GKG_G3印刷机操作说明书 - 第7页
凯格 精 密机械有限公司 - 7 - 第一章 系统 描述 进行 清洗 时 清洗 卷纸 上 升 并 且 贴着 模板 底面 移 动 , 用过 的 清洗 纸被 不 断 地 绕 到 另 一 滚 筒 上 。 清洗 间 隔 时 间可 自 由 选择 , 清 洗行 程 可 根 据 印 刷行 程 自行 设定 。进行 湿 洗 时 , 当储 存 罐 中 清洗 液 不 够 时 , 系统 出 现 报警 显 示 , 此 时 应 将 其 充满 清洗 液 。 干 、 …

凯格精密机械有限公司
- 6 -
第一章
系统描述
1.4 系统的主要组成部分
本机包括机械、电气两大部分。
机械部分由运输系统、网板夹持装置、PCB 板夹持装置、视觉系统、刮刀系统、自动网
板清洗装置、可调印刷工作台、气动系统等组成。电气部分由计算机及控制软件、计数器、
驱动器、步进电机和伺服电机以信号监测系统组成。
1.4.1 运输系统
组成:包括运输导轨、运输带轮及皮带、直流电机、停板装置、导轨调宽装置等。
功能:对 PCB 进板、出板的运输、停板位置及导轨宽度的自动调节以适应不同尺寸的 PCB
基板。
1.4.2 网板夹持装置
组成:包括网板移动装置及网板固定装置等。
功能:夹持网板的宽度可调,并可对钢网位置固定、夹紧。
1.4.3 PCB 板柔性夹持及定位装置
组成:真空盒组件、真空平台、磁性顶针、柔性的夹板装置等。
功能:柔性的板处理装置可定位夹持各种尺寸和厚度的 PCB 基板,带有可移动的磁性顶针和
真空吸附装置,在效控制 PCB 基板的挠度,防止板变形。
1.4.4 视觉系统
组成:包括 CCD 运动部分和 CCD—Camera 装置(摄像头、光源)及高分辨率显示器等,
由视觉系统软件进行控制。
功能:上视/下视视觉系统,独立控制与调节的照明,高速移动的镜头确保快速、精确地进行
PCB 和钢网板对准,无限制的图像模式识别技术具有 0.01mm 的辩识精度。
1.4.5 刮刀系统
组成:包括印刷头(刮刀升降步进控制装置、刮刀片安装部分)、刮刀横梁及刮刀驱动部分(伺
服马达、同步齿轮驱动)等。
功能:悬浮式印刷头,具有特殊设计的高刚性结构,刮刀压力、速度均由电脑伺服控制,调节
方便,维持印刷质量的均匀稳定。
1.4.6 自动网板清洗装置
组成:包括真空管、真空发生器、清洗液储存和喷洒装置、卷纸装置、升降气缸等。网板清
