YSP20_Users_C.pdf - 第277页
A-6 A 1.3.2 NEXTINTERFACE ■轨道 1 只要符合下列 1 〜 3 的条件,便开始传出基板。 1. 本机处于可传出基板的状态 (BAOUT ∶ ON) 2. 从下游机输入了传入基板的信号 (BUSYIN[N011320] ∶ ON) 3. 从下游机输入了正在自动运行的信号 (LRIN[N011323] ∶ ON) n 要点 · 基板传出过程中,如果下游机切断了 (OFF 状态 ) 正在自…
A-5
A
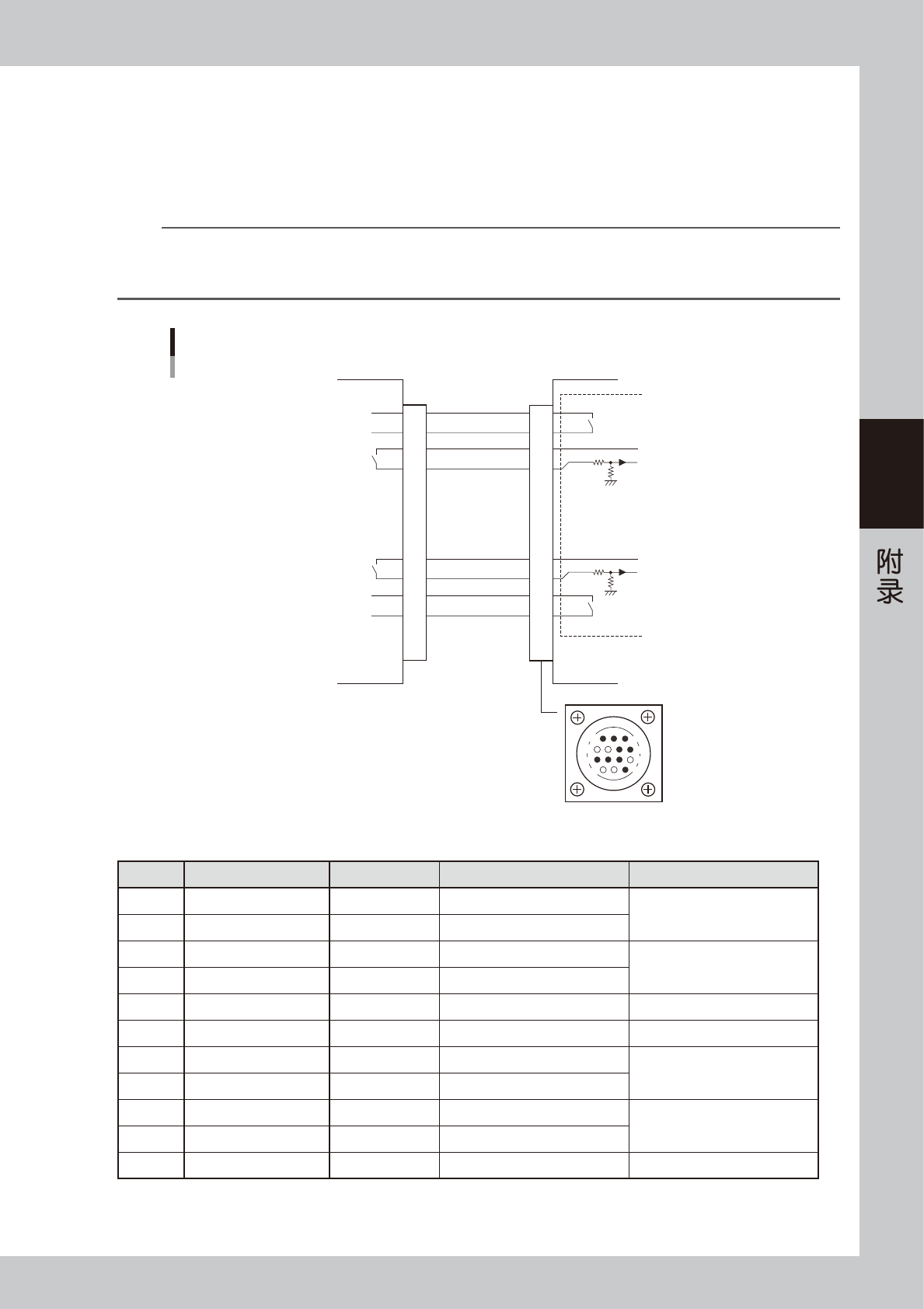
■轨道 2
只要符合下列 1 〜 3 的条件,便开始传入基板。
1.本机处于可传入基板的状态 (BUSYOUT2 ∶ ON)
2.从上游机输入了传入基板的信号 (BAIN2[N01102A3] ∶ ON)
3.从上游机输入了正在自动运行的信号 (URIN2[N01102A4] ∶ ON)
n
要点
· 基板传入过程中,如果上游机切断了 (OFF 状态 ) 正在自动运行的信号 (URIN2) 时,暂时停止传入基板。
· 判断传入的基板已经通过入口传感器后,切断 BUSYOUT2 信号 (OFF 状态 )。
· BUSYOUT2 和 BAIN2 信号都被切断时 (OFF 状态 ),结束传入基板。
7
12
4
8
1
14
11
3
PREVIOUS INTERFACE 电路
轨道 2
本机 PREVIOUS INTERFACE上游机
