JUKI_KE-2070-2080_MAINTE_CH.pdf - 第84页
维修调整要领书 2-25 2-9 .更换后重新调整项目一览 激光偏差 激光缩放 比例 贴装头 偏差 贴装综合 偏差 VCS摄像机 偏差 VCS综合 偏差 贴装头组件 ○ ○ ( 注 2) ○ ○ ○ ( 注 1) ○ ( 注 1) Z 马达 ○ ― ― ― ― ― θ马达 ○ ○ ( 注 2) ― ― ○(注 1 ) ○(注 1 ) Z 传感器 ○ ― ― ― ― ― T 传感器 ○ ― ― ― ― ― LNC ○ ― ○ ○ ― ― …
维修调整要领书
2-24
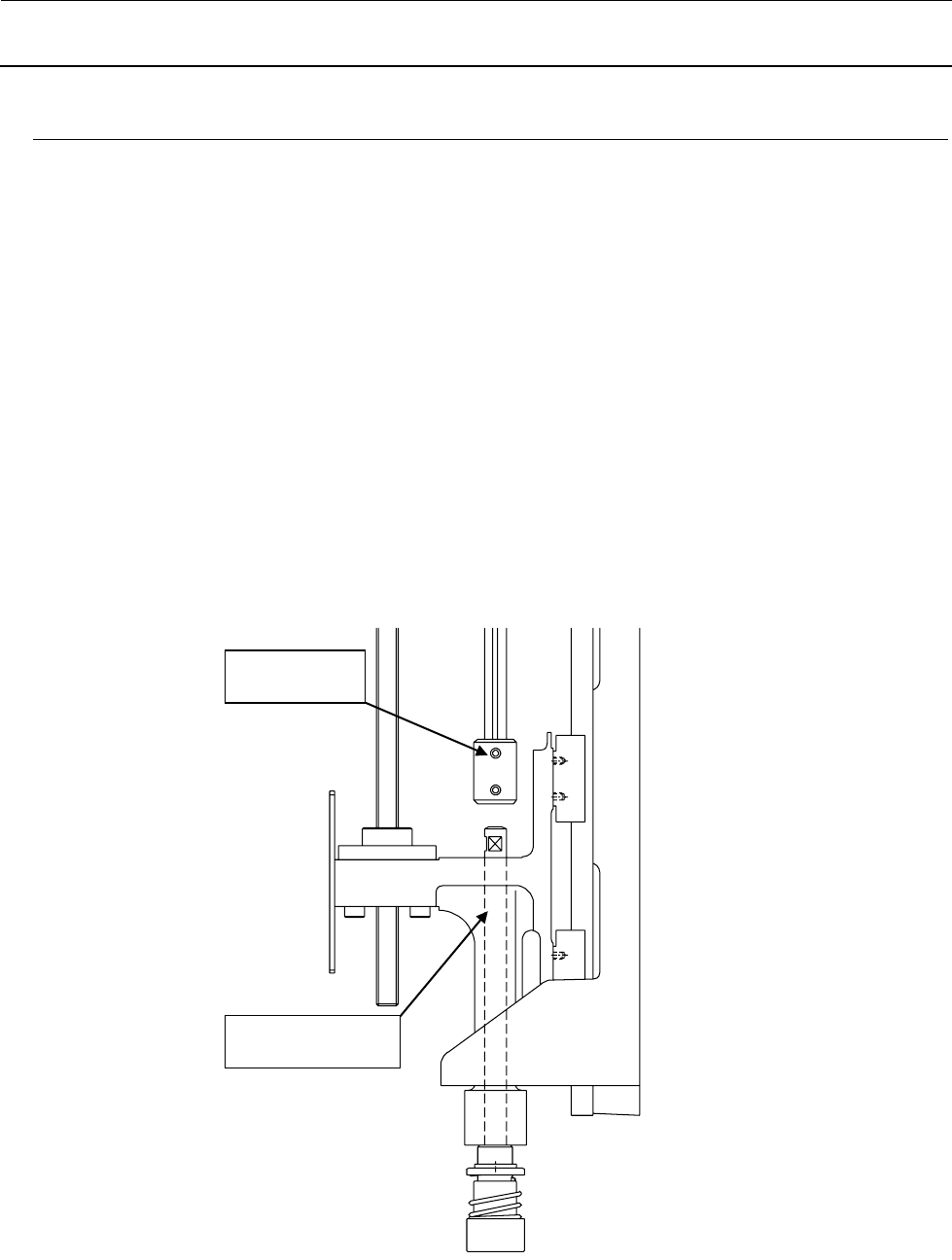
2-8.Z 滑动轴的更换
当更换了 Z 滑动轴时,需要调整 θ 轴的原点、Z 轴的原点并且重新输入 Z 轴高度方面以及激光相关
的 MS 参数。
(输入项目请参照 2-9 项。)