洗装置被安装在视觉系统后面,通过视觉系统决定清洗行程,自动清洗网板底面。

凯格精密机械有限公司
- 7 -
第一章
系统描述
进行清洗时清洗卷纸上升并且贴着模板底面移动,用过的清洗纸被不断地绕到另一滚
筒上。清洗间隔时间可自由选择,清洗行程可根据印刷行程自行设定。进行湿洗时,
当储存罐中清洗液不够时,系统出现报警显示,此时应将其充满清洗液。干、湿、真
空洗周期可自由调节。
功能:可编程控制的全自动网板清洁装置,具有干式、湿式、真空三种方式组合的清洗方式,
彻底清除网板孔中的残留锡膏,保证印刷品质。
1.4.7 可调印刷工作台
组成:包括 Z 轴升降装置(升降底座、升降丝杠、伺服电机、升降导轨、阻尼减震器等)、平
台移动装置(丝杆、导轨及分别控制 X、Y、θ方向移动的伺服电机等)、印刷工作台
面,磁性顶针、真空吸盘等。
功能:通过机器视觉,工作台自动调节 X、Y 及θ方向位置偏差,精确实现印刷模板与 PCB
板的对准。
1.4.8 操作系统控制:
采用 Windows 2000 操作系统,智能化的先进软件控制,极大地方便了用户的使用。
1.5 工作原理
由以上各部组成的全自动视觉印刷机在印刷焊膏时,锡膏受刮刀的推力产生滚动的前进,
所受到的推力可分解为水平方向的分力和垂直方向的分力。当运行至模板窗口附近,垂直方
向的分力使粘度已降低的焊膏顺利地通过窗口印刷到 PCB 焊盘上,当模板抬起后便留下精
确的焊膏图形。
凯格精密机械有限公司
- 8 -
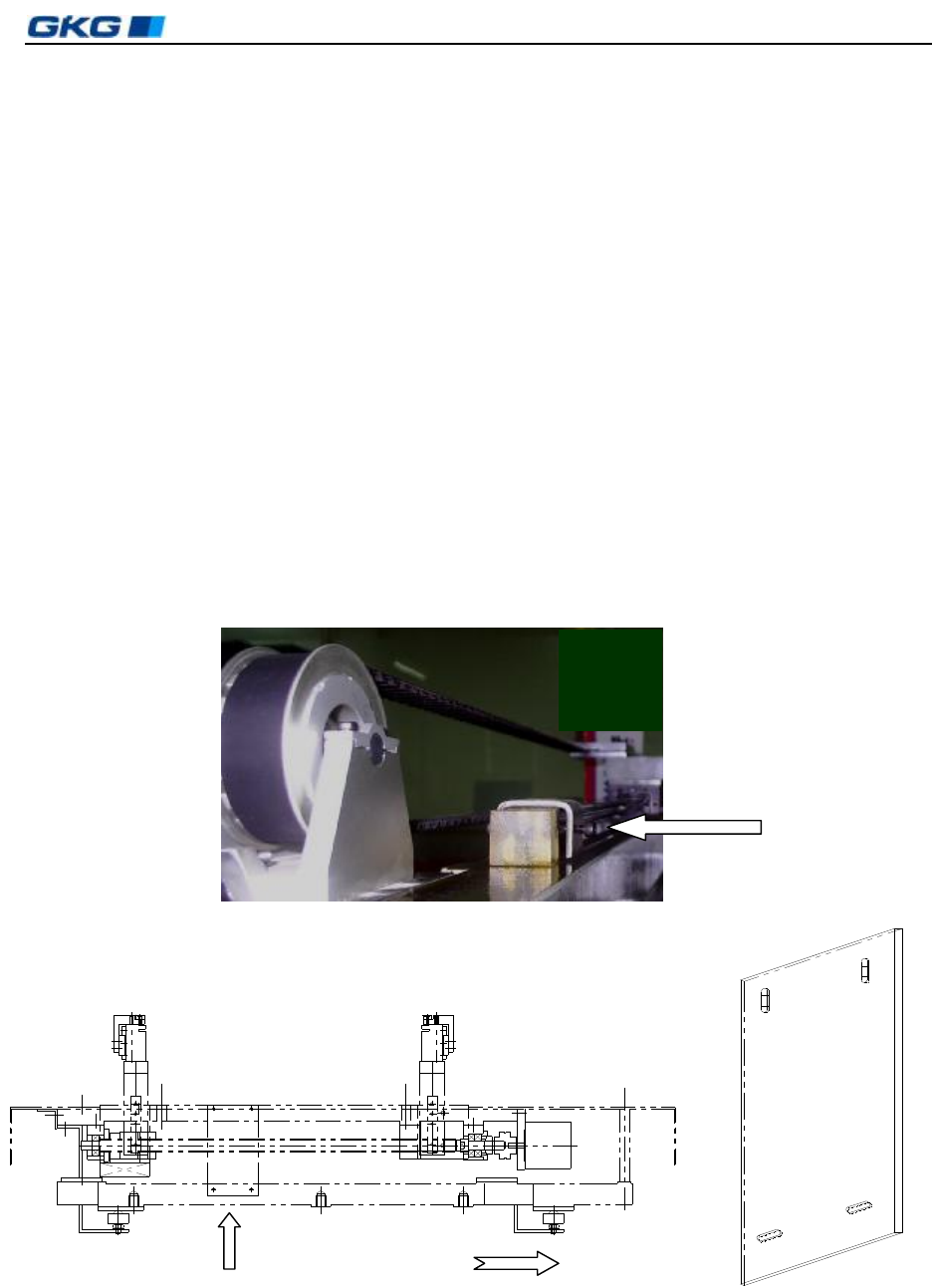
导轨固定夹
第二章
设备安装与调试
第二章 设备安装与调试
2.1 开箱
开箱后,请您首先做好以下工作:
1. 对照《装箱清单》所列各项进行查验。
2. 检查机器各部分是否有损坏,包括另箱包装的显示器、三色灯、日光灯及刮刀板等,
并将它们重新安装到印刷机上。
3. 务必将运输时安装在滑块两端的各导轨的导轨固定夹滑到导轨的两端(如图 4 –1 示)。
4. 将运输时安装的工作台固定板取下(如图 4 –2 示)。
5. 检查各联接处是否有松动脱落,各运动部分传输皮带有无脱落。
6. 检查各直线导轨上的滑块有无滑脱。
7. 检查电气元件是否固定、接触是否良好。
8. 开机前请务必详细阅读本《使用说明书》。
图 2-1 导轨固定夹
图 2-2 工作台固定板