GKG_G3印刷机操作说明书 - 第25页
凯格 精 密机械有限公司 - 25 - 第 四 章 操作系统 说明 对 话 框 , 如 图 4 – 16 所 示 , 等 待 人 工 清洗网 板 , 步 骤 如 下 : 图 4- 1 6 〈 人 工 清洗 〉 对 话 框 Ø 在 “人 工 清洗 ” 对 话 框 中 单 击 “ 打 开 门 开 关 ” 按 钮 , 将 机 器 前 罩 门 打 开 , 并 单 击 “ C CD 回 位 ” 按 钮 ,使 CCD 部分 回 到 原 点 位置 。…
凯格精密机械有限公司
- 24 -
第四章
操作系统说明
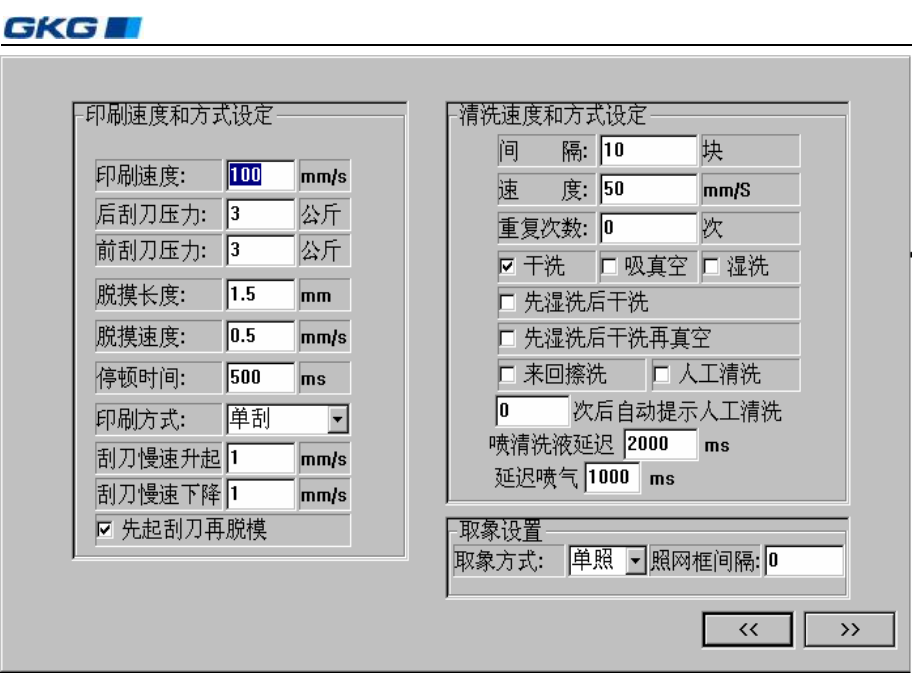
图 4-15 〈参数设置 2〉对话框
对话框进入方式:[数据录入]+ [密码输入]+ [>>]
l 如可设置刮刀压力、刮刀速度、前后刮刀同钢网慢速升降的速度、选择单刮或双刮及刮
刀的运行方向;脱模的方式;可选择“干、湿、吸真空、先湿洗后干洗、先湿洗后干洗
再真空、来回檫洗”自动清洗方式及清洗的速度和时间间隔,也可选择行动的“人工清
洗方式”;可设置标志点图标类型;清洗具体动作设定;
l 可设置视觉校正的取象方式——双照和单照;还可对双照模式照钢网的循环次数。
说明:
1) 前后刮刀可设置各自的压力值,刮刀慢速下降是指刮刀在接触钢网后开始给刮刀产生压
力的速度;刮刀慢速升起是指刮锡完成后刮刀的退刀速度。
2) 先起刮刀再脱模是指脱模的一种方式;若不选择则脱模为先脱模再起刮刀;GKG 脱模
还有一种脱模方式:刮刀先可按照设定的上升距离(可在机器参数内设定)上升(比如
先退刮刀压力)再脱模最后起刮刀。
3) 在设置视觉校正的取象方式时,如选择双照,则按照照网框间隔来执行:如设置为零则
每一次均会照网框,设置一则每两次进板照钢网。
