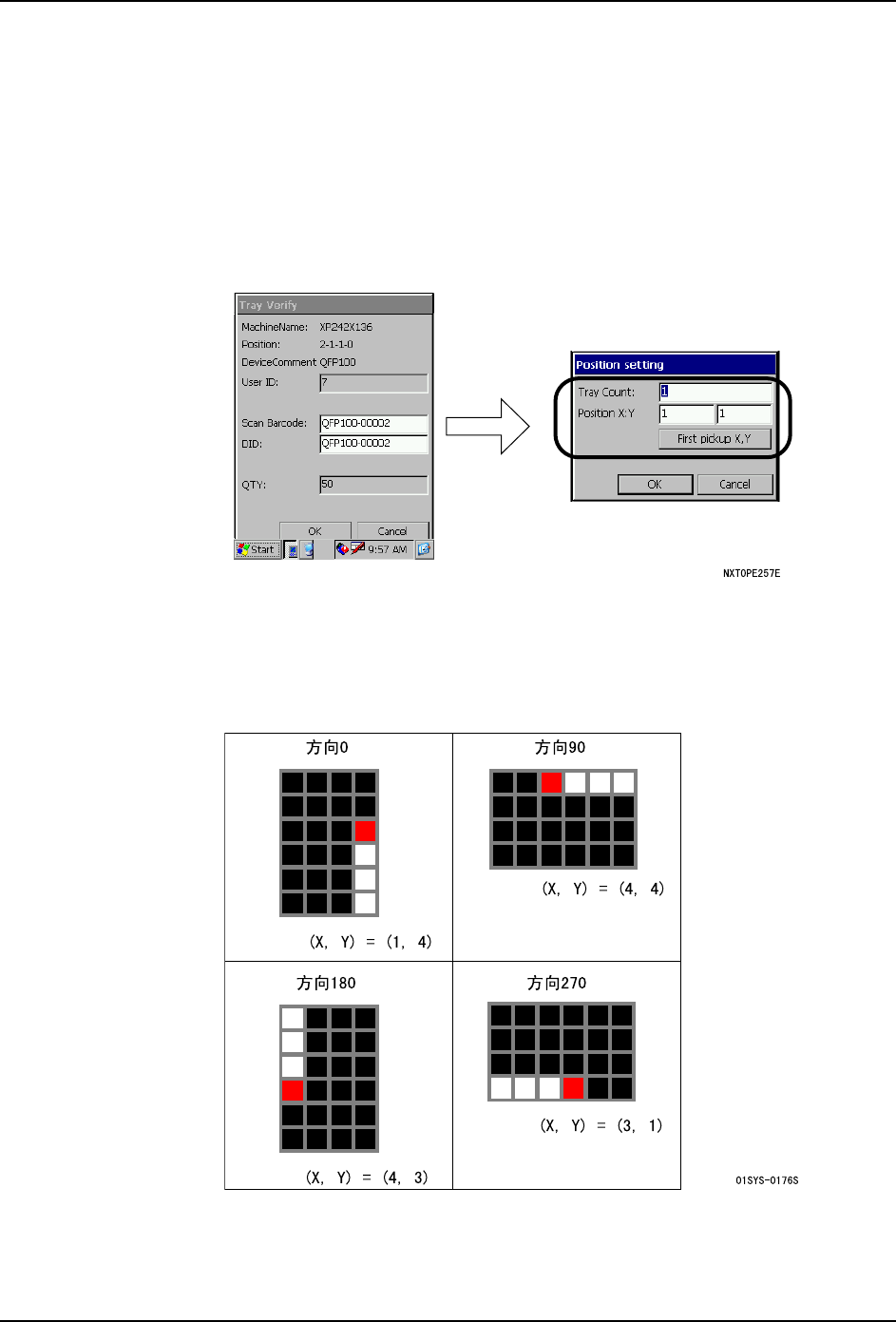
4.10.2 料盘元件吸取点的指定
在将料盘元件补充给料盘单元 -L 或者料盘单元 -M 时,通过在 KIT Handy 中输入的最初进行
吸取的元件的位置坐标,能够指定料盘元件的吸取开始点。
备注 ) 如果使用了 Fujitrax verifier,则支持该功能。
请在 KIT Handy 上进行以下的操作。
1. 请使用 KIT Handy 读取补充给料盘单元 -L/M 的料盘条形码。
2. 请输入最初进行吸取的元件的 X,Y 坐标。
备注 ) 此时,输入料盘以外或者不存在的元件的坐标,料盘元件的吸取点指定无效,通过对话框显示
出无效的通知。
3. 请点击 OK 按钮。
即使是相同的料盘,根据供应方向的不同,进行指定的值有所不同。