00191368-01.pdf - 第197页
Betriebsanleitung HS-50 6 Visionfunktionen Software-Version 5.01 A usgabe 01/99 6.1 Die Visionsysteme am Automaten 195 /HJHQGH]X$ EE (1) Visiona uswerteeinh eit MV S 340, Por tale 1 und 4 (2) Visiona uswertee…
6 Visionfunktionen Betriebsanleitung HS-50
6.1 Die Visionsysteme am Automaten Software-Version 5.01 Ausgabe 01/99
194
4
ICOS 2ICOS 1GEMMC
X4svX3svX2svX1sv
S-COM 1S-COM 2
AUX
VGA
HS3L
X4su
X3su
X6suX7su
X8su
X5suX9su
Abort
Reset
Reset
Abort
X9st X5st X8st
X7st X6st
X3st X4st
HS3L
VGA
AUX
S-COM 2
S-COM 1
Kamera 2/4 Kamera 1/3
Kamera 2/4 Kamera 1/3
1 2 3
9
5
6
10
7
8
Betriebsanleitung HS-50 6 Visionfunktionen
Software-Version 5.01 Ausgabe 01/99 6.1 Die Visionsysteme am Automaten
195
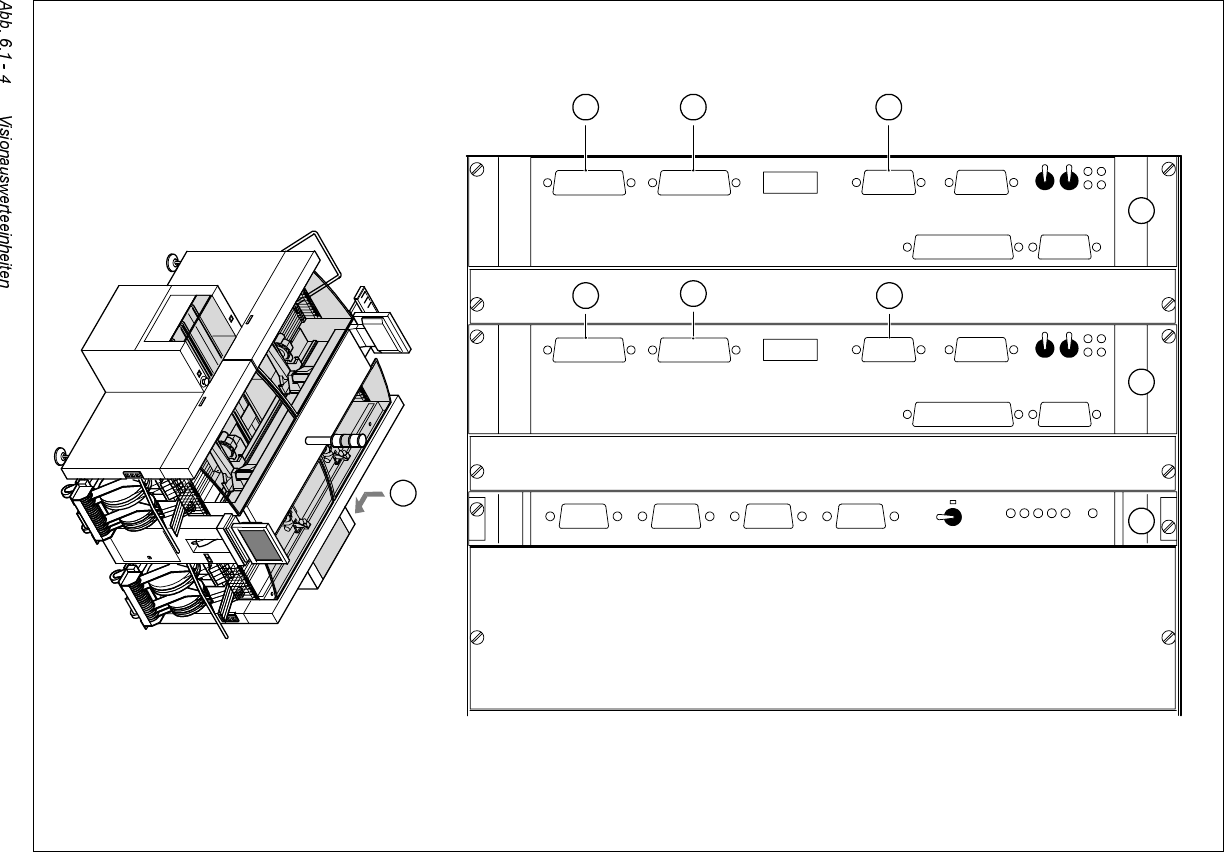
/HJHQGH]X$EE
(1) Visionauswerteeinheit MVS 340, Portale 1 und 4
(2) Visionauswerteeinheit MVS 340, Portale 2 und 3
(3) Videomultiplexer
(4) Lage des Steuereinschubs
(5) X6st: BE- und LP-Kamera, Portal 1
(6) X7st: BE- und LP-Kamera, Portal 2
(7) X6su: BE- und LP-Kamera, Portal 3
(8) X7su: BE- und LP-Kamera, Portal 4
(9) X5st: Bildausgang (VGA) zu Stecker X3sv (Videomultiplexer)
(10) X5su: Bildausgang (VGA) zu Stecker X4sv (Videomultiplexer)
Die elektronischen Bildsignale von Bauelementen, LP-Paßmarken und Zuführmodulmarken
können von den Visionauswerteeinheiten über den Videomultiplexer an die beiden Stations-
bildschirme übertragen werden und somit für Meß- und Testzwecke genutzt werden.
6 Visionfunktionen Betriebsanleitung HS-50
6.2 LP-Visionsystem Software-Version 5.01 Ausgabe 01/99
196
/39LVLRQV\VWHP
Das LP-Visionsystem erfaßt die genaue Lage der Leiterplatte durch Vermessung von Paß-
marken und ermittelt den Versatz in x- und y-Richtung, den Verdrehwinkel relativ zur LP-
