Nordson_EFD_RV_Series_Operating_Manual - 第89页
RV Series Automated Dispensing Systems 89 www.nordsonefd.com info@nordsonefd.com +1-401-431-7000 Sales and service of Nordson EFD dispensing systems are available worldwide. Operation After the system is installed and pr…
RV Series Automated Dispensing Systems
88 www.nordsonefd.com info@nordsonefd.com +1-401-431-7000 Sales and service of Nordson EFD dispensing systems are available worldwide.
To Use the PicoTouch Parameter Update Command in a Program
PREREQUISITES
A PICO Toµch Controller is properly installed and connected to the automated dispensing system.
The PICO Toµch parameters are saved in a *.PICO file as described in the previous two procedure.
# Click Step Reference Image
1
>
PICOTOUCH
PARAMETER
UPDATE
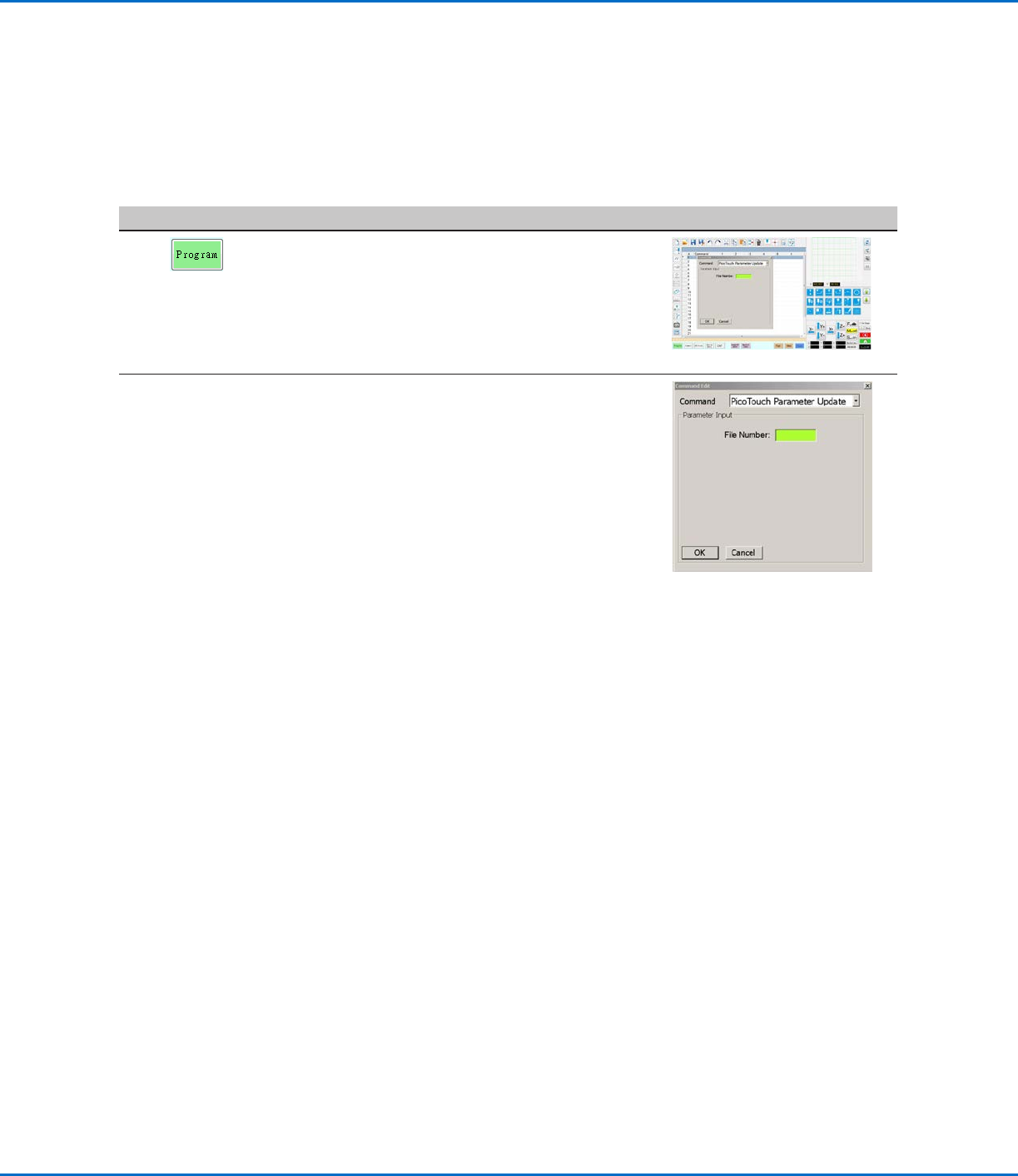
• Click the PROGRAM tab
• Double-click the address row where you want
to implement the saved PICO Toµch Controller
settings and select PICOTOUCH PARAMETER
UPDATE.
2 xxxxxxxx • In the FILE NUMBER field, enter the *.pico file
name that contains the PICO Toµch parameters
you want the system to use.
NOTE: The data entered for File Number must
exactly match the *.pico file name.
• Click OK to save.
NOTE: Multiple PicoTouch Parameter Update
commands can exist in the same program. When
the system switches to a new update command,
the Toµch Controller screen updates as well.
Note that delays can occur when switching
programs, for both the running program and the
update of the Toµch Controller screen.
How to Adjust PICO Parameters Using DispenseMotion (continued)

RV Series Automated Dispensing Systems
89www.nordsonefd.com info@nordsonefd.com +1-401-431-7000 Sales and service of Nordson EFD dispensing systems are available worldwide.
Operation
After the system is installed and programmed, the only actions required
from the operator are to switch on the system, run the program for the
workpiece, and shut down the system at the end of the work period.
Starting the System and Running a
Program
1. Switch on the DispenseMotion controller, monitor, and
robot.
2. Double-click the DispenseMotion icon to open the
dispensing software.
3. Click HOME.
The robot moves the camera to the home position (0, 0, 0)
and the system is ready.
4. Enable the dispensing system, including the valve controller. Refer to
the dispensing equipment manuals as needed.
5. Open the program file for your application.
6. Place the workpiece in the correct location on the fixture
plate.
7. Press the START button on the front of the robot, or click
RUN on the monitor.
8. When necessary, refer to the dispensing system manuals
to refill the dispenser.
9. If an emergency occurs, press the EMERGENCY STOP
button.
EMERGENCY
STOP button
START button
DISPENSER
PURGE button
Running a Program by Scanning a QR Code
PREREQUISITES
QR code scanning is enabled. Refer to “AppendixD, QR Code Scanning Setup” on page134 to enable QR
code scanning.
A QR code is present on the robot work surface and is associated with a program. Refer to “AppendixD, QR
Code Scanning Setup” on page134 to associate a QR code with a program.
1. Position the workpiece on the fixture plate.
2. Press the START button on the front of the robot, or click RUN on the monitor.
The system jogs to the predefined location where a QR code is located, scans the QR code, opens the
associated program, and executes the program.
RV Series Automated Dispensing Systems
90 www.nordsonefd.com info@nordsonefd.com +1-401-431-7000 Sales and service of Nordson EFD dispensing systems are available worldwide.
Pausing During a Dispense Cycle
Press START at any time to pause the system during a dispense cycle; the system pauses at its current position.
NOTE: If the system is paused when the dispenser is open, pattern integrity will be compromised.
Purging the System
To purge the system, press the DISPENSER PURGE button.
NOTE: You can set up the system to purge automatically. Refer to “How to Set Up Auto Purge, Program Cycle
Limits, or Fluid Working Life Limits” on page84.
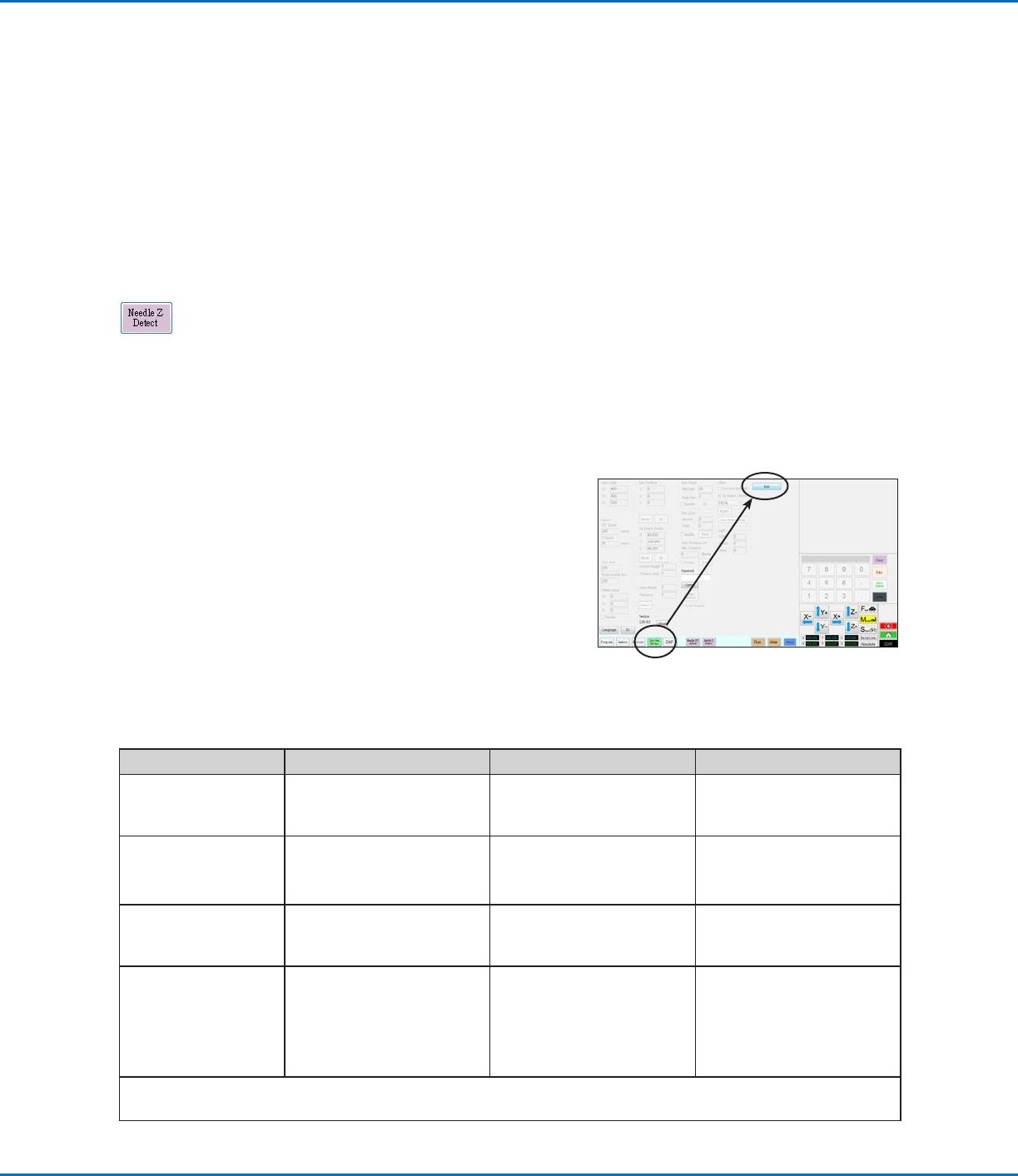
Updating Offsets
After running a program repeatedly for several hours, click NEEDLE Z DETECT (systems with tip detection)
or NEEDLE XY ADJUST (systems without a tip detection) to update the system to compensate for minute
changes that can occur after long periods of operation.
Refer to “How the System Responds to Needle Z Detect or Needle XY Adjust” on page57 for a detailed
description of the system response to a Needle XY Adjust selection.
Shutting Down the System
1. Click SYSTEM SETUP > EXIT to close the DispenseMotion
software. If prompted to save a file, select YES or NO.
2. Switch off the following components:
• DispenseMotion controller
• Monitor
• Robot
3. Refer to the dispensing system manuals for any special
shutdown instructions.
Part Numbers
Part # / Model R3V R4V R6V
Part #
(robot with fixed-
mount camera)
7363556 7363557 7363558
Part #
(robot with rotating-
mount camera*)
7363673 (base robot, no
vision)
7364066 (vision kit)
7363675 (base robot, no
vision)
7364066 (vision kit)
7363677 (base robot, no
vision)
7364066 (vision kit)
Part # Europe**
(robot with fixed-
mount camera)
7363572 7363573 7363574
Part # Europe**
(robot with rotating-
mount camera*)
7363674 (base robot, no
vision)
7364067 (vision kit)
7727235 (keyboard and
mouse)
7363676 (base robot, no
vision)
7364067 (vision kit)
7727235 (keyboard and
mouse)
7363678 (base robot, no
vision)
7364067 (vision kit)
7727235 (keyboard and
mouse)
*Order all part numbers listed. Vision kit includes camera, PC, and monitor.
**Complies with European safety regulations.