PREVIOUS INTERFACE 接口
BUSY OUT 2
(T110110)
BUSY IN 2
+24V
+24V
LR OUT 2
(T0110113)
LR IN 2
UR IN 2
(N01102A4)
UR OUT 2
BA IN 2
(N01102A3)
BA OUT 2
I/O BOARD
1
2
3
4
5
6
7
8
9
10
11
12
13
14
55A05-N3-00
■ 传送基板的信号 (PREVIOUSINTERFACE)
Pin No.
信号名 地址 输入和输出规格 信号规格
1 BUSY OUT 2 T0110110
继电器触点 ( 无电压 ) 输出 输出正在传入基板的信号
2 BUSY OUT 2 T0110110
继电器触点 ( 无电压 ) 输出
3 +24V
共模输入范围 (
+24V
) 输入要求传出基板的信号
4 BA IN 2 N01102A3
输入电压
5
空脚
(
有仿真针脚
)
( 防止误插入 )
6
〜
8
空脚
9 +24V
共模输入范围 (
+24V
) 输入正在自动运行的信号
10 UR IN 2 N01102A4
输入电压
11 LR OUT 2 T0110113
继电器触点 ( 无电压 ) 输出 输出正在自动运行的信号
12 LR OUT 2 T0110113
继电器触点 ( 无电压 ) 输出
13
〜
14
空脚
A-6
A
1.3.2 NEXTINTERFACE