4) 如在此对话框中选择手动的“人工清洗方式”,在正常生产过程中,机器会按此对话框
中所输入的“清洗间隔”参数生产完一定数量的产品后自动停下,并出现“人工清洗”
凯格精密机械有限公司
- 25 -
第四章
操作系统说明
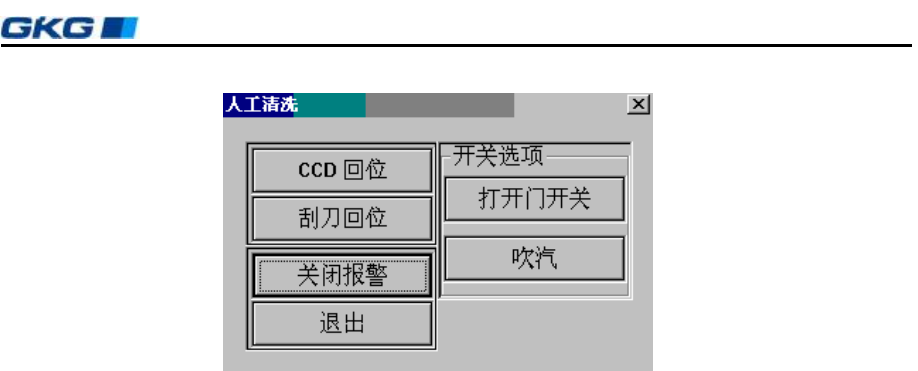
对话框,如图 4–16 所示,等待人工清洗网板,步骤如下:
图 4-16 〈人工清洗〉对话框
Ø 在“人工清洗”对话框中单击“打开门开关”按钮,将机器前罩门打开,并单击“CCD
回位”按钮,使 CCD 部分回到原点位置。
Ø 此时可将手伸到网板下进行人工清洗网板。
Ø “刮刀回位”是指刮刀脱离钢网回到起始位
Ø 清洗完成后将前罩门关闭,并按下机器操作面板上的继续操作“START”按钮,黄
色指示灯会亮,机器继续开始生产。
Ø “关闭报警”是指出现提示三色灯亮红灯且蜂鸣器会叫,按此按纽可将以上动作复位重
新进入正常生产。
6. 在以上参数设置好以后,单击上图右下角[《 》对话按钮,回到[参数设置 1]对话框;
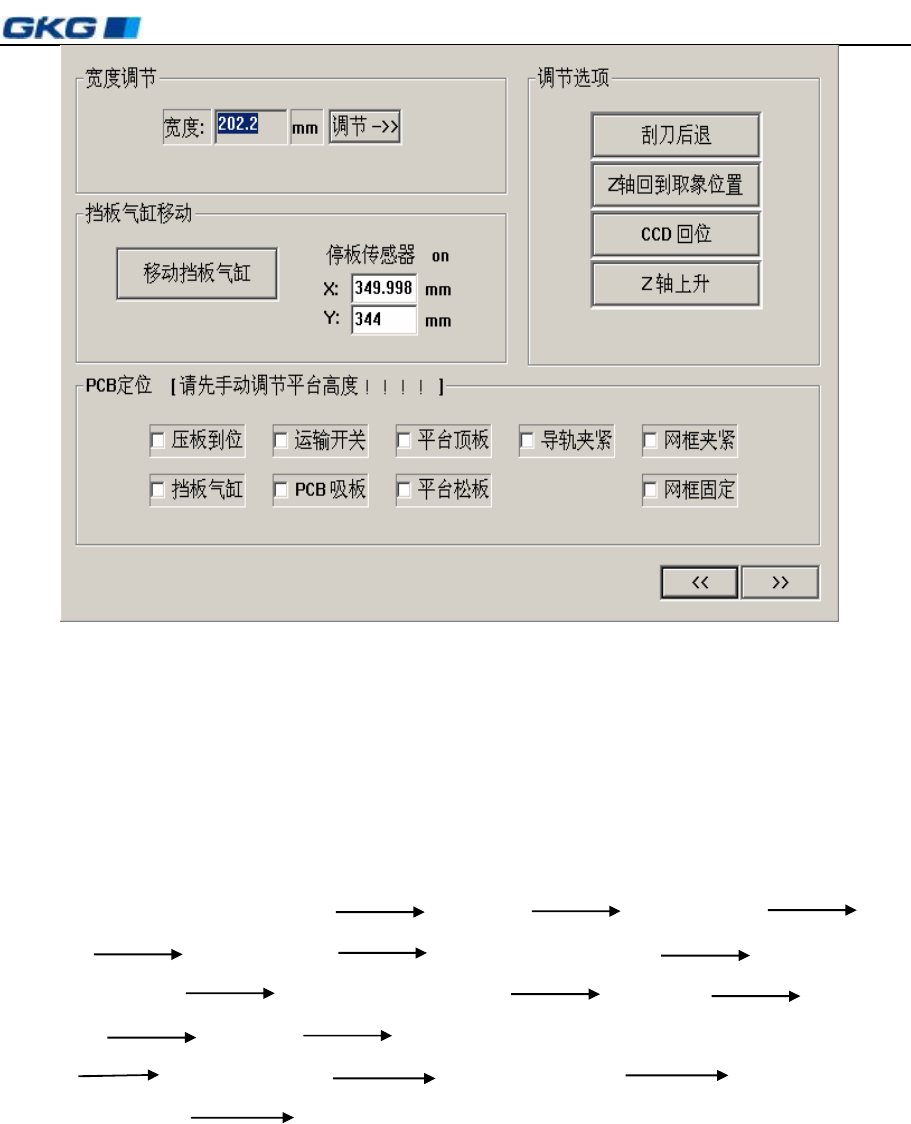
单击右下角[PCB 定位]对话按钮即可进入[PCB 定位]对话框,如图 4–17 所示:
l 宽度 “调节”按纽对导轨宽度作调整
l “移动挡板气缸”指将 CCD 移动到 PCB 进入导轨停在坐标显示的位置
l “压板到位”导轨上的压板装置回到原位不压板的状态
l “挡板气缸”阻挡 PCB 的气缸的动作状态:若选择则处于阻挡的状态,反之处于过板的状
态. 在阻挡的状态时 CCD 是不可移动.
l “运输开关”,” PCB 吸板 “为基本动作
l “平台顶板”是指将 PCB 板升至同导轨上压板等高度的位置; ”平台松板”是指 PCB 落在
