NXT 系统手册 QD027-17.pdf - 第233页
QD027-17 6. 手动模式指令 NXT 系统手册 217 5. 进行必要的清扫操作。 6. 在插入模组前, 请确认 XS 轴或者其他的机器的一部分是否突出。 轴突出时, 请将其轴移 动到正确的位置后插入模组。 7. 握住模组的手柄,在解除模组的锁定的 状态下,慢慢地将模组压入。 8. 将模组压入到碰到阻停块后不能动为止,模组自动地被夹紧。 尽管没有发生错误模 组却 不能自动夹紧时,请将模组稍微 朝自己方向拉回一些后重新推 入。 备…
6. 手动模式指令 QD027-17
216 NXT 系统手册
6.1 清扫指令
在进行清扫操作时使用。选择这个指令后按下 OK 后,模组就会被松开,处于能够拉出的状
态。
使用这个指令时,在松开模组时请注意不要发生受伤及损坏。模组松开后,因为模组要向前
方移动一些,在模组和基座之间有被夹住而受伤的危险。
6.1.1 操作步骤
1. 在 START 等待状态下按下 MANUAL 按钮,显示出手动指令。
2. 使用光标键,选择清扫示意图,按下 OK 按钮。
备注 ) 在安装着料盘单元 -L 的模组中当执行该指令,此处就会显示料盘单元 -L 卸下向导。请根据向
导画面卸下料盘单元 -L,之后进入下一步骤。
3. 在确认了模组前侧没有障碍物后按下 OK。模组自动地被松开后稍微向前移动一些。
备注 ) 模组没有松开时,请参考所显示的信息检查错误原因。M3(S) 模组没有被松开时,有可能其模
组的 XS 轴或者与其相邻的模组不在正确的位置 ( 冲入到相邻的模组内 )。
4. 握住模组的手柄后,模组的锁定被解除。在按住手柄的状态下将模组缓慢地拉出到碰到
阻停块为止。
备注 ) 在将模组朝自己方向拉出时,请不要将 XS 轴移动到超过模组宽度。在这种状态下返回模组时,
XY 机械手有与相邻的模组冲撞的危险。
01SYS-0121
注意
请不要把手或身体放入机器侧盖和基座之间的缝隙中。在拉出模组、松开
