00191368-01.pdf - 第194页
6 Visionfunktionen Betriebsanleitung HS-50 6.1 Die Visionsysteme am Automaten Software-V ersion 5.01 Ausgabe 01/99 192 /3 .DPHUDV\VW HPH /HJHQGH]X$ EE (1) LP -Kamer a - Opti k und Bel euch tung (2) Kam…
Betriebsanleitung HS-50 6 Visionfunktionen
Software-Version 5.01 Ausgabe 01/99 6.1 Die Visionsysteme am Automaten
191
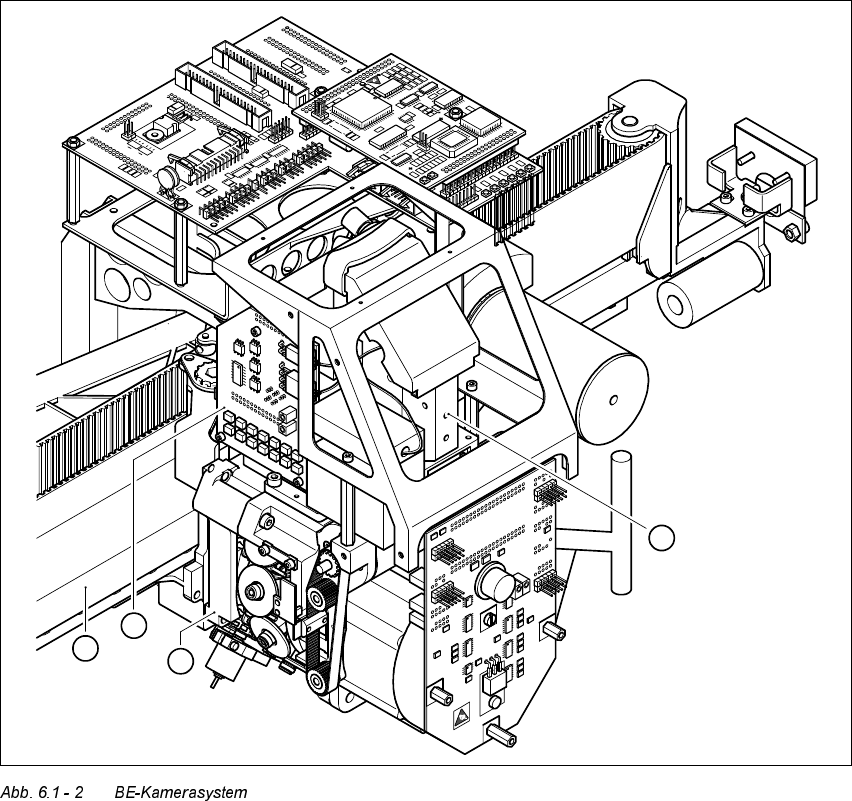
/HJHQGH]X$EE
(1) 12er Revolverkopf /DLM1
(2) BE-Kamera 24x24
(3) BE-Beleuchtungssteuerungsplatine
(4) Portal
Das BE-Kamerasystem ist an der Oberseite des Revolverkopfes mit vier Innensechskant-
schrauben befestigt. Zwei Zylinderstifte fixieren seine Position.
Mit dem BE-Kamerasystem lassen sich Bauelemente der Größe 0402 bis einschließlich SO32
optisch zentrieren und bestücken. Die Bauelementegröße variiert also zwischen 1,0 mm x
0,5 mm und max. 18,7 mm x 18,7 mm, die Bauelementedicke zwischen 0,3 mm und 6 mm.
Das minimale Beinchenrastermaß darf 0,5 mm betragen.
2
1
3
4
6 Visionfunktionen Betriebsanleitung HS-50
6.1 Die Visionsysteme am Automaten Software-Version 5.01 Ausgabe 01/99
192
/3.DPHUDV\VWHPH
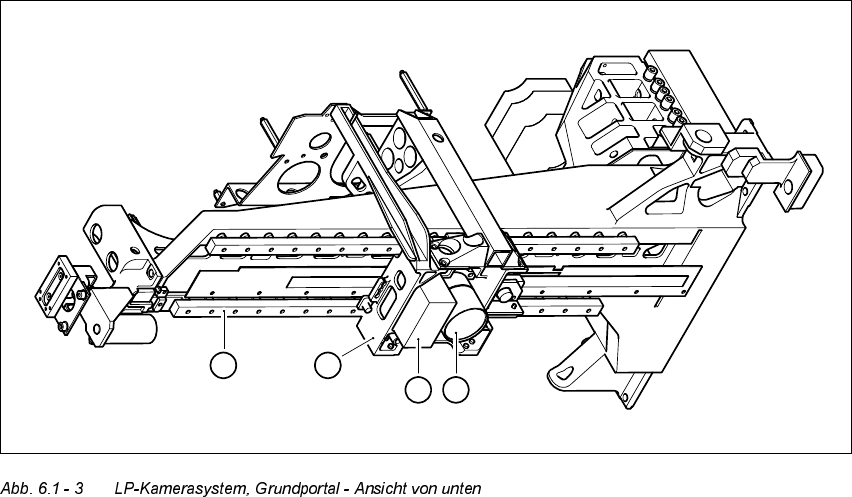
/HJHQGH]X$EE
(1) LP-Kamera - Optik und Beleuchtung
(2) Kameraverstärker
(3) Kopfhalterung
(4) Portal
Das LP-Kamerasystem (siehe Pos. 1 und 2 in Abb. 6.1 - 3) besteht im wesentlichen aus fol-
genden Komponenten:
– Optisches Linsensystem
– CCD-Chip
– CCD-Kameraverstärker
– Eine Beleuchtungsebene zur Beleuchtung von LP-Marken und Inkpunkten
Das LP-Kamerasystem ist auf der Unterseite des Portals an der Revolverkopfhalterung befe-
stigt. Es zentriert standardmäßig Leiterplatten einer Größe von 50 mm x 50 mm bis 368 mm
x 460 mm (2" x 2" bis 14,5" x 18"). Die Leiterplattenstärke darf sich dabei im Bereich zwischen
0,5 mm und 4,5 mm bewegen.
1
2
4
3
Betriebsanleitung HS-50 6 Visionfunktionen
Software-Version 5.01 Ausgabe 01/99 6.1 Die Visionsysteme am Automaten
193
9LVLRQDXVZ H UWHHLQKHLWHQ
Die beiden Visionauswerteeinheiten (siehe Pos. 1 und 2 in Abb. 6.1 - 4) stecken im Steuer-
einschub des Automaten.
Sie verarbeiten und werten die elektrischen Signale der BE- und LP-Kamerasysteme aus. Aus
den Sollwertabweichungen werden Korrekturwerte ermittelt, die in die Neuberechnung der
Bestückpositionen und Drehwinkel für die Bestückung eingehen.
Darüber hinaus führen die Visionauswerteeinheiten eine Bauelementeidentifizierung durch.
Die exakte Bestimmung der Abhollage von Bauelementen, die insbesondere bei kleinen Bau-
elementen wichtig ist, wird ebenfalls in den Visionauswerteeinheiten durchgeführt.