5. SM411F_Operation_Training(Kor_Ver4).pdf - 第96页
3-38 Samsung Componen t Placer SM411/411N Operation Training Tr i m m e r 에 대해서만 적용됩니 다 . 3.2.2.5. TR 부품 등록 TR 부품은 부품공급장치로부터 부품을 흡착하면 ‘Part R’ 이 90 도로 자동으로 변환 되어 Lead 가 상하로 배 열됩니다 . 다음 그림과 같은 TR 은 아래와 같이 등록합니다 . Lead P…
3-37
MMI
따라하기
Ⅱ
메 모 0603의 Align Data 설정
0603R은 정상적으로 흡착된 경우와 비정상적으로 흡착된 경
우의 이미지의 차이가 적기 때문에 Tolerance 항목의 L 을
10%로 설정해야 합니다.
0603C는 조명상태에 따라 부품의 크기가 약간씩 다르게 보
이기 때문에 Tolerance항목의 L 을 20%로 설정해야 합니다.
0603L은 0603C와 동일하게 설정하십시오.
‘자동 인식’ 기능을 이용하여 부품을 등록하는 것을 권장합
니다.
Chip C 부품등록
기본적인 입력은 Chip R과 동일하며 , Lead W(리드폭) 만 추가 입력하십시오.
Chip Tantal 부품등록
Chip R과 등록방법 및 순서가 동일하며, Lead W(리드폭)과 Lead L(리드길이 ) 만 추
가 입력하십시오.
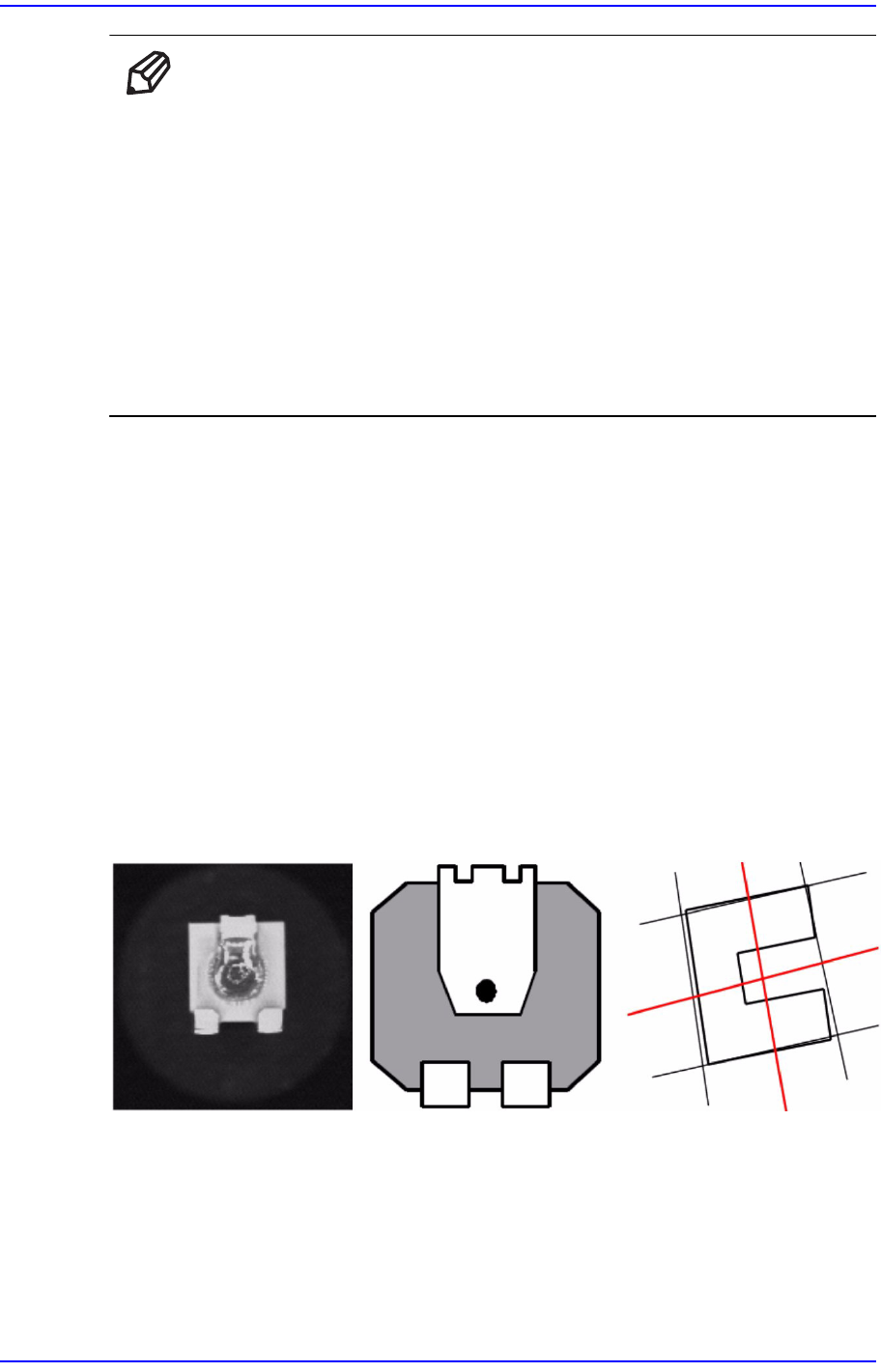
3.2.2.4. Trimmer 부품 등록
Trimmer는 일반 Chip 부품 외곽 인식과 다르며, 부품 등록화면에 Up Foot L과 Down
Foot L 이 입력됨 (범위 : 0 ~ 2mm이내)
Body 외곽 검사 방법이므로, 내부 검정색 원은 검사 하지 않으며, 부품 Body가 검정
색 계통이면 TR 로 등록하면 됨.
<Rough Chek> 체크 박스
부품을 인식할 경우, 인식하려는 부품의 형상이 비전알고리즘의 데이터와 정확
히 부합되지 않아 인식시 오류가 발생된다면, 이 체크박스를 선택하십시오.
이 체크
박스가 선택되면, 인식하려는 부품의 특정 형상이 비전 알고리즘의 데이
터와 비교해서 다소 부정확하더라도 전체 부품의 레이아웃을 체크해서 동일하
다면 정상적으로 부품을 인식합니다.
3-38
Samsung Component Placer SM411/411N Operation Training
Trimmer 에 대해서만 적용됩니다.
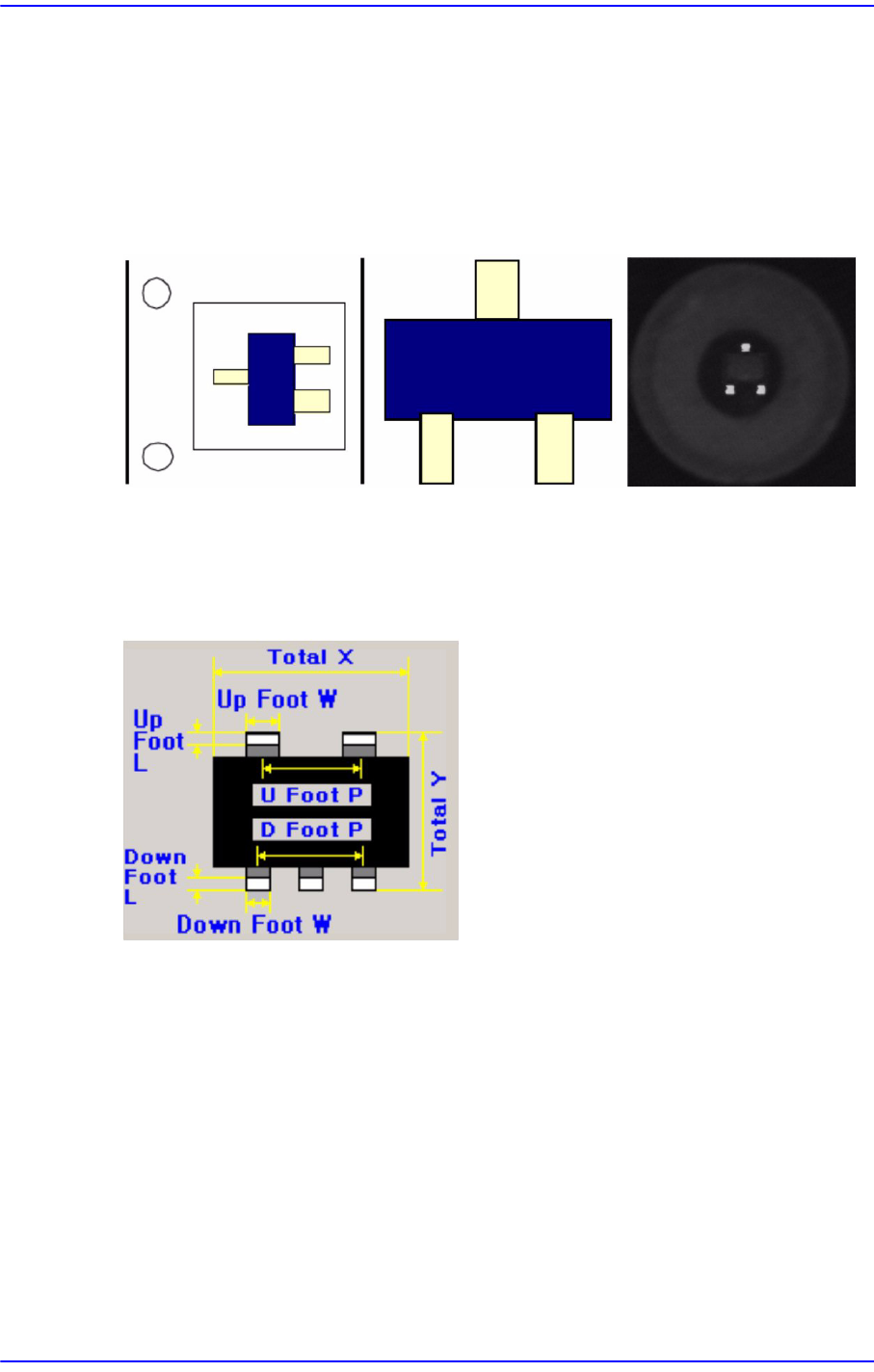
3.2.2.5. TR 부품 등록
TR 부품은 부품공급장치로부터 부품을 흡착하면 ‘Part R’이 90도로 자동으로 변환
되어 Lead가 상하로 배열됩니다.
다음 그림과 같은 TR은 아래와 같이 등록합니다.
Lead P는 리드의 처음과 끝간 거리를 의미합니다. IC부품의 Pitch와는 다릅니다.
Algorithm
<Heat> 체크박스
부품 몸체
에 방열판이 부착되어 있는 경우에 선택합니다. 이 기능을 선택하
면 상부 리드가 2개 이상인 경우, 상부 리드를 인식하지 않고 하부 리드만 인
식합니다.
<Light> 버튼
Front Light에 적절한 인식 알고
리즘을 설정합니다. 부품이 배경보다 밝은 경
우에 사용합니다.
[Tape Reel로 공급될 때 ][부품 등록 방향]
Up Lead Num(상단리드개수 ): 2
Down Lead Num(하단리드개수 ): 3
Up Lead P(상단리드 P): 4.5
Down Lead P(하단리드 P): 4.5

3-39
MMI
따라하기
Ⅱ
Back Light에 적절한 인식 알고리즘을 설정합니다. 부품이 배경보다 어두운
경우에 사용합니다.
3.2.3. 부품의 등록
3.2.3.1. SOP 부품의 등록
<Lead Num>
한 변의 Lead의 개수를 설정합니다
<Missing Pin>
Lead Group에서 비어 있는 Lead개수를 설정합니다. 비어있는 Lead는 리드의 중
앙부분에 설정됩니다.
비대칭으로 비어있는 Lead인 경우 User IC로 등록해야 합니다
Repeat Angle
비전 인식 결과 만큼 각도를 보정하고 다시 인식하여 장착하는 기능입니다. 예
를 들어 <Repeat Angle> 에디트박스에 ‘0.1’이라고 입력하면 인식한 결과가 0.1
보다 크면 다시 각도 보정하여 인식합니다 .
인식결과가 0.1보다 작아질 때까지 계
속하며, 0.1보다 작은 인식결과가 나오면
장착합니다. 최대 4회까지 인식을 시도힙니다.
주로 Lead (혹은 Ball) Pitch가 0.5 mm 이하인 고정도 IC 부품에 적용됩니다.
<MFOV Type> 콤보박스
MFOV는 부품의 크기가 카메라의 FOV(Field Of View)를 벗어난 경우 이미지를
분할해서 부품을 인식하는 기능입니다.
여기서는 분할인식 유형을 설정합니다. 이 기능은 <Camera No.> 콤보박스에서
FixCam 선택시만 활성화됩니다.
SOP, SOP2, SOJ, SOJ2, QFP, PLCC, UserIC 등에만 적용됩니다.
Cross 2P
: 대각으로 마주 보는 두 모서리를 분할 인식.
Cross 4P
: 4 모서리를 분할 인식을 합니다 .
Linear H : 수평으
로 2 분할 인식을 합니다.
Linear V : 수직으
로 2 분할 인식을 합니다.
<MFOV Length>
분할인
식시 이동거리를 설정합니다 .