5. SM411F_Operation_Training(Kor_Ver4).pdf - 第31页
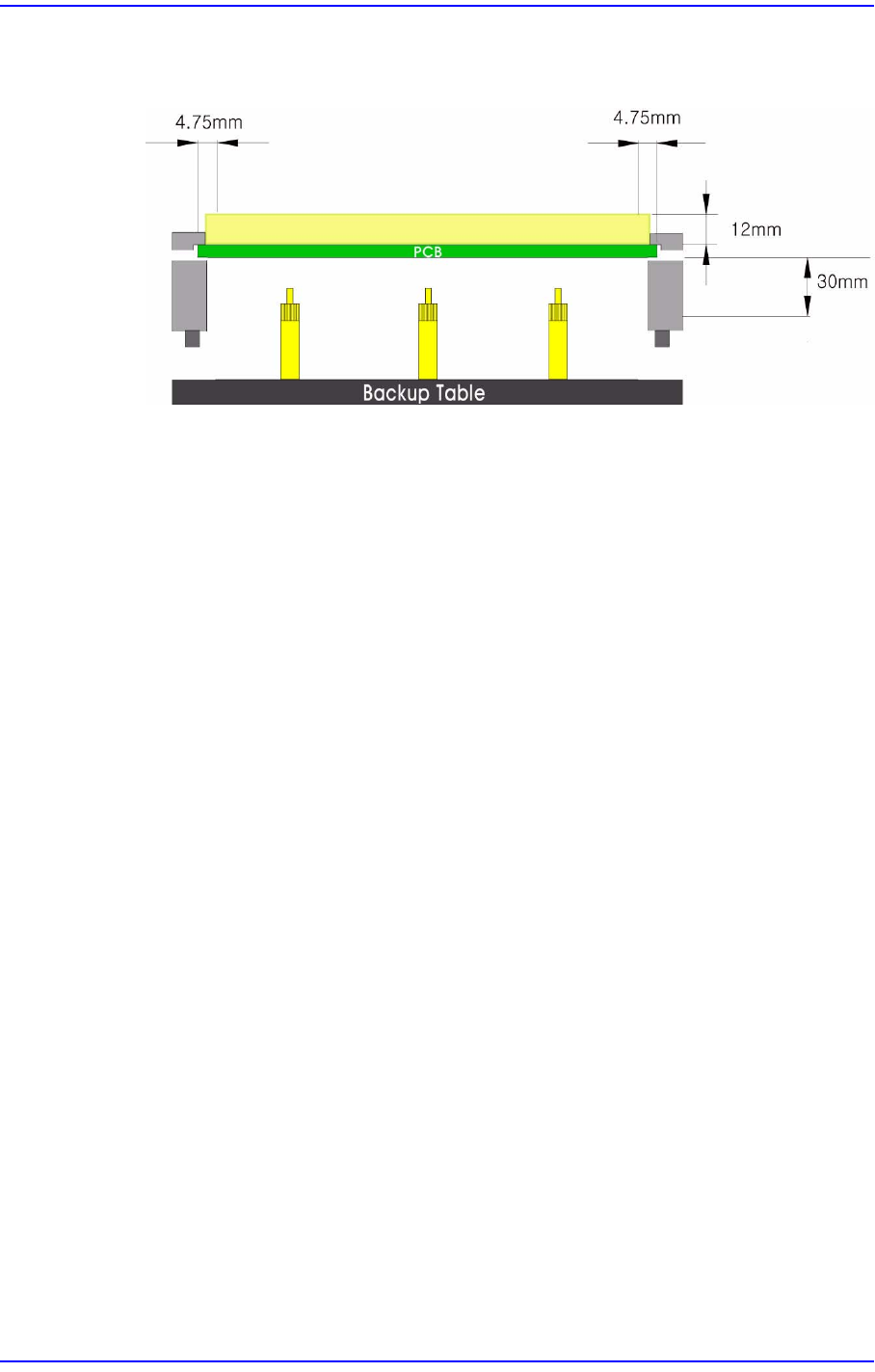
머리말 xix 작업스테이션으로부터 작업이 완료된 PCB 를 이송받아서 다음 장비로 PCB 를 운반합니다 . 헤드의 이동높이 (Move Z) 가 12mm 이므로 12mm 보다 큰 부품을 PCB 상면에 장 착할 수 없습니다 . 또한 , P CB 하면에 장착된 부품은 30mm 를 초과할 수 없습니다 . PCB 의 양쪽 가장자리는 4.75 mm 씩 사용할 수 없어 이 영역에는 부품을 장착할 수 없습…
Samsung Component Placer SM411/411N Operation Training
xviii
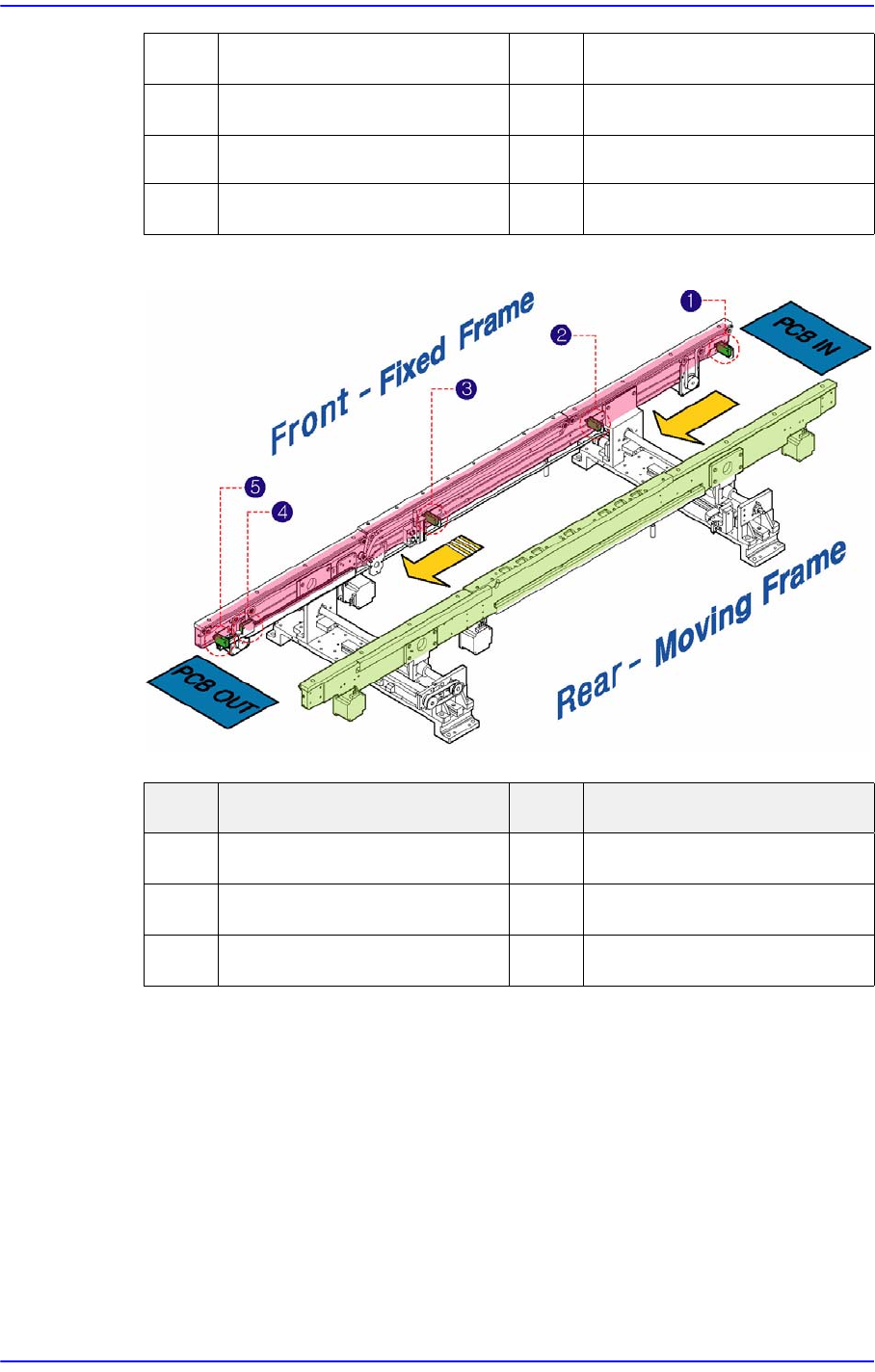
Conveyor
컨베이어는 크게 다음과 같이 세 부분으로 나누어집니다 . 좀 더 자세한 설명은
Introduction매뉴얼의 “6.3 PCB Conveyor System”을 참조하십시오.
Entry Conveyor
이전 장
비로부터 운반되어진 PCB를 작업스테이션으로 이송합니다.
W
orkStation (ST1F-Work, ST1R-Work)
Entry Conveyor로부
터 이송되어진 PCB를 장착위치에 고정시키고 장착작업
이 수행되도록 합니다.
Exit Co
nveyor
1
미러 구동 모터
5
플라잉 비전시스템
2
공압 장치
6
R축 모터
3
스핀들
7
피두셜카메라
4
Z축 모터
No. Name No. Name
1
입구 센서
4
퀵 로드 센서
2
대기 센서
5
출구 센서
3
장착 센서
머리말
xix
작업스테이션으로부터 작업이 완료된 PCB를 이송받아서 다음 장비로 PCB
를 운반합니다.
헤드의 이동높이(Move Z)가 12mm 이므로 12mm 보다 큰 부품을 PCB상면에 장
착할 수 없습니다.
또한, PCB하면에 장착된 부품은 30mm를 초과할 수 없습니다.
PCB의 양쪽 가장자리는 4.75 mm씩 사용할 수 없어 이 영역에는 부품을 장착할
수 없습니다.
백업테이블의 상승에 의한 PCB 클램핑 방식으로만 PCB를 고정합니다 . PCB클
램핑과 언클램
핑시 부드럽게 동작하도록 완충장치를 설치하였습니다.
Samsung Component Placer SM411/411N Operation Training
xx
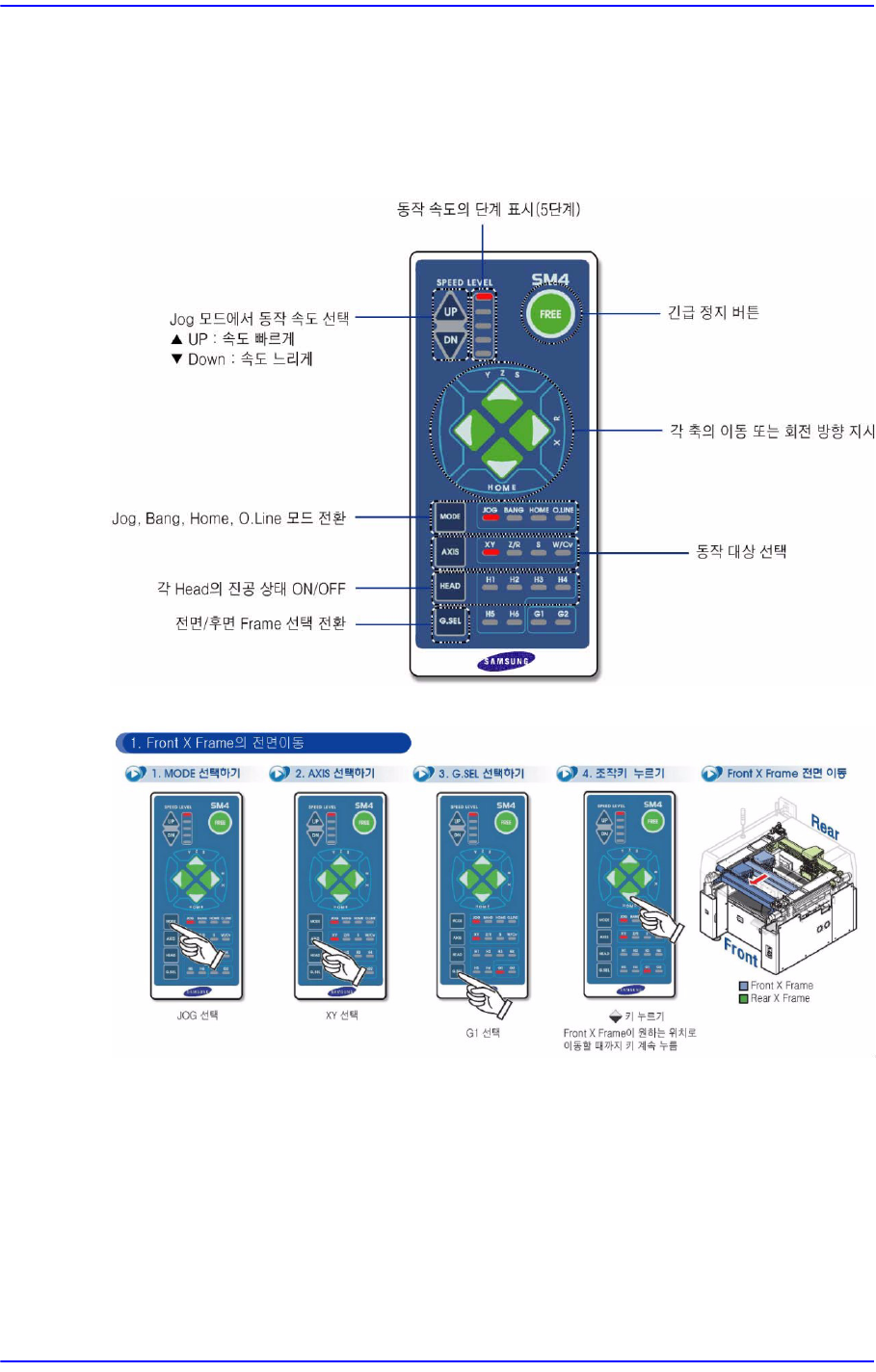
티칭박스 조작
헤드의 조작이나 원점복귀 및 부품의 흡착과 장착위치를 티칭하는데 사용됩니다.
티칭박스는 장비의 상태가 ‘IDLE’ 일때 사용할 수 있습니다 .
티칭 박스의 버튼에 대한 설명은 다음과 같습니다