Transportrichtung und die Scherung der LP. Auch Ausschußmarkierungen (Inkpunkte), wer-
den vom LP-Visionsystem erfaßt und ausgewertet.
6\VWHPEHVFKUHLEXQJ
Das LP-Visionsystem zur Leiterplattenlageerkennung besteht aus dem optischen System zur
Leiterplattenlageerkennung und der Visionauswerteeinheit
2SWLVFKHV6\VWHP]XU/HLWHUSODWWHQODJHHUNHQQXQJ
Jedes Portal besitzt ein eigenes LP-Lageerkennungssystem (siehe Abb. 6.1 - 3, Seite 6 -
192).
9LVLRQDXVZHUWHHLQKHLW
Bei jedem Automaten sind im Steuereinschub zwei Auswerteeinheiten zur Leiterplatten- und
Bauelementelageerkennung untergebracht (siehe Abb. 6.1 - 4, Seite 6 - 194).
Eine CCD-Kamera (SONY XC75-Kamera) mit integrierter Abbildungs- und Beleuchtungsoptik
bildet das optische LP-Lageerkennungssystem. Das Gesichtsfeld des LP-Moduls beträgt 5,7
mm x 5,7 mm. Innerhalb der Maße der Gesichtsfelder kann ein Suchfeld in Lage und Größe
frei programmiert werden. Die Abbildungsoptik ist eine spezielle Meßoptik, die Meßfehler auf-
grund von Leiterplattenwölbungen weitestgehend kompensiert. Die Beleuchtung wird nur
während der Aufnahme von Paßmarken eingeschaltet.
Die Visionauswerteeinheit (MVS) ist ein Einplatinensystem gemäß VME-Standard. Die Hard-
ware besteht aus dem
– MVS Motherboard mit Visionprozessor und Schnittstellenverbindungen und dem
– MVS Kamerainterface für bis zu vier CCD-Kameras.
0960RWKHUERDUGPLW9LVLRQSUR]HVVRUXQG6FKQLWWVWHOOHQYHUELQGXQJHQ
Auf der VME-Modulrückseite befinden sich die beiden Steckverbindungen für den VME-Bus.
An der Frontseite des VME-Moduls befinden sich die Anschlußstecker für
– den Bildschirm (VGA-Modus, 15-poliger SUBD-Stecker)
– die Hochgeschwindigkeitsschnittstelle (HS
3
L), 9-poliger SUBD-Stecker
– bis zu 4 Kameraeingänge (2 15-polige SUBD-Stecker)