LBO 27 Zoll.pdf - 第44页
1 Montageanleitung 27" SIPLACE X4 LBO 27" Ausgabe 09/2007 44 23, 1, // type vacuum toolin g = vacuum tooling with 2 vacuum sensors 1 24, 0, // no verification of clamping with motor 1 41, 0, // left side fixed,…
LBO 27" 1 Montageanleitung 27" SIPLACE X4
Ausgabe 09/2007
43
parameter track 1 (and common parameter) 1
1 - list parameter 1
2 - modify parameter 1
3 - save to EEPROM 1
t - change track 1
0 – quit 1
{Wählen Sie 2} 1
parameter track 1 number: 87 1
{Tippen Sie 87 ein} 1
parameter 87 = 600 "[ms] drive-up time stopper LBO" 1
(300 .. 2000, standard 600) 1
do want to modify parameter 87 ? (y/n) 1
{Tippen Sie den neuen Wert von 1250 ein} 1
new value: 1250 1
parameter 87 = 1250 "[ms] drive-up time stopper LBO" 1
do want to put all changed parameters to Eeprom? (y/n) 1
{Wählen Sie y} 1
parameters saved 1
1
{Wählen Sie zur Kontrolle des Wertes nocheinmal 1} 1
parameter 1
1 - list parameter 1
2 - modify parameter 1
3 - save to EEPROM 1
t - change track 1
0 - quit 1
1
parameter track 1 1
1, 6, // version 1
10, 500, // [mm/s] maximum velocity conveyor 1
11, 350, // [mm/s] velocity drive-in machine 1
12, 350, // [mm/s] velocity drive-out machine 1
13, 50, // [0.1m/s²] maximum acceleration 1
14, 60, // [mm/s] velocity laser-light barrier 1
15, 25, // [0.1m/s²] deceler.laser-light barrier 1
16, 350, // [mm/s] velocity sensor laser-light 1
20, 0, // barcode scanner 1
21, 0, // ceramic centering unit 1
22, 0, // optional stopper 1

1 Montageanleitung 27" SIPLACE X4 LBO 27"
Ausgabe 09/2007
44
23, 1, // type vacuum tooling = vacuum tooling with 2 vacuum sensors 1
24, 0, // no verification of clamping with motor 1
41, 0, // left side fixed, width adjustment 1
43, 0, // fixed rails pitch (actual) 1
44, 0, // fixed rails pitch (target) 1
48, 65, // [%] force stepping motor width adj. 1
49, -993, // [um] offset width adjustment 1
50, -3813, // [um] offset fixed rail 1
47, 1, // position fixed rail ok 1
60, 991, // [um] calibration position 1, width adj. 1
61, 21513, // [um] calibration position 2, width adj. 1
62, 326, // [um] cavity driver, input, width adj. 1
63, -447, // corr. a0, sensor width adj., input 1
64, -952, // corr. a1, sensor width adj., input 1
65, 118, // corr. a2, sensor width adj., input 1
66, 384, // [um] cavity driver, output, width adj. 1
67, -369, // corr. a0, sensor width adj., output 1
68, -598, // corr. a1, sensor width adj., output 1
69, 121, // corr. a2, sensor width adj., output 1
70, 365, // [um] cavity driver, middle, width adj. 1
71, -150, // corr. a0, sensor width adj., middle 1
72, -1952, // corr. a1, sensor width adj., middle 1
73, 397, // corr. a2, sensor width adj., middle 1
80, 60, // [mm/s] velocity stopper 1
81, 350, // [mm/s] velocity sensor stopper 1
82, 25, // [0.1m/s²] deceleration stopper 1
83, 600, // [ms] drive-up time stopper 1
84, 60, // [mm/s] velocity stopper LBO 1
85, 300, // [mm/s] velocity sensor LBO 1
86, 25, // [0.1m/s²] deceleration stopper LBO 1
87, 1250, // [ms] drive-up time stopper LBO 1
88, 10, // [%] velocity split for combined PCB 1
89, 200, // [ms] drive-up time stopper comb. PCB 1
90, 10, // [mm] bumper height LT (=0->40mm clearance) 1
1
: Schließen Sie Hyperterminal.
: Entfernen Sie das Schnittstellenkabel und schieben Sie die Transportsteuerung wieder ein.
: Starten Sie die Maschine neu, damit die Transportdaten Änderung übernommen wird.
Die Änderung der Transportfirmware ist nun abgeschlossen. 1
Dieser Wert muß 1250 ms betragen
LBO 27" 1 Montageanleitung 27" SIPLACE X4
Ausgabe 09/2007
45
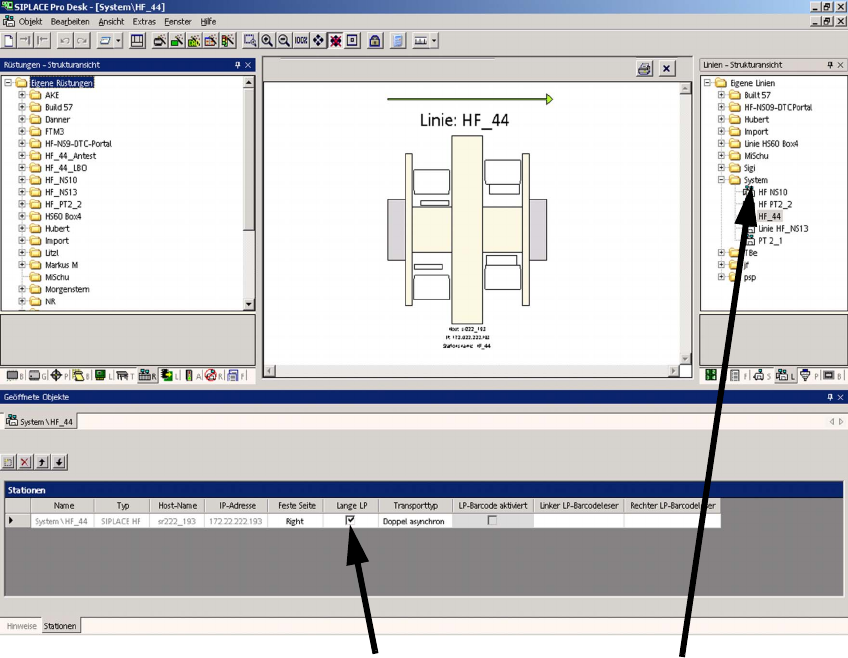
1.9 Änderungen in SIPLACE PRO
Die Option muss in SIPLACE PRO in die Linienkonfiguration und in die Rüstung eingetragen wer-
den. 1
1.9.1 Linienkonfiguration
: Wählen Sie eine Linie aus und setzen Sie den Haken bei Lange LP.
1
1
1
1
1
1
Lange LP anklicken Linie auswählenLange LP anklicken