NXT 系统手册 QD027-17.pdf - 第291页
QD027-17 7. 附加软件 NXT 系统手册 275 7.11.14 模组的夹紧 以下说明夹紧模组的步骤。 通常将模组压入基座内时, 模组自动地被夹紧。 但是, 尽管没有发生错 误但模组仍然不能自 动地夹紧时,进行以下的操作, 可以将模组强制性地夹紧。 在进行下述操作前,请务必进行 安全的确认。 1. 选择需要夹紧的模组,单击 [ 远程操作 ]。 2. 单 击 [ 模组的夹紧 ]。 3. 在确认模组后方没有人后单击 [ 开始 ],…
7. 附加软件 QD027-17
274 NXT 系统手册
7.11.13 模组的松开
以下说明松开模组的步骤。
进行这个操作时,如果将超过在安全上的限制数的模组一次性从机器中拉出时,是极其危险
的。松开模组时,请务必在进行安全确认以后再进行操作。
1. 选择需要松开的模组并单击 [ 远程操作 ]。
2. 单击 [ 模组的松开 ]。
3. 单击 [ 开始 ] 后,将远程控制指令传输给机器。
4. 确认安全后,按下选择的模组的操作面板的 OK 后,就会松开模组。
警告
将几台模组处于半拉出状态时, 被拉出的台数有限制 (8M 基座上 M3(S)
模组到 4 台为止,4M 基座上 M3(S) 模组到 2 台为止)。
超过限制台数将模组拉出时, 机器整体会向前倾斜,有可能造成身体受
伤等。
注意
请不要把手或身体放入机器侧盖和基座之间的缝隙中。在拉出模组、松开
模组时有可能挤压手指而受伤。
QD027-17 7. 附加软件
NXT 系统手册 275
7.11.14 模组的夹紧
以下说明夹紧模组的步骤。
通常将模组压入基座内时,模组自动地被夹紧。但是,尽管没有发生错误但模组仍然不能自
动地夹紧时,进行以下的操作,可以将模组强制性地夹紧。
在进行下述操作前,请务必进行安全的确认。
1. 选择需要夹紧的模组,单击 [ 远程操作 ]。
2. 单击 [ 模组的夹紧 ]。
3. 在确认模组后方没有人后单击 [ 开始 ],就会夹紧模组。
7.11.15 设定生产模式的运转
生产模式有:[ 传送模式 ]、[ 通常生产模式 ]、[ 空转运转 (影像处理、供料器不送料)]
