JUKI_KE-2070-2080_MAINTE_CH.pdf - 第60页
维修调整要领书 2-1 为了防止突然的起动造成事故,请关掉电源之后再进行操作。 2 贴装头装置 2-1 . 贴装头装置的更换和更换后的调整 2-1 -1 . LNC 贴装头 1 ) 放出主体空气。 2 ) 取下贴装头顶盖。( 4 颗安装螺钉) 3 ) 从 贴装头主电路板中拔下喷射器的电磁阀线 束、真空传感器线束。 4 ) 卸下通向喷射器的 φ4、φ8 气管。 5 ) 卸下喷射器托架。( 4 颗安装螺钉) 6 ) 从伺服放大器电路板上拆下…
维修调整要领书
1-50
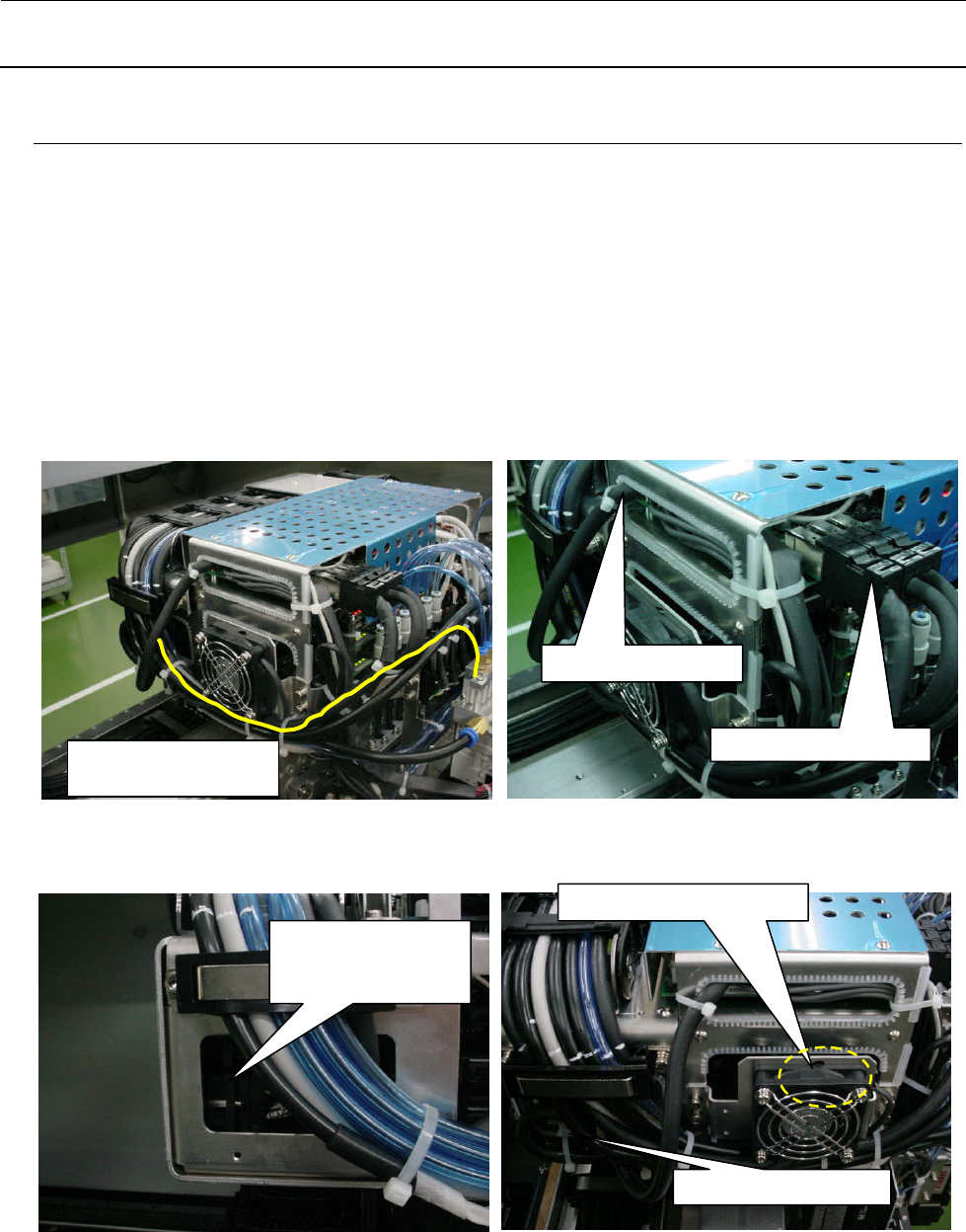
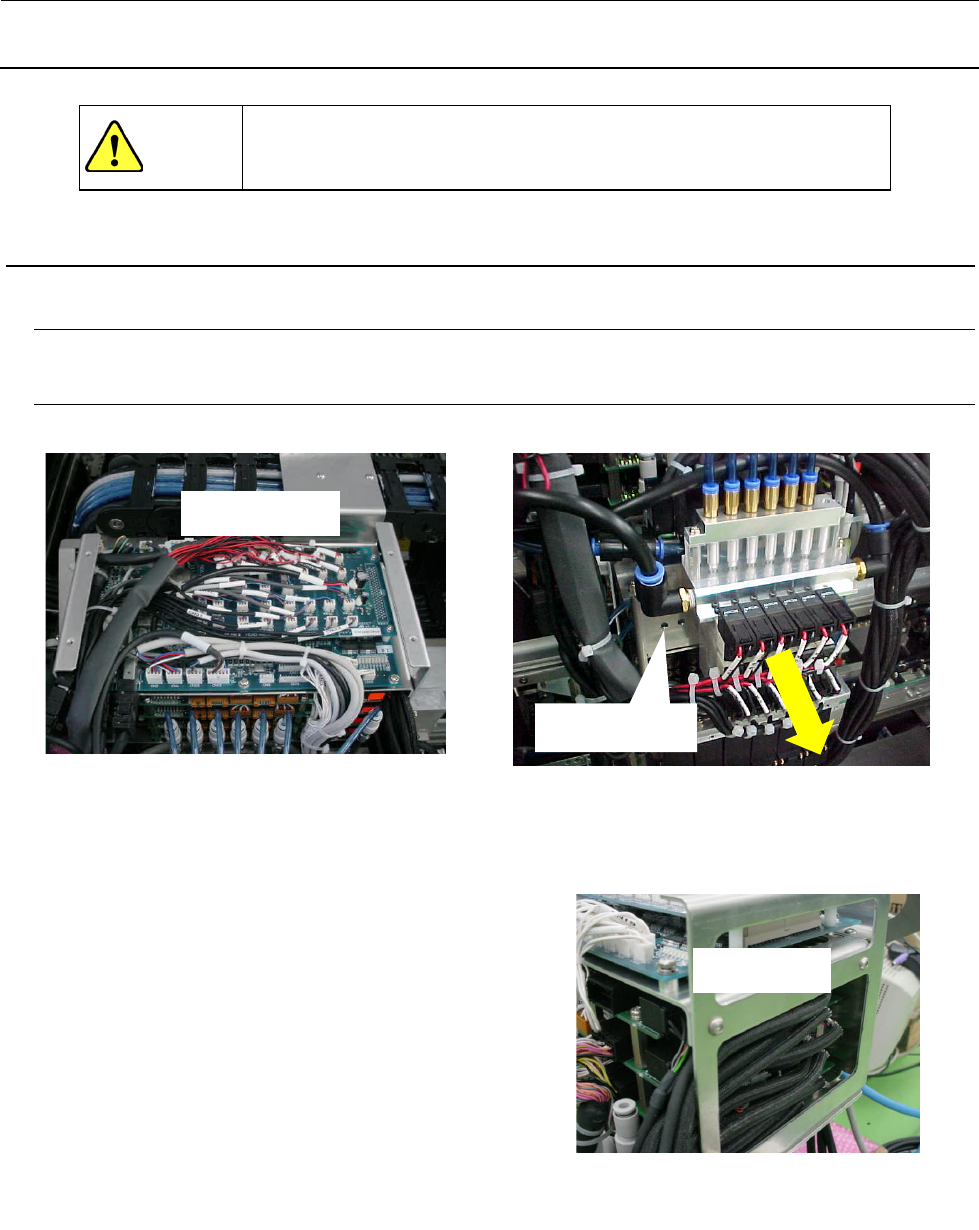
1-9-8.贴片头周围的配线
将来自 XY 拖链电缆(40058385)的各个束线连接到以下部位。