1) 取下联轴节下侧的止动螺钉。
2) 从 Z 滑动轴托架上拆下 Z 滑动轴。
3) 安装请按相反的步骤进行。
※ 联轴节要一面推入一面固定,并确认 Z 滑动轴没有上下的松动。
※ 在固定联轴节的止动螺钉时,使 Z 滑动轴的平部与联轴节止动螺钉的朝向一致。止动螺钉请
以安装扭矩 0.5Nm 进行固定。
※ IC 贴装头也是按同样的步骤更换。
图2-8-1
Z 滑动轴
联轴节
维修调整要领书
2-25
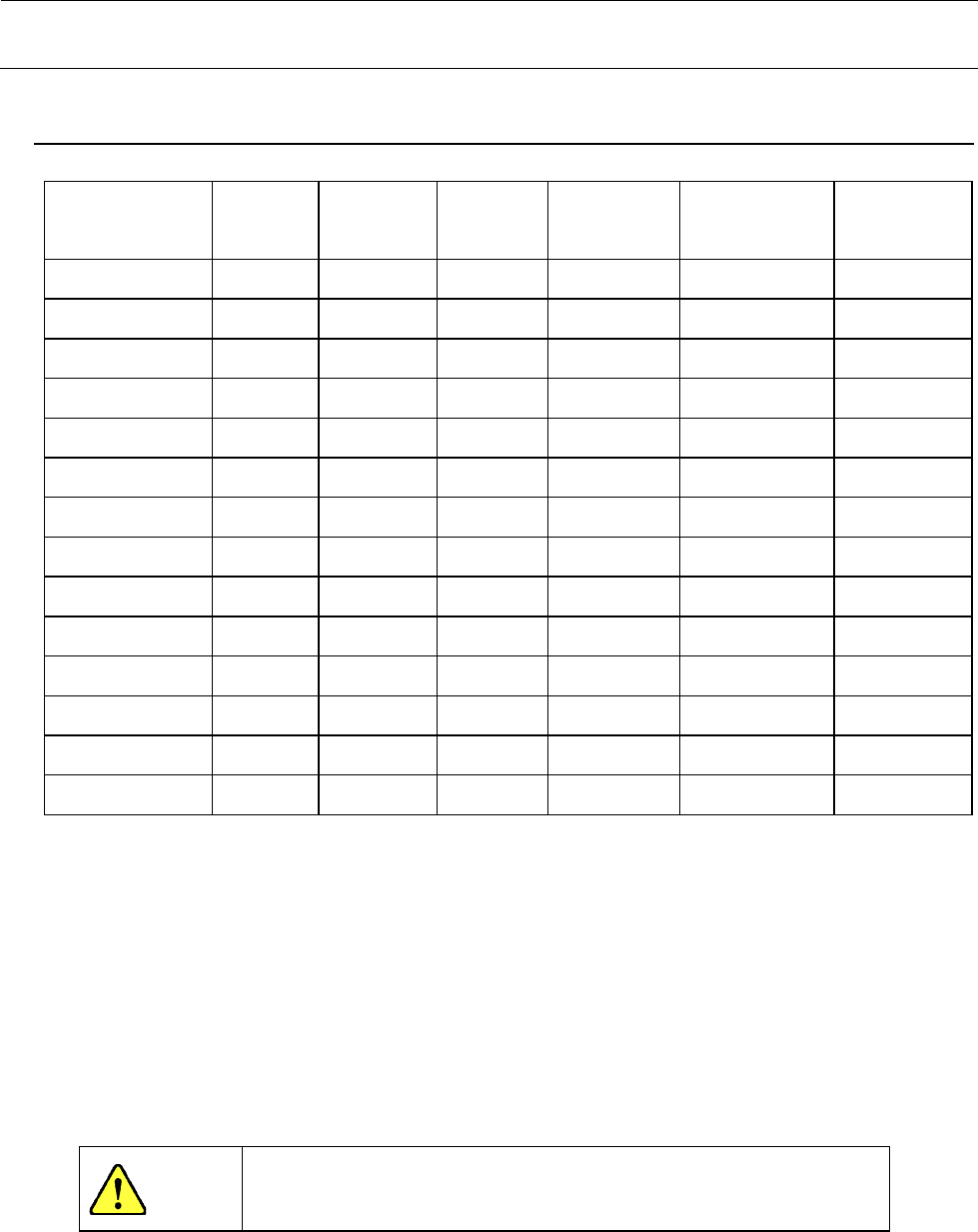
2-9.更换后重新调整项目一览
激光偏差 激光缩放
比例
贴装头
偏差
贴装综合
偏差
VCS摄像机
偏差
VCS综合
偏差
贴装头组件 ○ ○(注 2) ○ ○ ○(注 1) ○(注 1)
Z 马达 ○ ―
― ―
― ―
θ马达 ○ ○(注 2)
― ―
○(注 1) ○(注 1)
Z 传感器 ○ ― ― ― ― ―