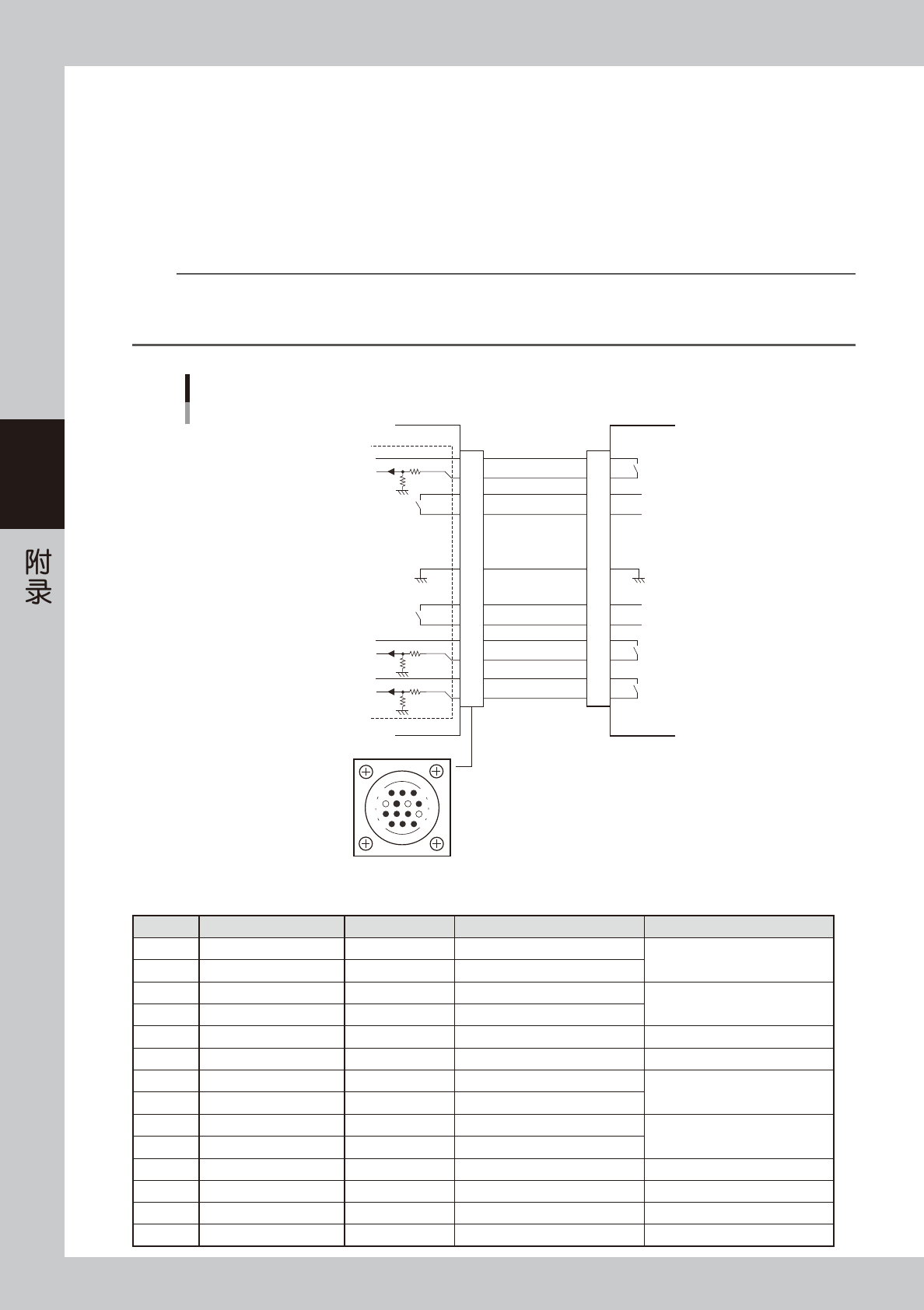
■轨道 1
只要符合下列 1 〜 3 的条件,便开始传出基板。
1.本机处于可传出基板的状态 (BAOUT ∶ ON)
2.从下游机输入了传入基板的信号 (BUSYIN[N011320] ∶ ON)
3.从下游机输入了正在自动运行的信号 (LRIN[N011323] ∶ ON)
n
要点
· 基板传出过程中,如果下游机切断了 (OFF 状态 ) 正在自动运行的信号 (LRIN) 时,暂时停止传出基板。
· 判断传出的基板已经通过出口传感器后,切断 BAOUT 信号 (OFF 状态 )。
· BUSYIN 和 BAOUT 信号都被切断时 (OFF 状态 ),结束传出基板。
14
11
12
7
4
8
3
1
NEXT INTERFACE 电路
轨道 1
NEXT INTERFACE 接口
本机 NEXT INTERFACE
下游机
BUSY IN
(N0110320)
BUSY OUT
+24V
+24V
UR OUT
(T01100E6)
LR IN
(N0110323)
+24V
LS IN
(N0110324)
UR IN
LR OUT
LS OUT
BA OUT
(T01100E5)
BA IN
I/O BOARD
GND GND
1
2
3
4
5
6
7
8
9
10
11
12
13
14
55A06-N3-00
■ 传送基板的信号 (NEXTINTERFACE)
Pin No.
