SM321 Service-CHI.pdf - 第360页
Samsung Component Plac er SM321 Service Manual 14-6 14.2.2.2. T rouble 状态与处理次序 1. T rouble 发 生时 前面 Panel 的 LED 显 示 Alarm Code 。 Alarm Code 请 参 照 “ 14.2.1 Servo Motor Alarm Code “ 。 2. 此 时 Servo Motor 为 关 闭 状 态 , 撤 销 需 做 …
Motor Driver
14-5
上表中Alarm Code No. 旁边记入 “
*
“符号的Alarm是不能Clear的Alarm,安全
关闭设备电源后重新打开电源时正常情况下Alarm被解除。
伺服放大器内部的控制电路因过大的噪音等因素误动作时可能如下标示Alarm
Code。
此时, 立即关闭电源后确认电缆配线状态及F.G(Frame Ground)的连接状态等。
如果发生上表中没有的Alarm Code,通过专用程序重新输入伺服放大器参数后
关闭电源,然后重新打开电源确认有无异常。
采取上述3号措施后仍然发生Alarm时,这种情况大部分是放大器破损引起的,
请替换伺服放大器。
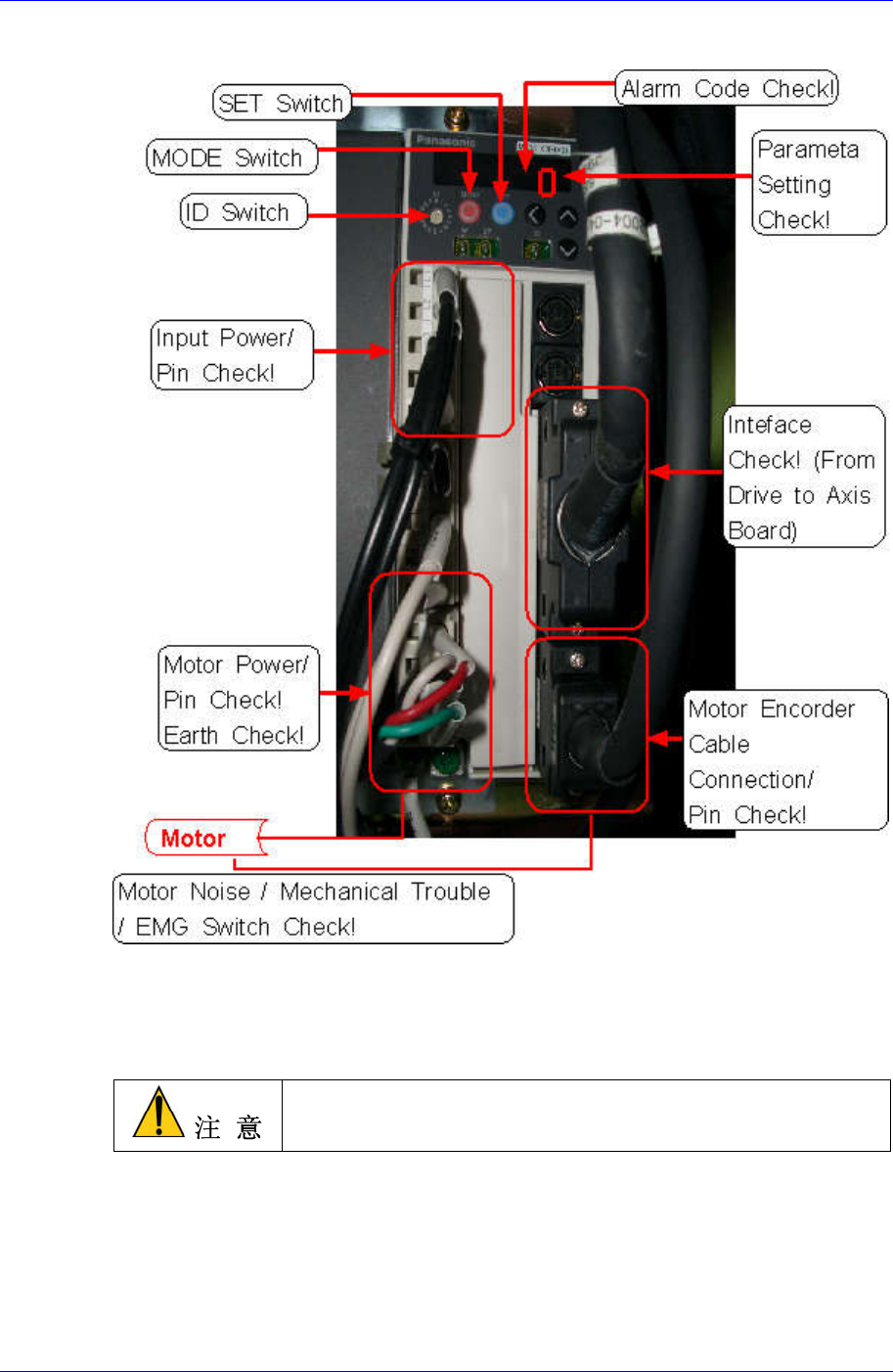
14.2.2. Servo Motor Driver Trouble 检点事项
14.2.2.1. 驱动器异常发生时 Sequence
异常发生 -> Dynamic Breaker / 电动机通电状态 / Servo 输出 / Alarm输出 ->
Dynamic Breaker 解除顺序进行。
这 Sequence启动时电动机将停止发生Alarm。
Samsung Component Placer SM321 Service Manual
14-6
14.2.2.2. Trouble 状态与处理次序
1. Trouble 发生时前面Panel的LED显示Alarm Code。 Alarm Code请参照 “14.2.1
Servo Motor Alarm Code“。
2. 此时Servo Motor为关闭状态,撤销需做120ms以上 A-CLR,设备中还可用
EMG RESET或通过STOP -> RESET -> READY的方法。