模组时有可能挤压手指而受伤。
警告
将几台模组处于半拉出状态时, 被拉出的台数有限制 (8M 基座上 M3(S)
模组到 4 台为止,4M 基座上 M3(S) 模组到 2 台为止)。
超过限制台数将模组拉出时, 机器整体会向前倾斜,有可能造成身体受
伤等。
QD027-17 6. 手动模式指令
NXT 系统手册 217
5. 进行必要的清扫操作。
6. 在插入模组前,请确认 XS 轴或者其他的机器的一部分是否突出。轴突出时,请将其轴移
动到正确的位置后插入模组。
7. 握住模组的手柄,在解除模组的锁定的状态下,慢慢地将模组压入。
8. 将模组压入到碰到阻停块后不能动为止,模组自动地被夹紧。尽管没有发生错误模组却
不能自动夹紧时,请将模组稍微朝自己方向拉回一些后重新推入。
备注 ) 如果卸下了料盘单元 -L,此处就会显示料盘单元 -L 推入向导。将料盘单元 -L 推入到模组后,
就会自动被夹紧。
9. 按下 MANUAL 按钮,返回到 START 等待状态。
警告
·将模组插入到基座时,为了防止负伤,请确认模组的后侧是否有人。
·在拉出 / 插入模组时,请不要将手指伸入到模组之间。有手指夹入模组
间而被切断的危险。
6. 手动模式指令 QD027-17
218 NXT 系统手册
6.2 工作头退避的指令
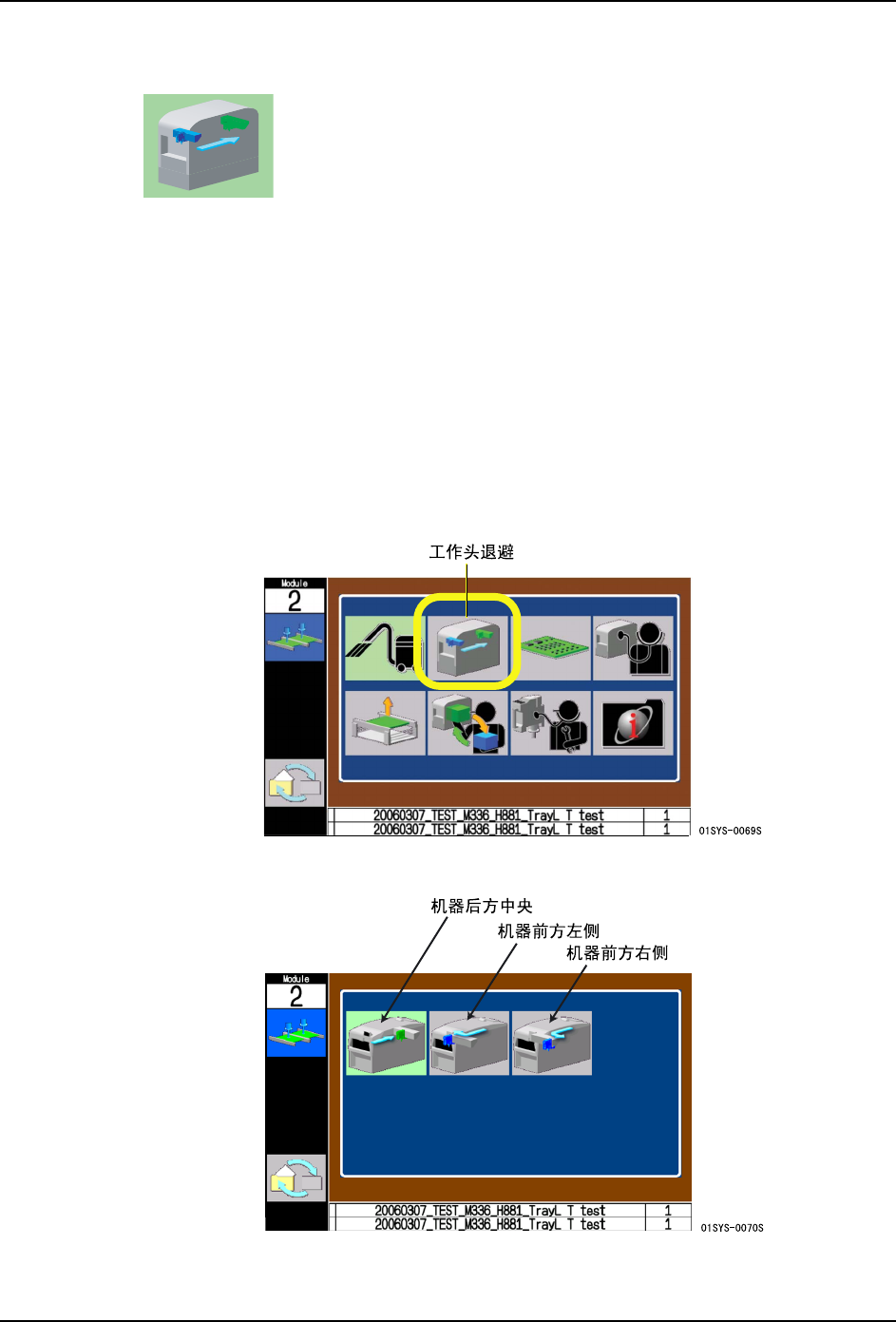
为了确保加油、清扫等的操作空间,使工作头退避的指令。退避位置可以从以下的 3 个位置
中选择。
·机器后方的中央:容易地取出电路板。
·机器前方的左侧:从左侧容易操作工作头。
·机器前方的右侧:从右侧容易操作工作头。
注意 ) 执行了该指令元件也不会被废弃。
6.2.1 操作步骤
1. 在 START 等待状态下按下 MANUAL 按钮,使手动指令显示。
2. 使用光标键,选择工作头退避示意图,按下 OK 按钮。
3. 使用光标键,选择工作头退避位置,按下 OK 按钮。
01SYS-0122