SM321 Service-CHI.pdf - 第383页
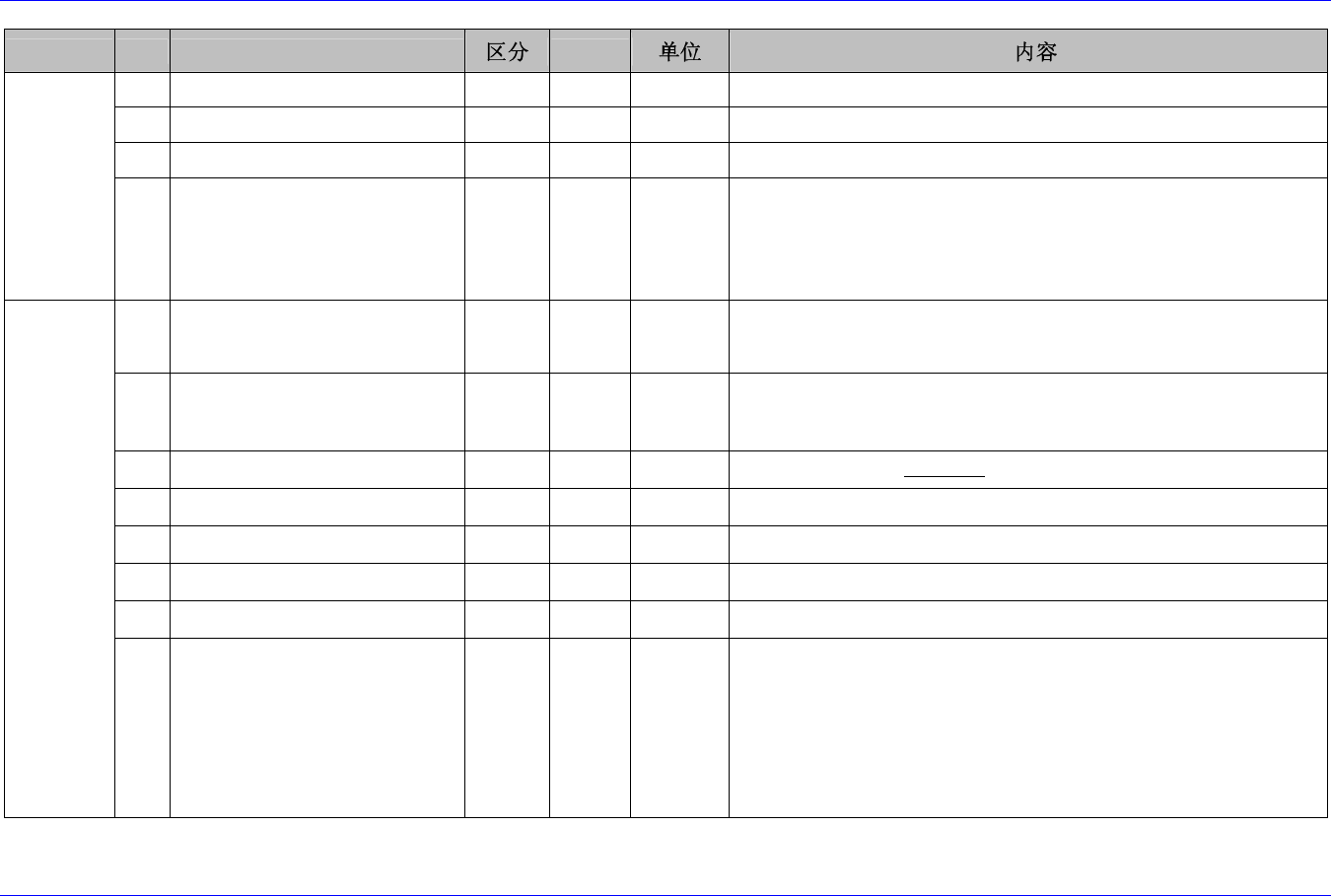
Softwar e 15-13 Module No Name V alue 28 MOUNT_POS_CHECK _METHOD Use 0 贴装前确认是否在 PCB 内的 功能 0: 确认 . 1: 贴装 S TOPP ER 在前面右侧 . 2: 贴装 S TOPP ER 在前面左侧 . 3: 贴装 S TOPP ER 在后面右侧 . 4: 贴装 S TOPP ER 在后面左侧 . 30 SUPPORT_GR AB_AND_MOVE …
Samsung Component Placer SM321 Service Manual
15-12
Module No Name
Value
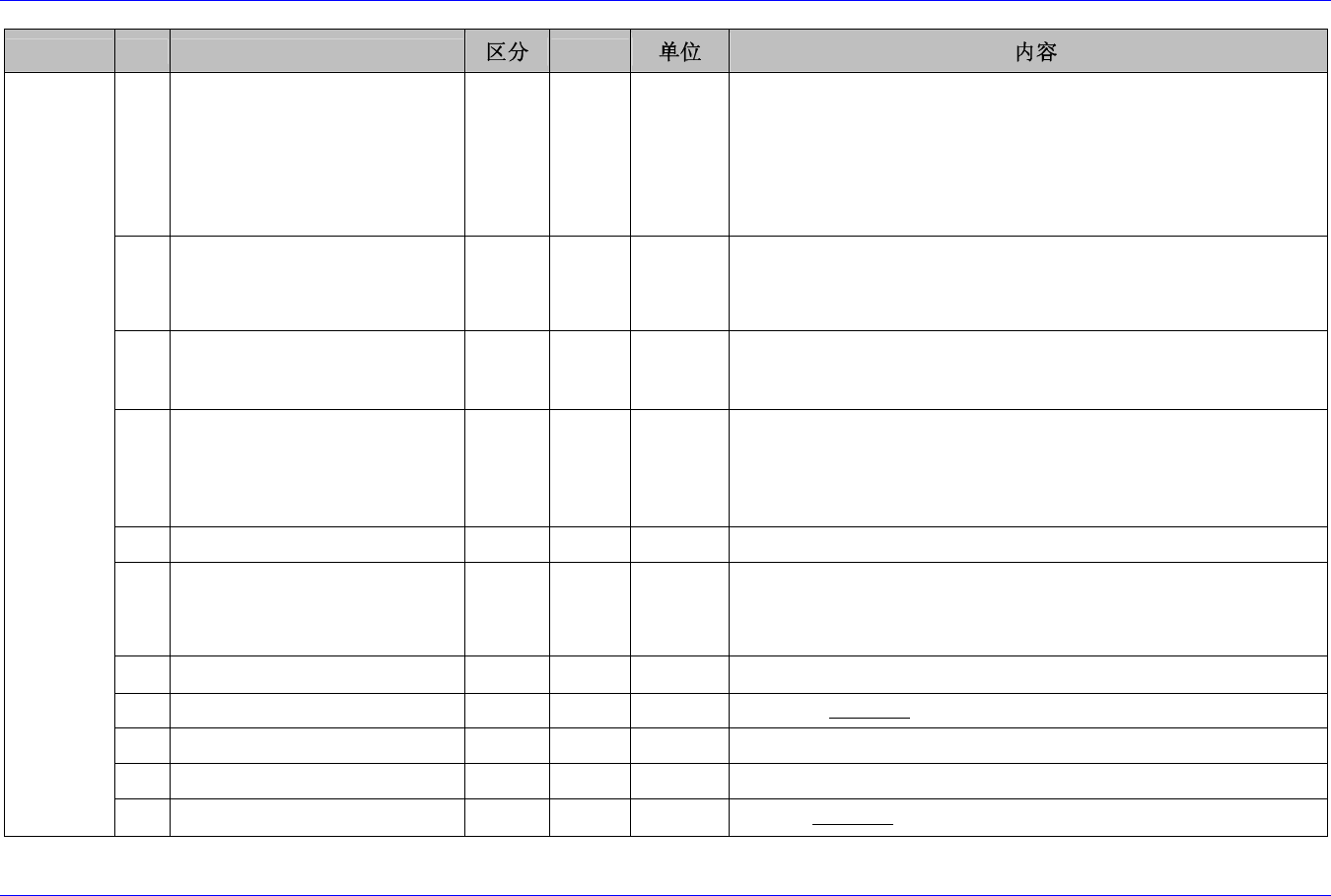
46 OPT_HEAT_SENSOR_TERM Use 0 msec 0:不使用.以输入的时间为周期,告知热传感器感知与否.
47 OPT_AREA_SENSOR Use 0 Const 0:不使用, 1:Area Sensor 使用
48 OPT_BYPASS_SW_TIME Use 600 sec 0:不使用, 以输入的时间为周期告知Bypass状态与否
Safety
49 OPT_BYPASS_SW_DOOR Use 0 Const
0: 用一把设备 ByPass key,Check全部门
2:. 各有门ByPass key后面 Door Check
3: 各有门ByPass key. 前后面Door Check
50 OPT_MFOV_NO_Z_UP Use 0 Const
0: 分割识别时, XY移动时Z轴 Up/Down
1: 分割识别时, XY移动时Z轴几乎不移动
71 OPT_HRS_VISION Use 0 Const
0:不使用HRS功能
1: 使用HRS功能
62 SYS_FLY_OUTER_LEVEL Use 0 Const Fly Outer 照明Control
HTU
algorithm
UTH
设置
68 SMALL_COMP_METHOD Use 15 Const
与Small Comp有关的Method
70 SMALL_COMP_SIZE Use 650 um Small Comp的基准大小
72 VERY_SMALL_COMP_METHOD Use 7 Const
与Very Small Comp有关的Method
73 VERY_SMALL_COMP_SIZE Use 400 um
Very Small Comp 的基准大小
Align /
Mount
94 FLY_INSPR_METHOD Use 3 Const
0: 在Fly旋转后, 识别(使用贴装角度识别)
1: 在Fly识别后, 旋转(0度识别)
2: 在Fly识别后旋转.
仅限供给角度45和FineGrab时,旋转后识别
3: 在Fly识别后旋转.
仅限供给角度45, FineGrab 及FinePitch时, 旋转后识别
Software
15-13
Module No Name
Value
28 MOUNT_POS_CHECK_METHOD Use 0
贴装前确认是否在PCB内的功能
0: 确认.
1: 贴装 STOPPER在前面右侧.
2: 贴装 STOPPER在前面左侧.
3: 贴装 STOPPER 在后面右侧.
4: 贴装 STOPPER 在后面左侧.
30 SUPPORT_GRAB_AND_MOVE Use 1
Fix使用时 决定Grab后是否立即开始移动
0: 识别后, 移动.
1:GRAB 后移动.
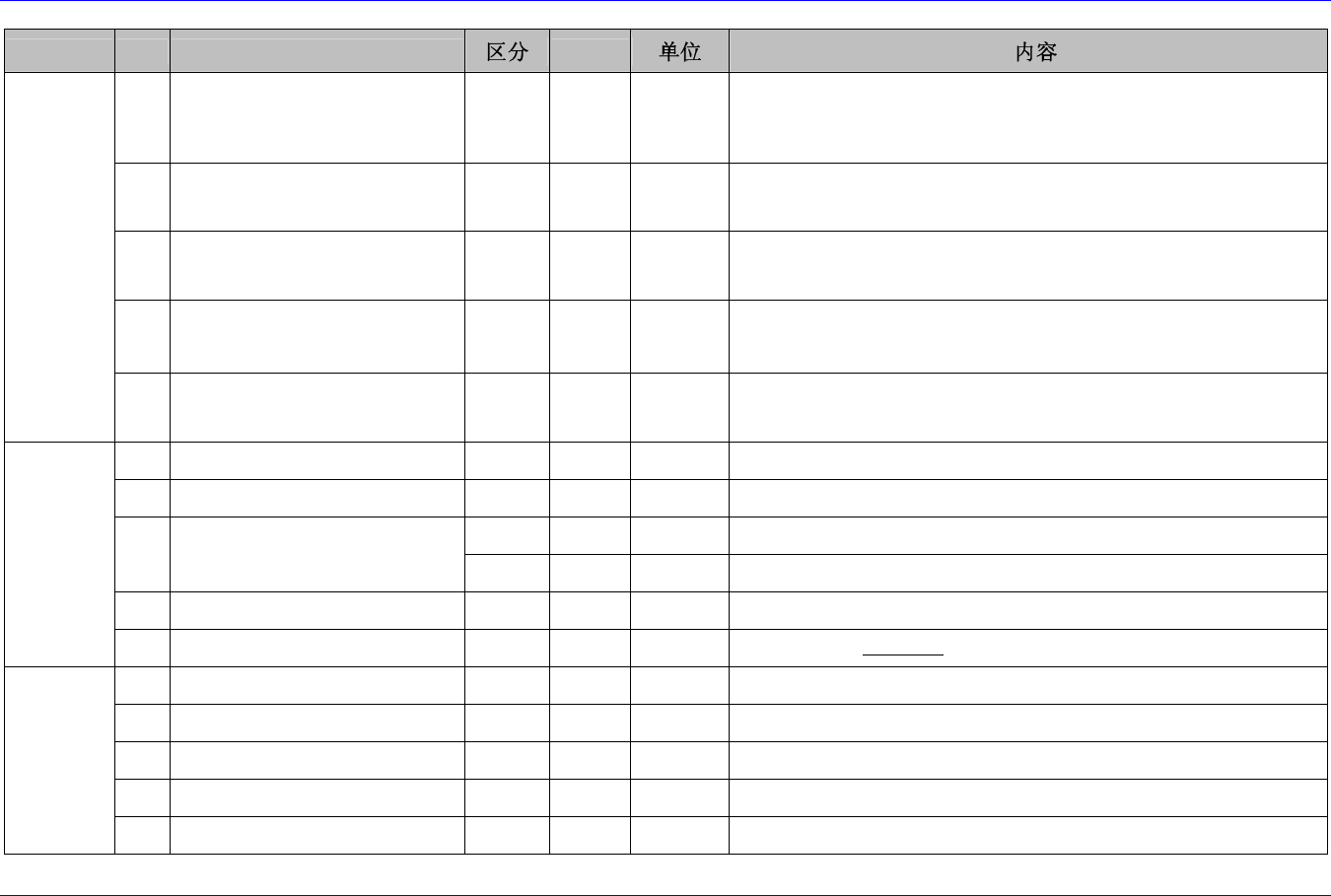
33 SUPPORT_FIX_SYNC_GRAB Use 1
Fix 中利用2个摄像机同时GRAB 使用与否
0: 不同时Grab , 1: 同时Grab.
34 SUPPORT_MOUNT_OPTI Use 1
对Mount Opti按其他顺序作业的选项使用与否
(Pick , Align, Mount…)
0: 不使用.
1: 使用.
35 METHOD_MOUNT_OPTI Use 4 Mount Opti 中顺序设定方法选项
51 USE_FLY_AUTOTEACH_RANGE Use 0 0, 1
1:自动示教部件时, 把FLY_AUTOTEACH_RANGE(52号)值使用为识别领
域.(仅限FLY camera)
0: 在全部画面识别.
52 FLY_AUTOTEACH_RANGE Use 0 um
参考51号项目
60 SUPPORT_SMART_PROFILE Use 95 const
Smart Profile
HTU
algorithm
UTH
62 FLY_CONST_TIME Use 25 msec Fly识别时,等速时间
63 FLY_DECSTART_TIME Use 90 msec Fly识别时,减速开始时间
69 SUPPORT_SMART_SEQ Use 1 Const
Smart Seq
HTU
algorithm
UTH
Samsung Component Placer SM321 Service Manual
15-14
Module No Name
Value
16 READY_RELAY_DELAY Use 800 msec
Ready Relay On到到检查为止的延迟时间
0: 使用基本值150msec程度.
其它: 根据设定值.
17 USE_UPS Use 0 Const
0:不使用UPS
1:使用UPS
18 CE_TYPE Use 0 Const
0: 不适用CE
1:适用CE
98 IGNORE_BUTDOWN_SENSOR Use 1 Const
0:有BUT下降传感器
1:无BUT下降传感器
H/W
49 HEAD_LIGHT_BOARD_TYPE 0 0 , 1
0 : 量产用照明bord
1 : 以前的照明bord
40 SYS_DELAY_XY1 Use 20 msec 一般的XY动作中使用的Daley
41 SYS_DELAY_XY2 Use 20 msec PickUp部件的XY动作中使用的Delay
8 msec
固定(Mount)部件的XY动作中使用的Delay (Polling)
42 SYS_DELAY_XY3
Use 2 msec 固定(Mount)部件的XY动作中使用的Delay (Polling)
43 SYS_DELAY_XY4 Use 40 msec 要求高程度的XY动作中使用的Delay
XY Move
44 SYS_BACKLASH_XY Use 5 um XY Backlash防止
HTU
algorithm
UTH
中使用的Zone
45 SYS_DELAY_Z1 Use 0 msec 一般的Z动作中使用的Daley
46 SYS_DELAY_Z2 Reserved 0 msec -
47 SYS_DELAY_Z3 Reserved 0 msec -
48 SYS_DELAY_Z4 Use 20 msec 要求高程度的Z动作中使用的 Delay
Z Move
49 SYS_BACKLASH_Z Reserved 0 um -