00191369-01.pdf - 第184页
6 Vision functions User Manual HS-50 6.1 The vision systems on the placem ent system Software-Version 5.01 Edition 01/99 182 3&% FDPHUDV\VWHPV .H\WR)LJ (1) PCB c amera - lens and illu mination (2)…
User Manual HS-50 6 Vision functions
Software-Version 5.01Edition 01/99 6.1 The vision systems on the placement system
181
.H\WR)LJ
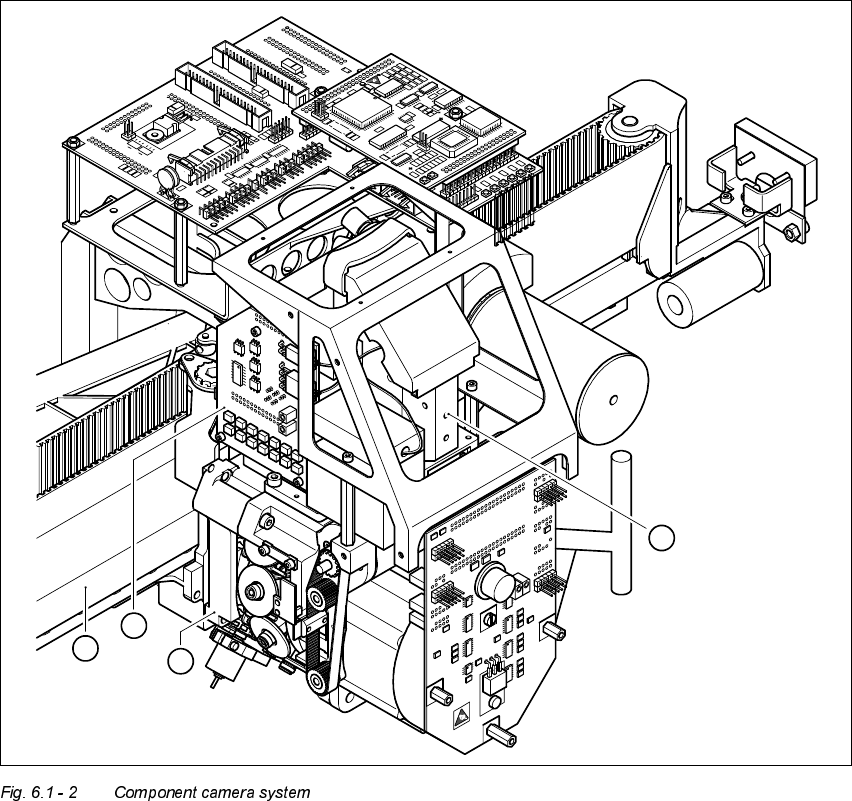
(1) 12-nozzle revolver head /DLM1
(2) 24 x 24 component camera
(3) Component illumination control board
(4) Gantry
The component camera system is fastened to the top of the revolver head with four hexagon
socket-head screws and is fixed in position with two parallel pins.
The component camera system can be used to optically center and place components ranging
from 0402 up to and including SO32 in size. The components, therefore, can vary between
1.0 mm x 0.5 mm and 18.7 mm x 18.7 mm in size and from 0.3 mm to 6 mm thick. The minimum
lead pitch can be as little as 0.5 mm.
2
1
3
4
6 Vision functions User Manual HS-50
6.1 The vision systems on the placement system Software-Version 5.01 Edition 01/99
182
3&%FDPHUDV\VWHPV
.H\WR)LJ
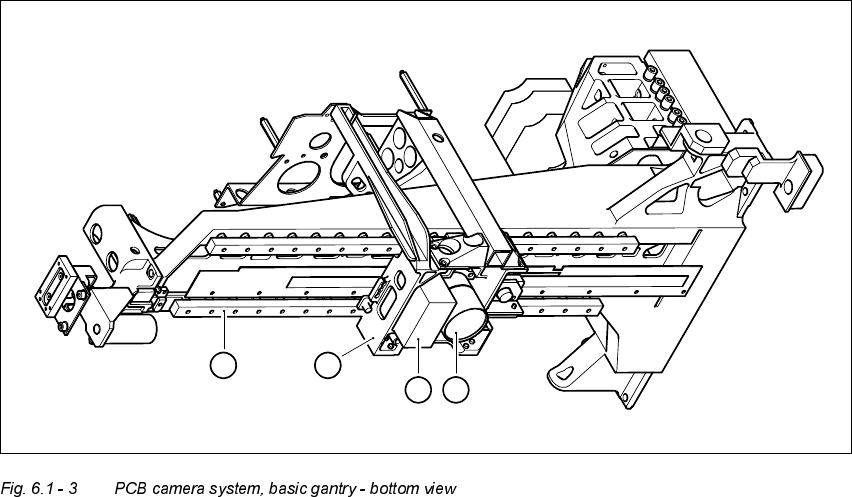
(1) PCB camera - lens and illumination
(2) Camera amplifier
(3) Head mount
(4) Gantry
The PCB camera system (see items 1 and 2 in Fig. 6.1 - 3) essentially consists of the following
components:
– Lens system
– CCD chip
– CCD camera amplifier
– An illumination plane for illuminating PCB fiducials and ink spots
The PCB camera system is fixed to the revolver head mount on the underside of the gantry. As
standard, it can center PCBs from 50 mm x 50 mm up to 368 mm x 460 mm (2" x 2" to 14.5" x 18")
in size, with the thickness ranging from 0.5 mm to 4.5 mm.
1
2
4
3
User Manual HS-50 6 Vision functions
Software-Version 5.01Edition 01/99 6.1 The vision systems on the placement system
183
9L VLRQDQDO\VLVXQLWV
The two vision analysis units (see items 1 and 2 in Fig. 6.1 - 4) are plugged into the placement
system’s control unit.
They process and analyze electrical signals from the component and PCB camera systems. Cor-
rection values are calculated from any deviations from setpoint. These values are then used for
recalculating the placement positions and angle of rotation for placement.
The vision analysis units also perform a component identification process. The precise component
pick-up position, which is particularly important for small components, is also determined in the
vision analysis units.