和 [ 空转运转 (不搬运电路板、VT253)] 的模式。
选择传送模式后,只进行电路板搬运。选择空转运转 (影像处理、供料器不送料)后,就
不进行电路板上的定位点或元件的影像处理及供料器的元件传送动作。另外,选择空转运转
(不搬运电路板、VT253)后,就会进行元件的吸取、供料器的元件传送动作,按照 Vision
Type 253 进行所有元件的影像处理。此时,不进行模组之间的电路板的搬运 / 送出动作。选
择 [ 通常生产模式 ] 后,就会返回到通常生产模式。
1. 选择设定为空转的模组,单击 [ 远程操作 ]。
2. 从一览表中选择使用的生产模式。
3. 单击 [ 开始 ] 后,就会将指令传输给选择的模组。
4. 指令的传输结束后,单击 [ 关闭 ],返回到远程控制指令菜单。
警告
模组在插入到基座时,请确认模组后面没有人。模组与基座之间有可能压
着身体和手指而受伤。
在拉出和插入模组时,不要将手伸入到和边上的模组之间处。模组之间有
可能夹住,压断手指。
7. 附加软件 QD027-17
276 NXT 系统手册
7.11.16 搬运轨道校正
搬运轨道校正为当出现以下的错误,搬运轨道不能正常动作时,进行恢复的功能。
进行搬运轨道校正时,机器的 START 按钮处于可以按下的状态。请进行以下的确认。
·安全继电器为 ON。
·对象模组上,安装有料站供料托架或者料盘单元 -L。
·对象模组的邻接模组的安全门关闭,紧急停止开关处于解除状态。
·邻接模组被插入,电源处于 ON 的状态。
·双模组的情况时,对方模组的 START 按钮也处于可以按下的状态。
1. 选择要进行搬运轨道校正的模组,单击 [ 远程操作 ]。
2. 单击[搬运轨道校正]。
3. 单击[开始]
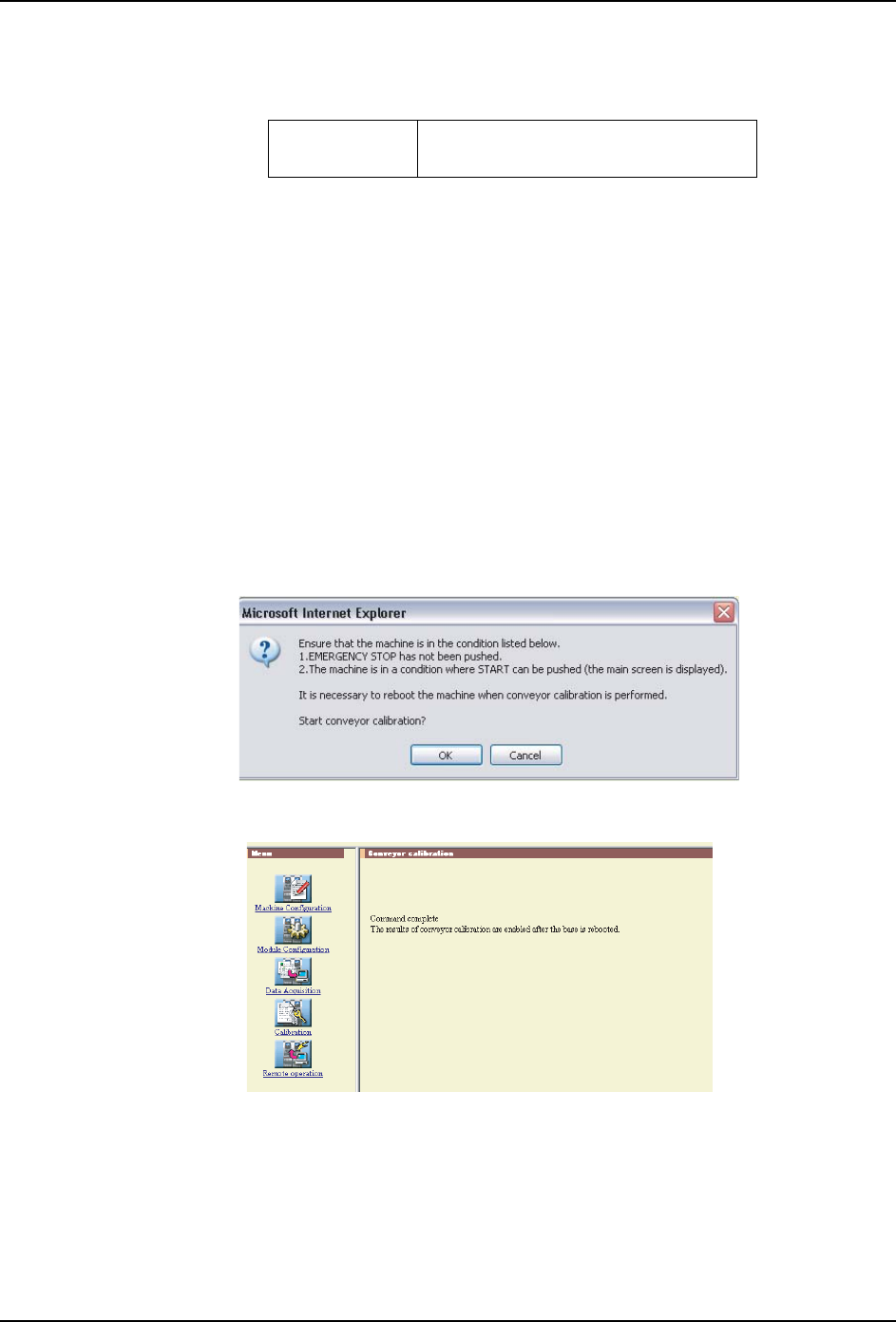
4. 显示出以下的对话框。单击 [OK] 后,开始搬运轨道校正。
5. 搬运轨道校正正常结束后,显示出指令结束的信息。此后请重新启动机器。
错误编码 "****0701" "****0703" "****0704"
"****0708" "****071D" "****0752"
01SYS-0178E
01SYS-0179E