GD450使用说明书 - 第24页
- 24 - 第三章 生产工作流程 K , [ 自动查找 ] :系统自动识别选定类型 Mark 点; L , [ 模板控制操作 ] :设定搜索范围,并当自动查找失败时手动设置 MARK 点; M , [ 实时显示 ] :实时显示图像,手动设置 MA RK 点使用; N , [ 采集图像 ] :采集当前图像,手动设置 M A RK 点使用; O , [ 搜索范围 ] :在视域中划出一个区域后点击该按钮设定搜索范围,系统只在该范围 中识别 …
- 23 -
第三章
生产工作流程
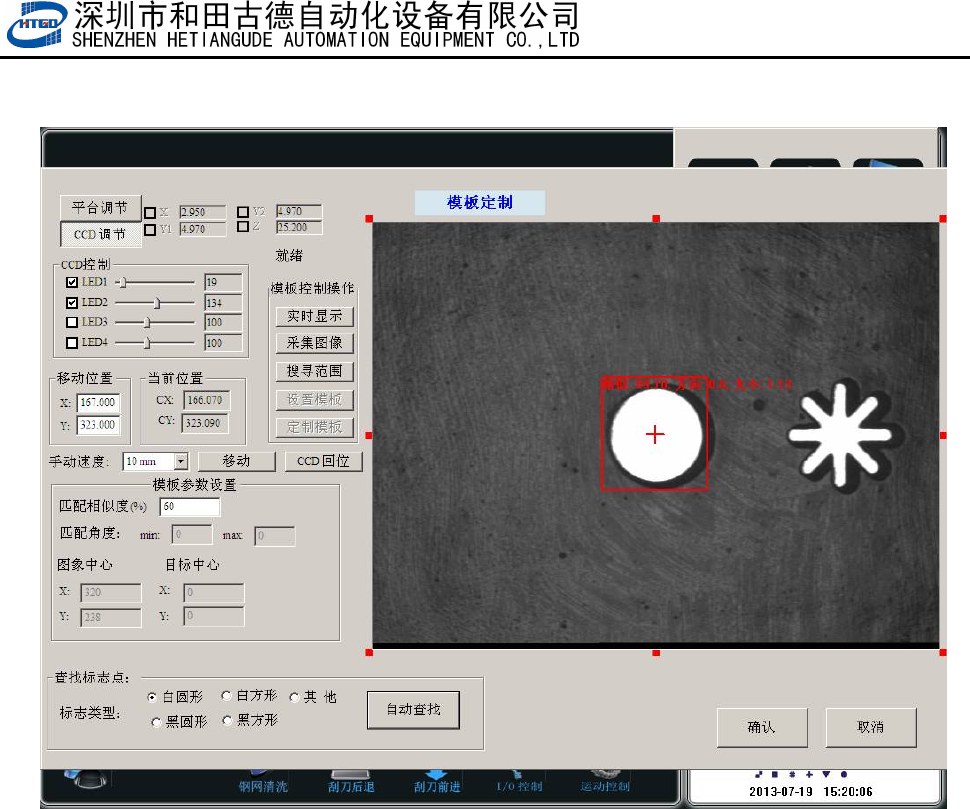
图 3-15(在图 3-13 上点[PCB 标志 1]打开此界面, PCB Mark 点出现在视域中,点[自
动查找],Mark 点捕捉到,如图)。
注:各按钮功能解释
A,[平台调节]:点击输入密码后调节平台的高度,平面位置等;
B,[CCD 调节]:移动 CCD 位置;
C,[LED 1,2,3,4]:调节 LED 灯的亮度
D,[手动速度]:使用键盘上方向键移动 CCD 的速度;
E,[匹配相似度]:MARK 点质量匹配分数设定分数越高,Mark 点越难设别,精度越
高;反之反是;
F,[移动位置]:修改里面的参数后点[移动],CCD 会移动到对应的坐标上去;
G,[当前位置]:显示当前 CCD 的坐标;
H,[CCD 回位]:点击后 CCD 回到原点位置;
I, [移动]:点击后 CCD 从[当前位置]移动到[移动位置];
J,[标志点类型]:5 种选项供勾选;
- 24 -
第三章
生产工作流程
K,[自动查找]:系统自动识别选定类型 Mark 点;
L,[模板控制操作]:设定搜索范围,并当自动查找失败时手动设置 MARK 点;
M,[实时显示]:实时显示图像,手动设置 MARK 点使用;