1) CN801、CN802、CN808 穿过图示的孔,插入贴装头主电路板里侧。
2) 摄像机电缆线(CN805)插入贴装头主电路板的三联插座左侧。
3) 电源线(CN211A,B 、CN212A,B、CN213A,B、CN214A,B)插入图示位置上的插座。
4) X 标尺传感器(CN175)在图示位置上中继、固定。
5) 1394 机器人电缆线按图示的路线配置,穿过贴装头右侧与来自 LNC 的连接器中继连接。
6) OPTICAL FIBER CABLE 7M 从风扇下侧通过,插入伺服放大器电路板最下档的 CN1A。
7) LA 传感器电缆按图示路线铺设,与伺服放大器电路板和 FMLA 传感器连接。
图1-9-8-1 图1-9-8-2
图1-9-8-3 图1-9-8-4
· 参照上图夹紧各电缆线。夹紧时,不要强行弯曲电缆线或施加负荷。特别是光缆,应小心操作。
1394 机器人电缆线、
LA 传感器拖链电缆路线
CN801, CN802, CN808
摄像机电缆线(CN805)
电源
CN211A,B、CN212A,B
CN213A,B、CN214A,B
OPTICAL FIBER CABLE 7M
X 标尺传感器(CN175)
维修调整要领书
2-1
为了防止突然的起动造成事故,请关掉电源之后再进行操作。
2
贴装头装置
2-1.贴装头装置的更换和更换后的调整
2-1-1.LNC 贴装头
1) 放出主体空气。
2) 取下贴装头顶盖。(4 颗安装螺钉)
3) 从贴装头主电路板中拔下喷射器的电磁阀线
束、真空传感器线束。
4) 卸下通向喷射器的 φ4、φ8 气管。
5) 卸下喷射器托架。(4 颗安装螺钉)
6) 从伺服放大器电路板上拆下 Z、θ 马达线束。
7) 将 Z 传感器托架从贴装头部分卸下。
8) 拆下 HMS 的中继插接器。
