5. SM411F_Operation_Training(Kor_Ver4).pdf - 第79页
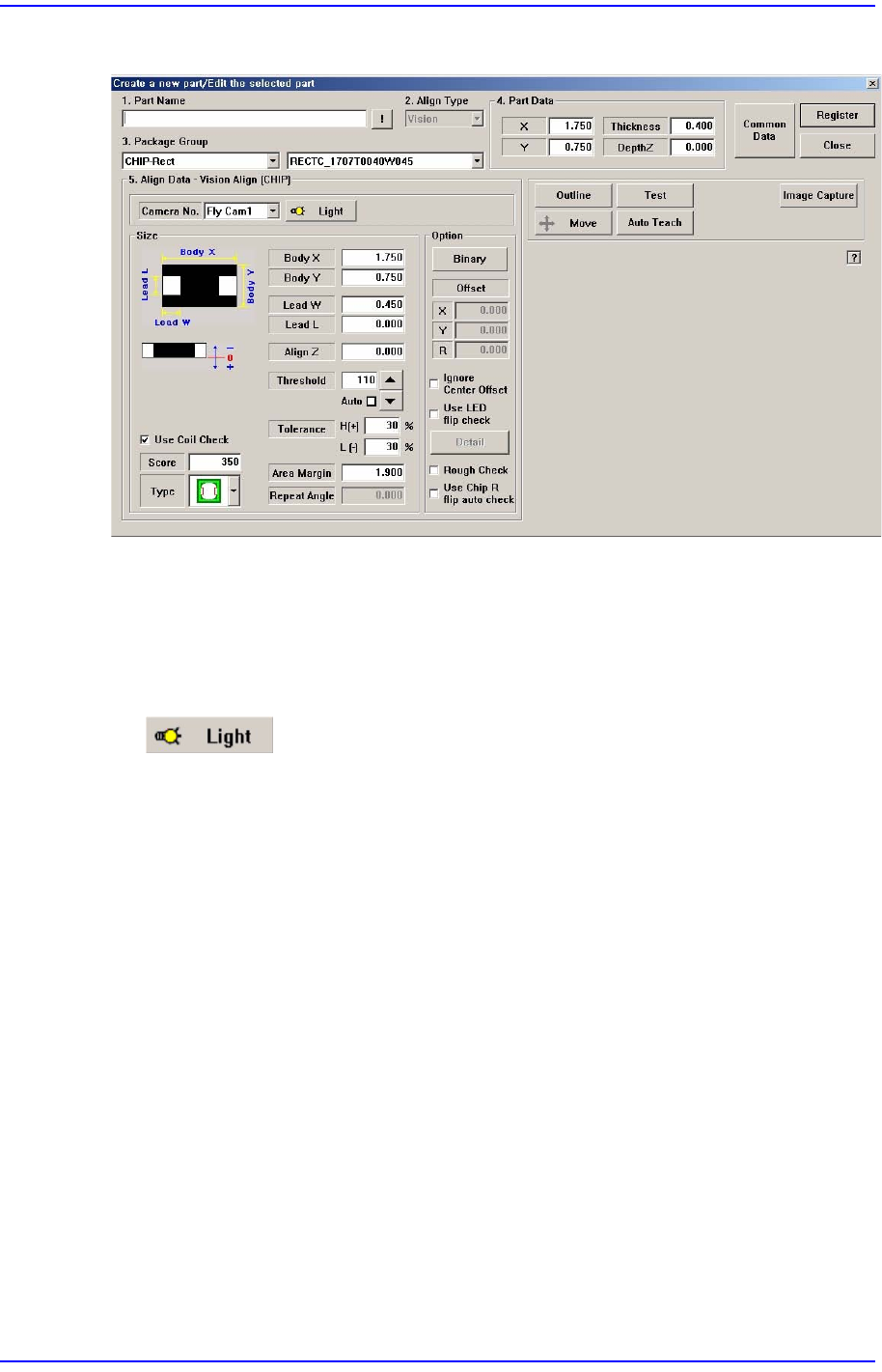
3-21 MMI 따라하기 Ⅱ 3.2.1. 새로운 부품 등록 <Camera No.> 콤보박스 부품을 인식할 카메라를 선 택합니다 . 선택 가능한 카메라는 다음과 같습니다 ; Fix Cam: Fix 카메라를 선 택합니다 . 티칭 용 도로만 활용됩니다 Fly Cam: Fly 카메라를 선택합니다 버튼 부품을 인식할 카메라의 조명을 설정합니다 . Body X/Y 부품의 B…

3-20
Samsung Component Placer SM411/411N Operation Training
에 등록할 부품명을 선택.
버튼 클릭해서 <Add Part to DB:> 또는 <Update DB From Part:> 리스트박스
에 Local Part DB에 등록할 항목 추가.
<Update Data> 버튼 클릭하여 해당 부품을 Local Part DB에 등록.
[PCB 파일을 열때 부품정보 업데이트 기능]
PCB 파일을 열 때, 동일한 부품명을 가진 부품 정보에 대해서 PCB파일 내의 부
품 정보와 Local DB (UPD.mdb) 내의 부품 정보를 어떻게 관리할 것인지를 선택
합니다.
None
PCB 파일 내의 부품 정보
를 가져오고, Local DB에는 부품 정보를 업데이트
하지 않습니다.
파트 라
이브러리로 부터 PCB 부품 업데이트
열려는 PCB 파일 내의 부
품명과 동일한 부품명을 가진 부품 정보가 Local
DB에도 존재한다면, PCB 파일의 부품 정보를 가져오지 않고 Local DB의 부
품 정보를 가져오도록 합니다.
PCB 부품으
로부터 부품 라이브러리 업데이트
열려는 PCB 파일 내의 부품명
과 동일한 부품명을 가진 부품정보가 Local DB
에도 존재한다면, PCB 파일의 부품 정보를 가져오고 , 부품 정보를 Local DB
에 업데이트합니다.
PCB와 DB의 부품 동기화
열려는 PCB 파일 내 부품 정보가 Local DB의 부품 정보로 Overwrite 되고,
PCB 파일을 저장할 때는 PCB파일 내의 부품 정보가 Local DB에 저장됩니
다.
3-21
MMI
따라하기
Ⅱ
3.2.1. 새로운 부품 등록
<Camera No.> 콤보박스
부품을 인식할 카메라를 선택합니다. 선택 가능한 카메라는 다음과 같습니다;
Fix Cam: Fix 카메라를 선택합니다. 티칭 용도로만 활용됩니다
Fly Cam:
Fly 카메라를 선택합니다
버튼
부품을 인식할 카메라의 조명을 설정합니다 .
Body X/Y
부품의 Body Size를 측정하여 입력하거나, 부품을 정상적으로 흡착한 후, Auto
Teach 기능을 이용하여 자동으로 부품의 사이즈를 업데이트할 수도 있습니다.
Lead W/L (리드 폭/길이 )
부품 리드의 크기를 입력합니다. 리드가 없는 부품은(R) "0"을 입력합니다.
입력된 값이 있다면, 부품 인식 시 Body Size는 무시되며 리드의 면적으로 부품
을 인식하여 정상유무를 판단하고 틀어짐
을 보정합니다.
Threshold (임계치)
부품을 인식하는 Gray Level로 0 ~ 255(0:흑, 255백) 까지의 기준값 입니다. 부품
을 인식할 때 흑백을 나누는 기준이 되는 값입니다.
(보편적인 사용법은 Auto입니다.)
Tolerance ( 허용오차)
부품 크기의 편차입니다.
3-22
Samsung Component Placer SM411/411N Operation Training
<Tolerance H[+]>
부품을 인식할 때, 상위 허
용오차를 백분율로 설정합니다.
<T
olerance L[-]>
부품을 인식할 때, 하위 허
용오차를 백분율로 설정합니다.
Auto Teach (자동 인식)
부품의 Align 데이터를 자동으로 구합니다.
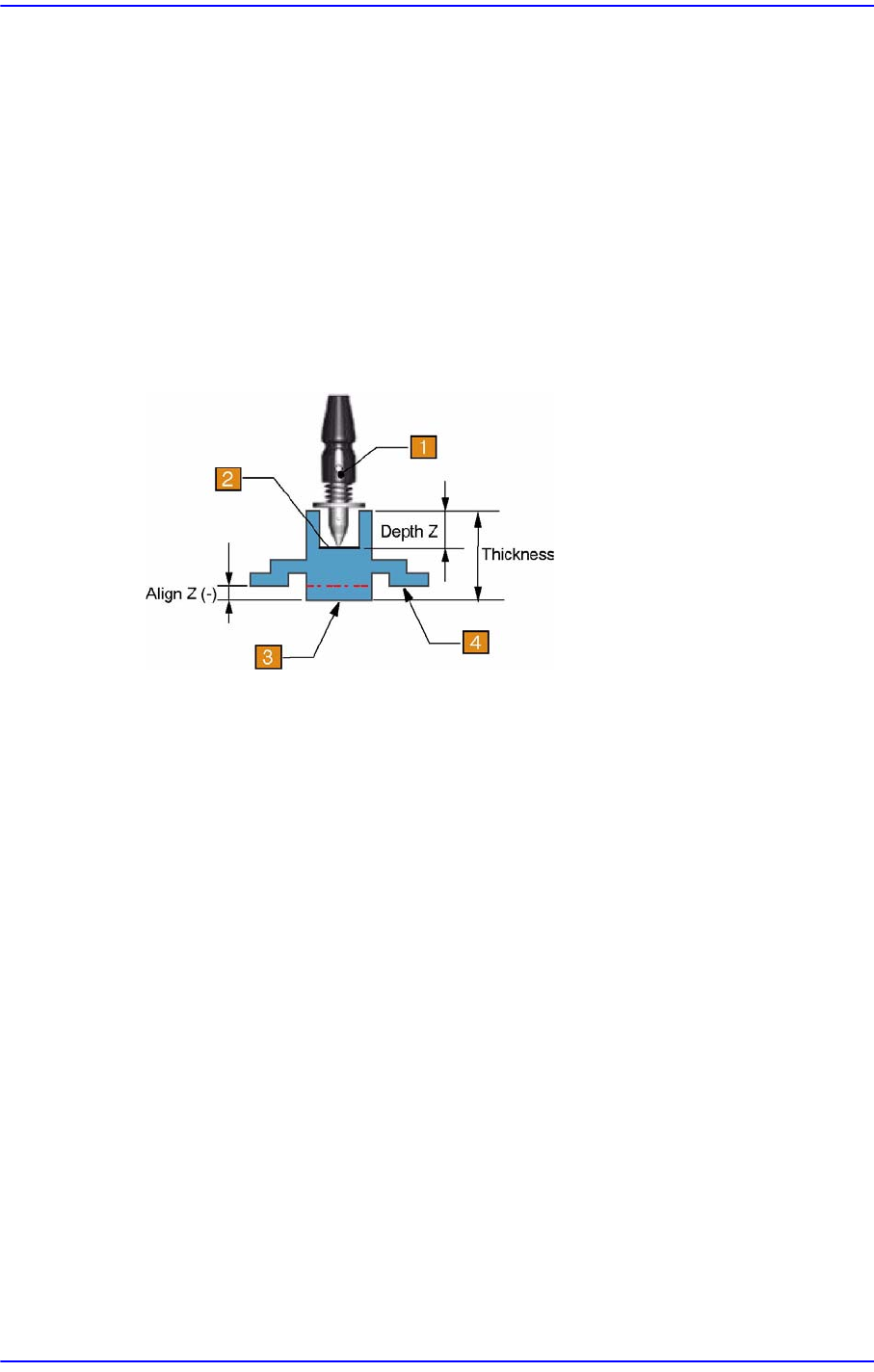
Thickness (두께 )
부품의 두께를 의미합니다. 장착 시 Z축은 PCB상면으로부터 부품의 두께만큼
덜 내려가 부품에 과도한 충격을 주지 않도록 설계되어 있습니다.
1:
노즐
2:
부품의
흡착면
3:
부품의
바닥면
4:
부품의
장착면
Area Margin (오차 넓이)
부품을 흡착(Pickup)했을 때 , 정상적인 경우에는 흡착된 부품의 중심이
AreaMargin ‘0’ 영역 내에 있어야 합니다.
즉, 부품의 크기에 Area Margin이 더해진 영역을 부품인식영역이라고 한다면 흡
착된 부품의 형상은 부품인식영역내에 있어야 합니다.
그러나 다른 외부적인 요인에 의해 흡착된 부품의 중심이 AreaMargin ‘0’ 영역을
벗어났으나, 벗어난 정도를 보정하여 부품을 정상적으로 장착할 수 있는 경우라
면, ‘오차 넓이’를 설정
함으로써 기구적인 중심을 기준으로 부품의 중심을 검사
하는 영역을 크게하여 벗어난 부품의 중심을 이 영역내로 포함시켜서 해당 부품
을 정상적으로 장착할 수 있습니다 .
부품의X방향 크기의 1/2을 입력합니다. 일반적으로0~6범위 내에서 값을 설정
합니다. 디폴트은2입니다.