N,[采集图像]:采集当前图像,手动设置 MARK 点使用;
O,[搜索范围]:在视域中划出一个区域后点击该按钮设定搜索范围,系统只在该范围
中识别 Mark 点,该功能用在视域中有 2 个以上相似 Mark 点时。用于过滤掉不需
要识别的 Mark 点;
P,[设定模板]:在视域中标示一个图像范围,点击『定制模板』系统将该范围中图形
识别为 Mark 点模板,
Q,[定制模板]:将设定的图形范围作为 MARK 点模板;
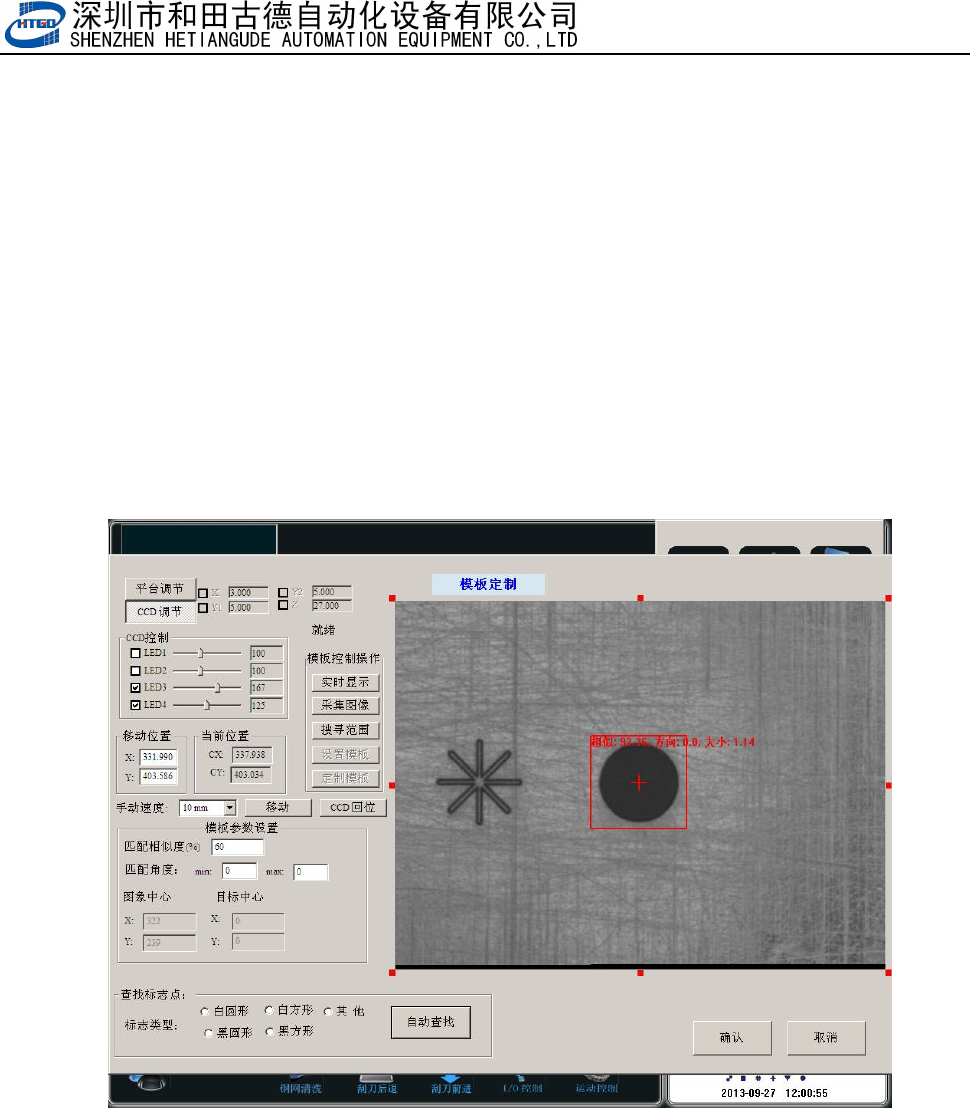
图 3-16 钢网 Mark 点的匹配,匹配完成后点击[确定]
9,在图 3-15 中调节 Led1、LED2 的亮度,使 Mark 和周围背景颜色区分开,一直调到 Mark
点轮廓清晰,黑白分明方可。然后点击[自动查找]按钮,系统会自动捕捉到 Mark 点,点击[确
定]完成 Mark 点的抓捕,回到图 3-13 界面。[钢网标志 1] [PCB 标志 2] [钢网标志 2]Mark 点
的捕捉跟[PCB 标志 1]一样方法。
10.钢网和 PCB 的 Mark 点匹配完成后在图 3-13 界面上点击[ 确认 ]按钮进入图 3-14 界面,
再点击[ 是 ]按钮回到主界面,至此,完成 Mark 点的匹配。

- 25 -
第三章
生产工作流程
3.2.4 刮刀压力和速度的选择
刮刀的压力及刮刀速度是钢网印刷中两个重要的工艺参数。
刮刀速度:
选取的原则是刮刀的速度和锡膏的粘稠度及 PCB 板上 SMD 的最小引脚间距
有关,选择锡膏的粘稠度大,则刮刀的速度要低,反之亦然。对刮刀速度的选择,一般先从
较小压力开始试印,慢慢加大,直到印出好的焊膏为止。速度范围为 15~50mm/s。在印刷
细间距时应适当降低刮刀速度,一般为 15~30mm/s,以增加锡膏在窗口处的停滞时间,从