如果有 BMR,取下光缆。
9) 拆下 LNC 的编码器、1394 电缆线及磁尺放大器部分。
10) 从贴装头提升气缸用的管接头 Y 上拆下 φ4 气管。
11) 卸下气缸。(参照 2-5 项)
图2-1-1
贴装头主电路板
图2-1-2
喷射器托架
图2-1-3
Zθ 马达线束
危险
维修调整要领书
2-2
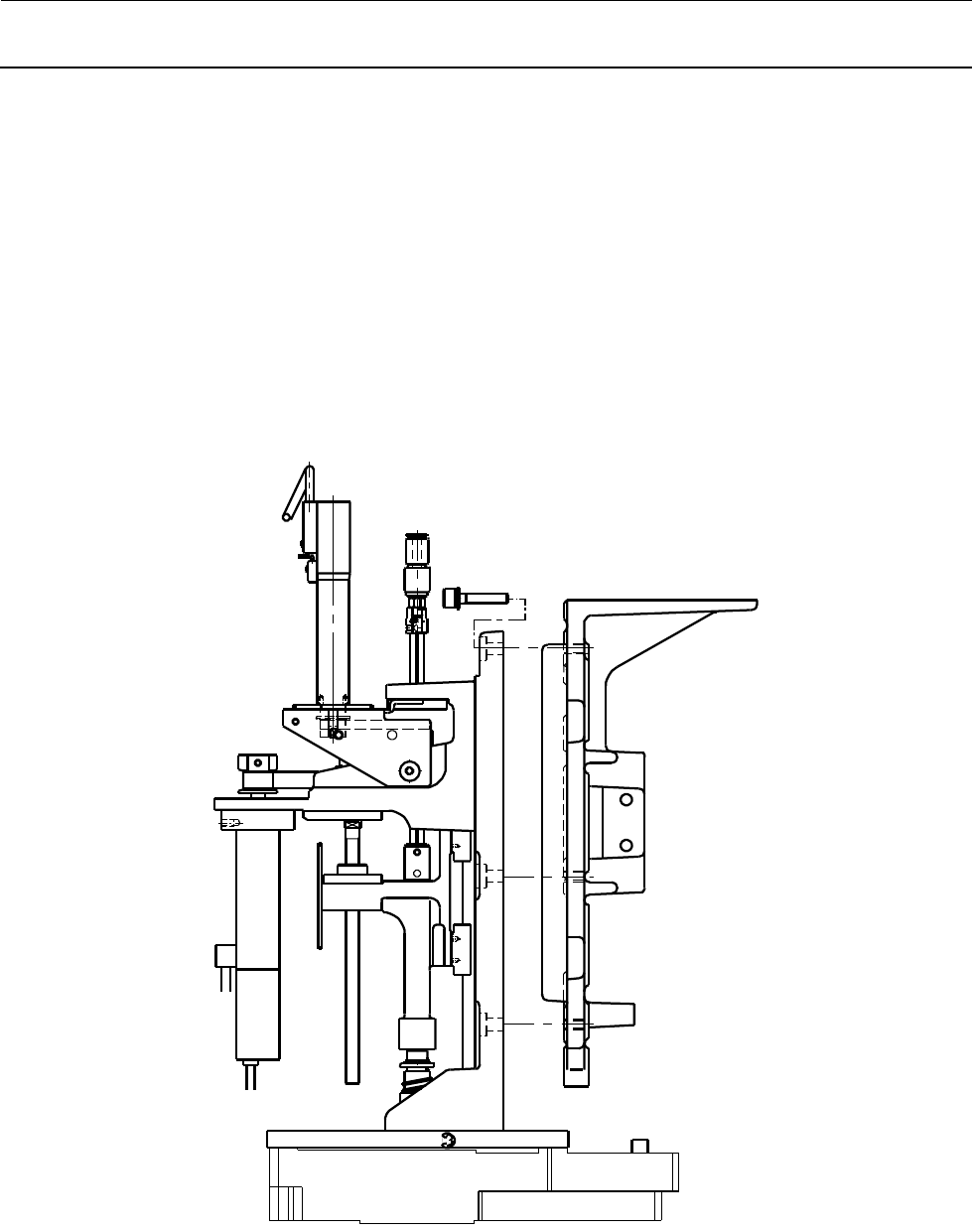
12) 请用手压住以免贴装头落下,同时取下 M5×M16 有头螺钉(6 颗)。
13) 请拔出 2 根平行销,将贴装头抬起,不要碰到其他元件。
14) 装配请按相反的步骤进行。
※ 给贴装头安装螺钉(6 颗)涂敷粘结剂 LOCTITE242 后,请以安装扭矩 7.0Nm 进行固定。
※ 各马达插头请参照位置标签进行连接。
15) 更换贴装头后,需要重新输入 MS 参数。
输入项目请参照 2-9 项。
图2-1-4