与电源有关的Alarm必须OFF/ON 电源。
3. 过负荷导致的Alarm过10秒以上后可正常再启动,因此轴的特定过负荷引发
Alarm时等候10秒以上后,输入电源。
4. 电动机端子台的连接部问题及配线错误引起的问题发生时, 请务必在断开设备
所有电源的状态下替换配线或进行确认。
5. 电动机不旋转时,如果没有器具性动作,就是Parameter的再检点及驱动器内部
Motor Driver
14-7
的电路损伤,请立即替换。
6. 电动机旋转不稳定,加减速不圆滑时也很多是器具性影响引起的, 但也有可能
是Parameter的异常值及Main电源的变化或电缆噪音影响,因此请确认电缆的
Shield线。
7. 原点位置不一致时很多都是Z相和home传感器相差太大或轴bord异常引起的,
因此请确认轴bord接触状态。
8. 噪音发生原因除去器具性的,主要原因都有杂音, Paremeter, Cable的接触不良。
14.2.3. Servo Motor Driver 替换
14.2.3.1. 必要工具
扳手
十字 十字形(+)螺丝刀, 一字 一字形(-)螺丝刀
T Wrench or Hex Wrench
Motor Driver Data Cable (P-Motor用):Servo Motor用
14.2.3.2. Driver 替换次序
1. 点击设备前面的<EMG>按钮,切断电动机电源。此时, 应打开设备全体电源
或打开相应Motor AMP电源。
2. 利用Driver分离设备后盖。
3. 请参照 “14.2.4 Parameter Download/Upload “,把 保 存在 以前 Driver的
parameter做备份。
新Driver中已设置制造商的标准Parameter。但,本公司 Tuni
ng时Parameter可能会有所变更。
4. 在已有的Driver中不能卸载Parameter时,请卸载分发的标准parameter。
Service部件供应时,已卸载标准Parameter。
Servo motor的Parameter种类基本上如下区分。
以轴区分: X,Y,Z(1,3,5 / 2,4,6 ), Swing, Width(C/V)
5. 重新关闭设备电源。
6. 请分离连接在所要替换Driver的电缆。
7. 替换不良Motor Driver。
8. 组装时为拆卸的倒序。
9. 设备通电后确认设备是否正常起动。