而增加 PCB 焊盘上的锡膏;印刷宽间距元件时速度一般为 30~50mm/s。(>0.5mm pitch
为宽间距,<0.5mm pitch 为细间距〕
本机器刮刀速度允许设置范围为 0~200mm/s。
刮刀压力:压力直接影响印刷效果,压力以保证印出的焊膏边缘清晰,表面平整,厚度
适宜为准。压力太小,锡膏量不足,产生虚焊;压力太大,导致锡膏连接,会产生桥接。因
此刮刀压力一般是设定为 0.5~10kg。
3.2.5 脱模速度和脱模长度
脱模速度:指印刷后的基板脱离模板的速度,在焊膏与模板完全脱离之前,分离速度要
慢,待完全脱离后,基板可以快速下降。慢速分离有利于焊膏形成清晰边缘,对细间距的印
刷尤其重要。一般设定为 3mm/s,太快易破坏锡膏形状。
本机器允许设置范围为 0~20mm/s。
PCB
与模板的分离时间:即印刷后的基板以脱板速度离开模板所需要的时间。时间过长,
易在模板底面残留焊膏,时间过短,不利于焊膏的站立。一般控制在 1 秒左右。
本机器用脱模长度来控制此变量,一般设定为 0.5~2mm。本机器允许设置范围为 0~
10mm。
3.3 试生产
在以上准备工作做完以后,即可进行 PCB 板的试印刷。操作方法是:
1. 单击主工具栏中的[ ]按钮,出现图 3-18 界面,在该界面上勾选显示调节窗口,
然后点击[确定]按钮回到软件主界面。
2. 在软件主界面上点击[ ]按钮,接下来按软件提示操作进入生产模式,机器在完成
PCB 运输,定位,取像,Z 轴上升到印刷位置后,出现图 3-18 画面。
3. 在 3-18 界面下,检查 PCB 是否和钢网紧贴,要求是 PCB 刚好挨着钢网,否则需调节
Z 轴高度,直到满足要求。检查 PCB 焊盘是否和钢网网孔重合,如不重合,则需要调
整平台 X、Y1、Y2,直到重合为止。