T 传感器 ○ ― ― ― ― ―
LNC ○ ― ○ ○ ― ―
FMLA ○ ○(注 2) ○ ○ ― ―
触点传感器 ○ ― ― ― ― ―
贴装头上升气缸
―
― ― ― ― ―
同步皮带 Z ○ ― ― ― ― ―
同步皮带θ ○ ― ― ― ― ―
Z 滑动轴 ○ ― ○ ○ ― ―
LNC61/62(注 3) ○ ― ○ ○ ― ―
EPV61/62(注 3) ○ ― ○ ○ ― ―
(注1) 只有 KE1080/KE2080/KE2080R 及带 MNVC 选项的机器需要
(注2) 仅适用于 KE2080R 的 IC 贴装头(FMLA)
(注3) 用于吸取/贴片监视器(选项)。
MS参数请从左边按顺序输入。
更换贴装头装置组、Z 马达、同步皮带 Z 后进行激光偏差输入时,请将激光偏差的基板上面高度值置
为 0 之后重新取得。如果仍是更换前的偏差值,有些情况下可能不能正确取得偏差或不能自动取得。
为了防止伤害人体,HOD 操作中请不要把手伸进机器,也不要把脸
和头靠近机器。
注意
维修调整要领书
3-1
为了防止突然的起动造成事故,请关掉电源之后再进行操作。
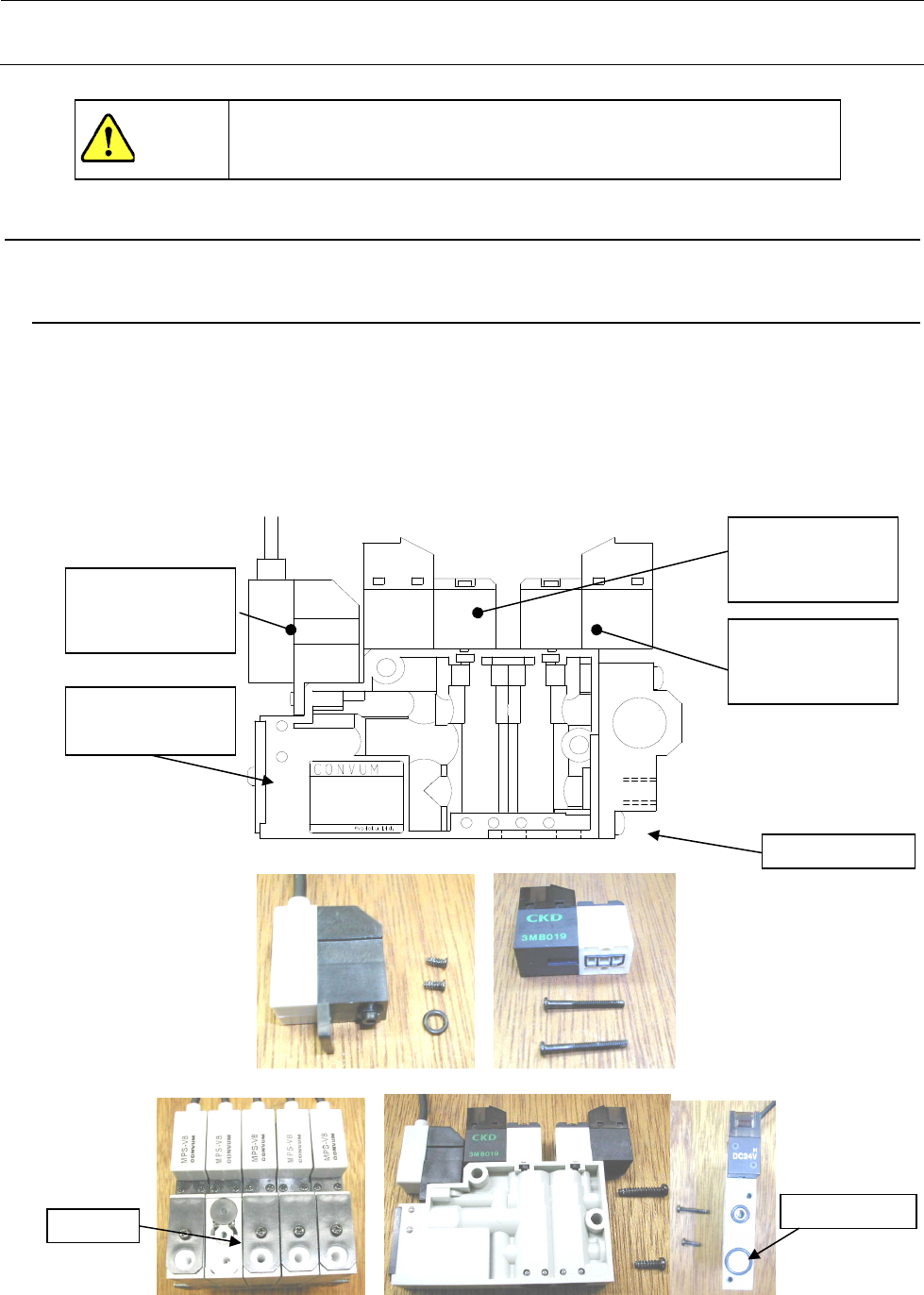
3 贴装头周边
3-1.推顶器的更换
降低主体的原压力,进行更换。
电磁阀、压力传感器因为插头类型的不同,请不要连接错误,更换后请用手动控制的贴装头真空和鼓风
装置ON/OFF进行确认。
注) 请不要弄丢电磁阀的里面有油封、压力传感器的O形环等零件。
图 3-1-1 推顶器的更换
真空传感器 电磁阀
更换消音器 推顶器单体(左:正面/右:侧面)
真空破坏用电磁阀
圆头小螺丝(×2)
垫圈
真空用电磁阀
圆头小螺丝(×2)
垫圈
真空传感器
圆头小螺丝(×2)
O 形环
圆
头
小螺丝(×2)
推顶器过滤器
消音器护罩
圆头小螺丝(×1)
消音器
危险