信号名 地址 输入和输出规格 信号规格
1 +24V
共模输入范围 (
+24V
) 输入正在传入基板的信号
2 BUSY IN N0110320
输入电压
3 BA OUT T01100E5
继电器触点 ( 无电压 ) 输出 输出要求传出基板的信号
4 BA OUT T01100E5
继电器触点 ( 无电压 ) 输出
5
空脚
6
空脚
(
有仿真针脚
)
( 防止误插入 )
7 GND
8
空脚
9 UR OUT T01100E6
继电器触点 ( 无电压 ) 输出 输出正在自动运行的信号
10 UR OUT T01100E6
继电器触点 ( 无电压 ) 输出
11 +24V
共模输入范围 (
+24V
) 输入正在自动运行的信号
12 LR IN N0110323
输入电压
13 +24V
共模输入范围 (
+24V
) 输入选择轨道的信号
14 LS IN N0110324
输入电压
A-7
A
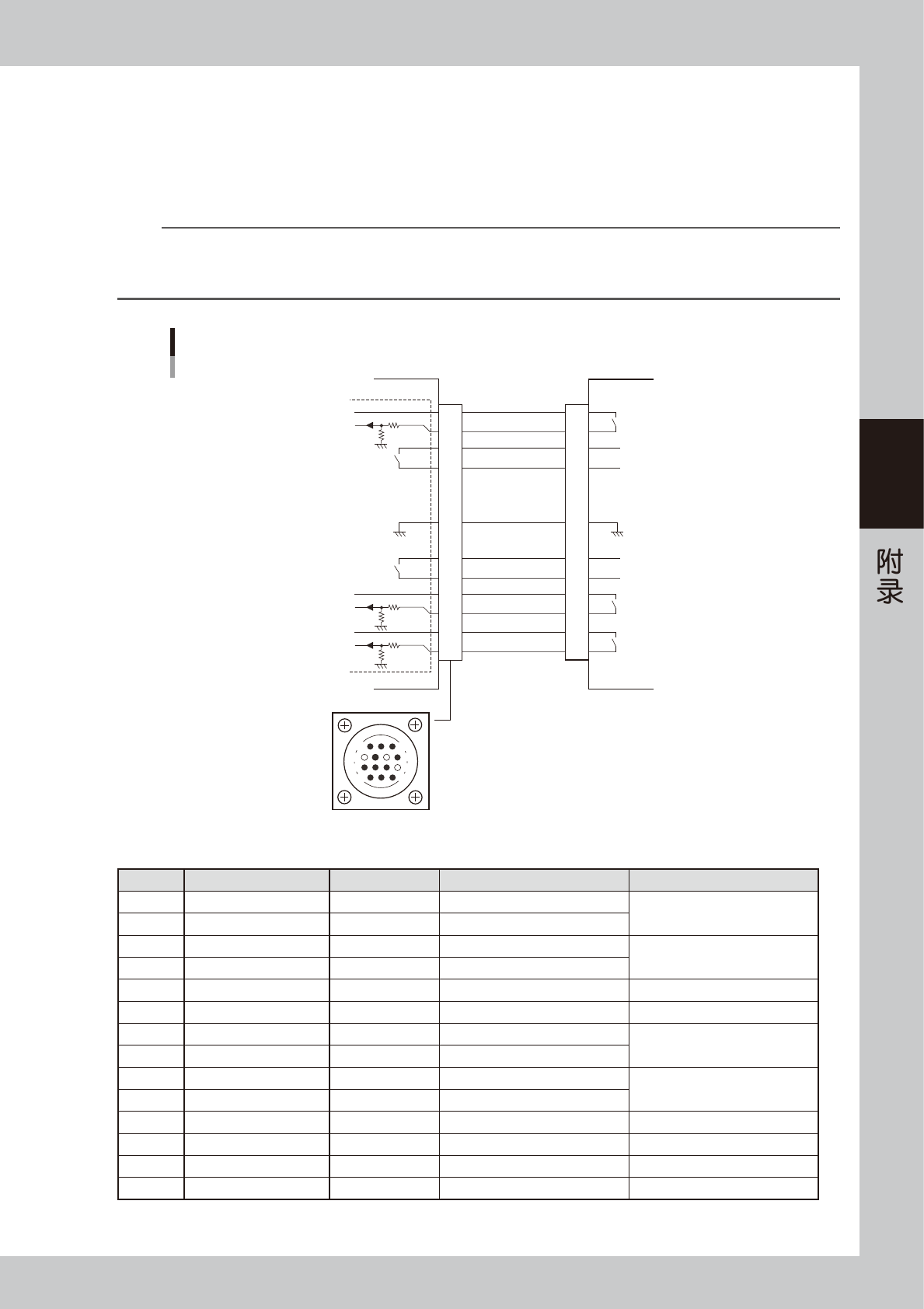
■轨道 2
只要符合下列 1 〜 3 的条件,便开始传出基板。
1.本机处于可传出基板的状态 (BAOUT2 ∶ ON)
2.从下游机输入了传入基板的信号 (BUSYIN2[N01102A2] ∶ ON)
3.从下游机输入了正在自动运行的信号 (LRIN2[N01102A5] ∶ ON)
n
要点
· 基板传出过程中,如果下游机切断了 (OFF 状态 ) 正在自动运行的信号 (LRIN2) 时,暂时停止传出基板。
· 判断传出的基板已经通过出口传感器后,切断 BAOUT2 信号 (OFF 状态 )。
· BUSYIN2 和 BAOUT2 信号都被切断时 (OFF 状态 ),结束传出基板。
14
11
12
7
4
8
3
1
NEXT INTERFACE 电路
轨道 2
NEXT INTERFACE 接口
本机 NEXT INTERFACE
下游机
BUSY IN 2
(N01102A2)
+24V
+24V
UR OUT 2
(T0110112)
LR IN 2
(N01102A5)
+24V
LS IN 2
(N01102A6)
BA OUT 2
(T0110111)
BUSY OUT 2
UR IN 2
LR OUT 2
LS OUT 2
BA IN 2
I/O BOARD
GND GND
1
2
3
4
5
6
7
8
9
10
11
12
13
14
55A07-N3-00
■ 传送基板的信号 (NEXTINTERFACE)
Pin No.
信号名 地址 输入和输出规格 信号规格
1 +24V
共模输入范围 (
+24V
) 输入正在传入基板的信号
2 BUSY IN 2 N01102A2
输入电压
3 BA OUT 2 T0110111
继电器触点 ( 无电压 ) 输出 输出要求传出基板的信号
4 BA OUT 2 T0110111
继电器触点 ( 无电压 ) 输出
5
空脚
6
空脚
(
有仿真针脚
)
( 防止误插入 )
7 GND
8
空脚
9 UR OUT 2 T0110112
继电器触点 ( 无电压 ) 输出 输出正在自动运行的信号
10 UR OUT 2 T0110112
继电器触点 ( 无电压 ) 输出
11 +24V
共模输入范围 (
+24V
) 输入正在自动运行的信号
12 LR IN 2 N01102A5
输入电压
13 +24V
共模输入范围 (
+24V
) 输入选择轨道的信号
14 LS IN 2 N01102A6
输入电压