导轨上,没被顶针顶起;”导轨夹紧”指将 PCB 顶起后侧向将 PCB 夹紧.
l “网框夹紧”指锁住网框;”网框固定”指调节不同宽度的网框对应的宽度动作
l “刮刀后退”指将刮刀退到后起刮点
l “Z 轴回到取像位置”指平台升到可以取像的高度位置;”Z 轴上升”是指平台升到可印刷
的位置
l “CCD 回位”是指 CCD 回到原点位置
凯格精密机械有限公司
- 26 -
第四章
操作系统说明
图 4-17 〈PCB 定位〉对话框
对话框进入方式:[数据录入]+ [密码输入]+ [参数设置 1] +[参数设置 2]+ [PCB 定位]
4.4.4[PCB 定位]
在[PCB 定位]对话框中可进行“开关控制”、“运输宽度调节”、“挡板气缸移动”、“CCD
回位”、“平台顶板”、“Z 轴回位”、“CCD 回位”等参数选择。
1. PCB 定位调试的操作程序
首行要确认 PCB 顶升平台高度 打开上压板 移动挡板气缸 打开
停板气缸 打开运输开关 PCB 从入 口 处进 板 关闭运输开关
打开 PCB 吸板阀 关闭停板气缸(收回) 平台顶板 导轨夹紧
关闭上压板 CCD 回位 打开Z轴上升手调网框( 使网板开口位置与 PCB 焊
盘对齐) 打开网框固定阀 打开网框夹紧阀 关闭 Z 轴上升( Z
轴 下 降 至 取 像 位置) 点击[<<]开关,PCB 松板退出 PCB 菜单。
2. [PCB 标志点采集]
在以上程序完成以后,单击右下角[退出]对话框,仍回到[参数设置 2]中,Z 轴回到原点
位置,可以进行生产;如需进行 PCB 标志点采集,应单击[Z 轴回到取像位置]对话框,使工
作台运动到取像位置,此时再单击[PCB 标志点采集]按钮,显示“在做下一步时请检查网框
是否夹紧”对话框,选择“否”仍回到[PCB]定位窗口;选择“是”,则可进入[Mark 选择]
窗口,如图 4–18 所示: