SM321 Service-CHI.pdf - 第92页
Samsung Component Plac er SM321 Service Manu al 8. 按照 Head 1 的校正方法,对 Head 2~ 6 执行校正。 9. 正常结束对所有磁头的 校正,则显示如下结果值。 R- 轴偏移的校正基准值 如下。 Real Max(Min): 命令值与测定值之间 的最大(最小)误差 Head1~Head6 : -0.50 0 ~ 0.500(deg) Err Max(Min) : …
Calibration
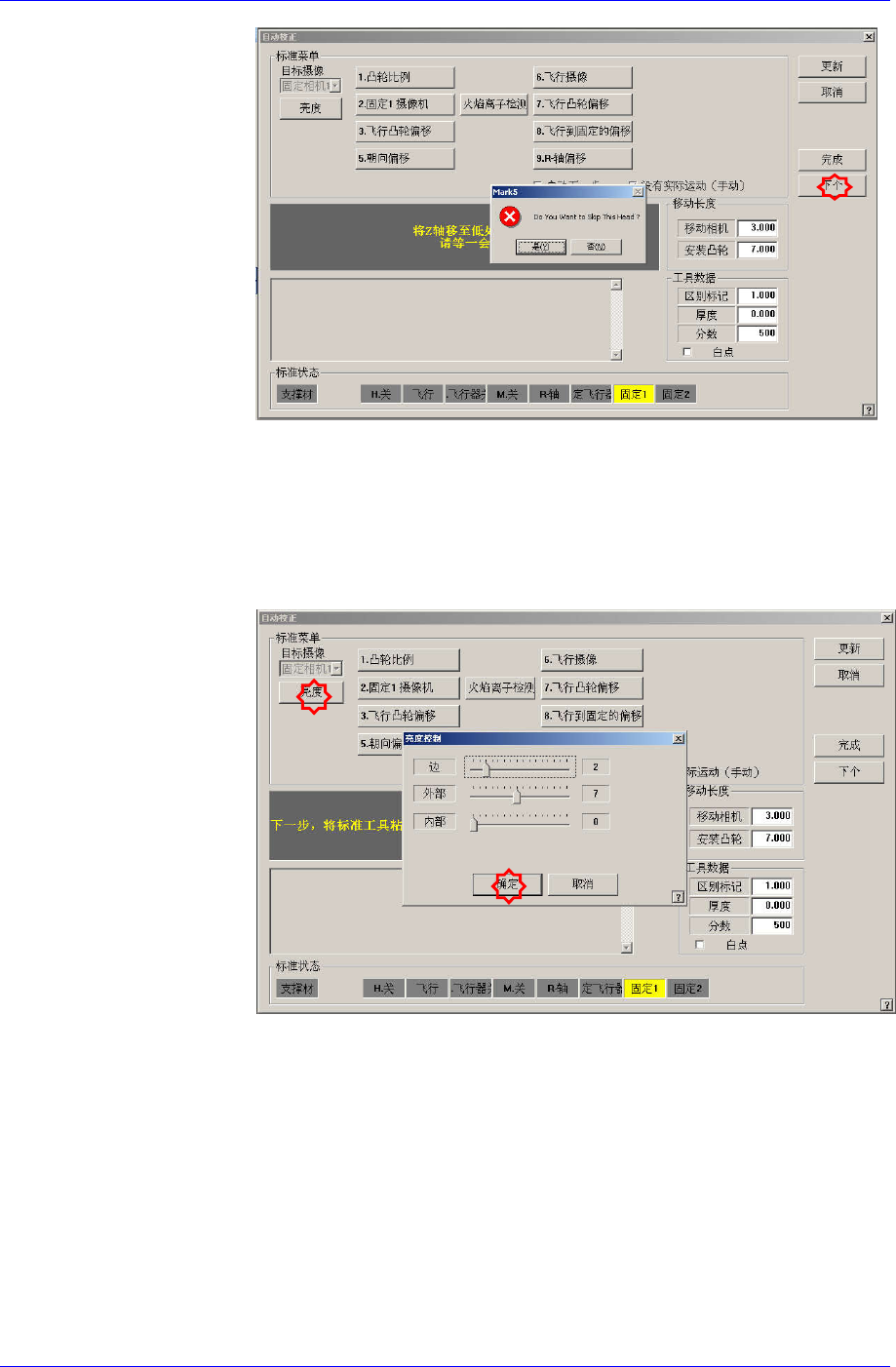
5. 显示“移动到中心位置 定 移动,点 [下一步]。”。为了
Assembly移动到 ix 中心位 ,请点击<下个> 按
钮。
“准备标准。对于 准 步]” 。此时,点击 <亮
度>按钮,在”亮度控制 对 Frame 的Calibration Too
Fiducial Mark明显 止 亮度后 <下个>按钮。
[固 1]摄像。 击
Head F 1 Camera的 置
6. 显示 标 ,点击[下一 消息
” 话框中Vis 窗显示
l上的 为 调整照明 点击
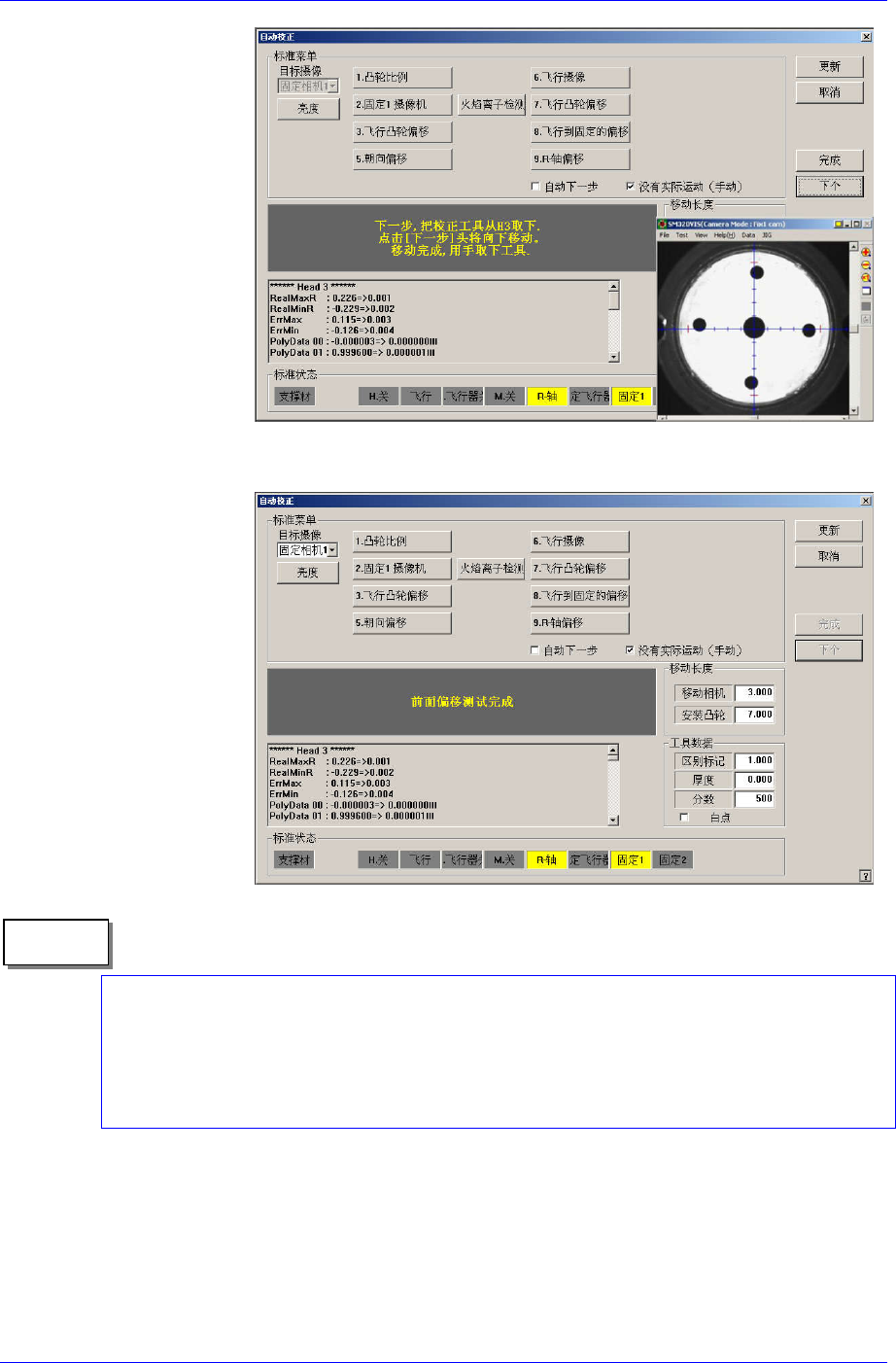
7. 自动执行 Calibration后 完 则如下图显示结果值。 , 成校正
3-43
Samsung Component Placer SM321 Service Manual
8. 按照Head 1的校正方法,对Head 2~ 6执行校正。
9. 正常结束对所有磁头的校正,则显示如下结果值。
R-轴偏移的校正基准值如下。
Real Max(Min): 命令值与测定值之间的最大(最小)误差
Head1~Head6 : -0.500 ~ 0.500(deg)
Err Max(Min) : 测定值与补偿值之间的最大(最小)误差
Head1~Head6 : -0.200 ~ 0.200(deg)
备 注
3-44
Calibration
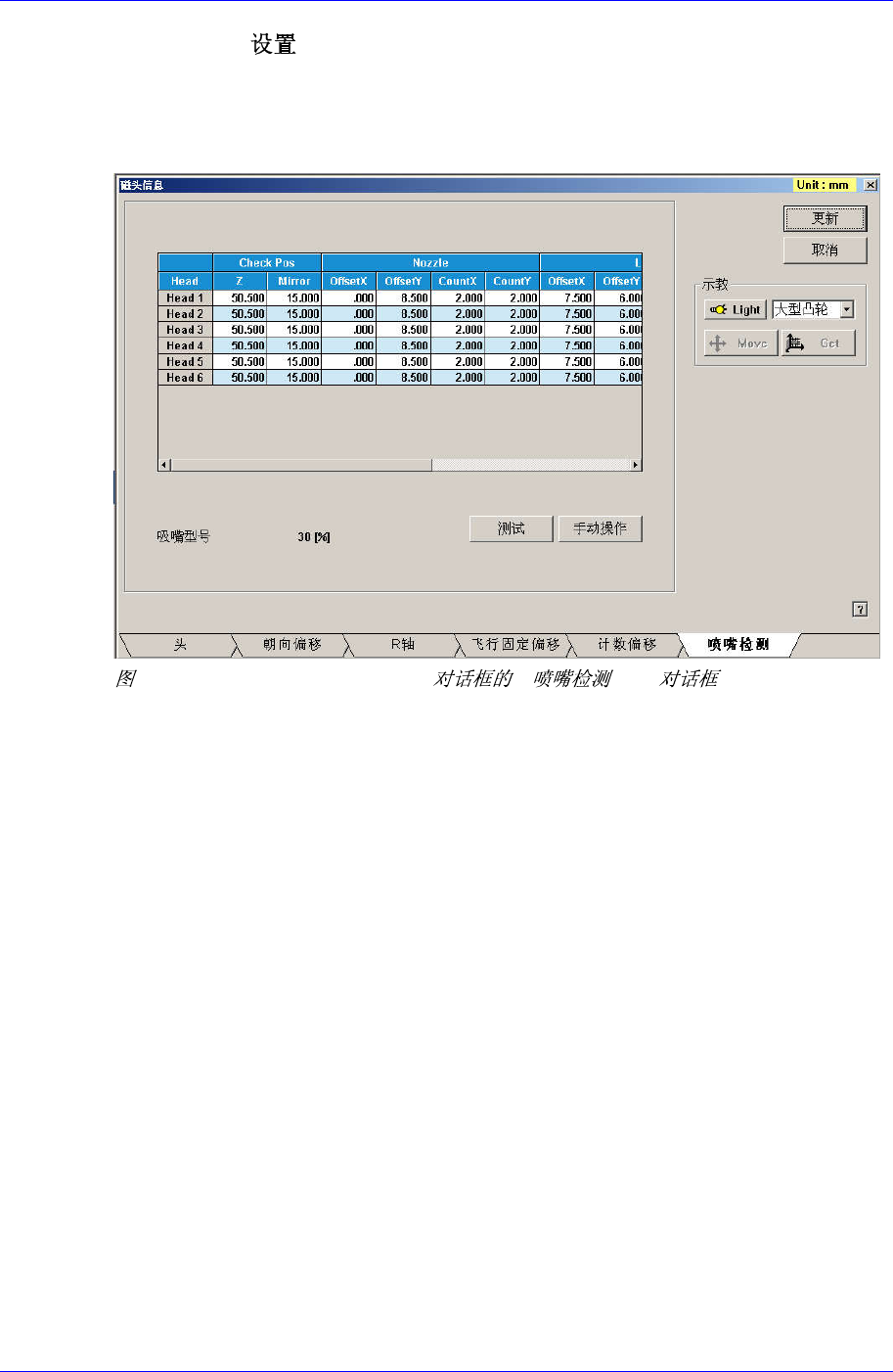
3.12. Nozzle Check
以下是头部Flying Vision替换或Nozzle Check功能有问题时,执行的校正。否则请
勿执行本校正过程。
可以利用Fly Camera检查贴片头是否安装了Nozzle。
3-4. “Sys. Set ation”
是否存在吸嘴时该贴片头 Z轴高 CB上面到贴 头的心轴
离表示。
R轴 位置 示。
在,比较吸嘴存 定区域的像素Binary值
,它以矩形Box 示在Vision
坐标系表示到该矩形B
st Box)中心位置的距离时,X轴方 为Offs t X,Y轴方
称为Offset Y。
Y
大小称为Count X,Y 称为Count Y。
Light
利用Fly Camera检查吸嘴是否存在时,照明是决定Test Box区域像素(Pixel)的
Binary值时最重要的因素。
up: Head Inform “ ” TAP
Check Pos
Z
表示检查 的 度,以P 片
(Spindle)尾端的距
Mirror
表示检查是否存在吸嘴时Mirro 的 ,以角度表
Nozzle
为了检查吸嘴是否存
后加以判断。
在及不存在时的特
这时,该特定区域称为Test区域 的形式显 屏幕上。
Offset X / Offset Y
以Vision屏幕的十字线中心为基准,如以Right-Down
ox(即Te
向的距离
向的距离称 e
Count X / Count
Test Box的X轴方向 轴方向大小
3-45