Specification_SIPLACE_F5_eng.pdf - 第25页
24 Description Various fiducial mark shapes prov e to be optimal depen ding on the condition of the sur face. In the case of bare copper sur- faces with li ttle oxidation, the si n- gle cross i s particula rly reco m- me…
23
Description
With the SIPLACE F
5
a number of
vision modules with a central vi-
sion system to evaluate the re-
corded image data ensure a high
placement accuracy.
At the machine’s X-gantry the PCB
vision module finds position off-
sets on the part of the PCB in the
conveyor system. This module is
also required to measure the ma-
chine and/or the feeders on one
side of the table. This vision mod-
ule consists of a single CCD cam-
era with integrated lighting and op-
tics.
The offsets in the position of the
PCBs are determined with the
help of at least two but generally
three reference fiducial marks on
the PCB. When the PCB arrives
the gantry with its PCB vision
module moves to the programmed
mark position. The vision system
compares the recorded video im-
age with the sample stored in the
PCB description.
With the help of the correlation
principle the vision system can de-
termine the correct position even
when fiducial marks are incom-
plete or damaged (actual struc-
tures). It does so by making com-
parisons with programmed
nominal structures. The mark con-
figurations are not fixed; they can
be taught without restriction.
Additional functions of the PCB vi-
sion module are recognition of the
position of the feeders and ce-
ramic substrate (optional) and re-
cording of the machine data in-
cluding mapping.
In addition, the bad board recogni-
tion unit is moved over “ink spots”
with the aid of the PCB vision
module.
Vision Sensor Technology:
PCB Vision Module
Technical Data
Reference marks
Local marks
Library memory
Recognition of poor panels
up to 3 (subpanels and multiple panels)
up to 2 per component
(may be of different type)
up to 255 types of reference marks
per subpanel
Image processing
Correlation principle based on
gray values
Illumination Front light
Recognition time
mark/ink spot 0.8 s
Camera’s field of view 5.7 x 5.7 mm
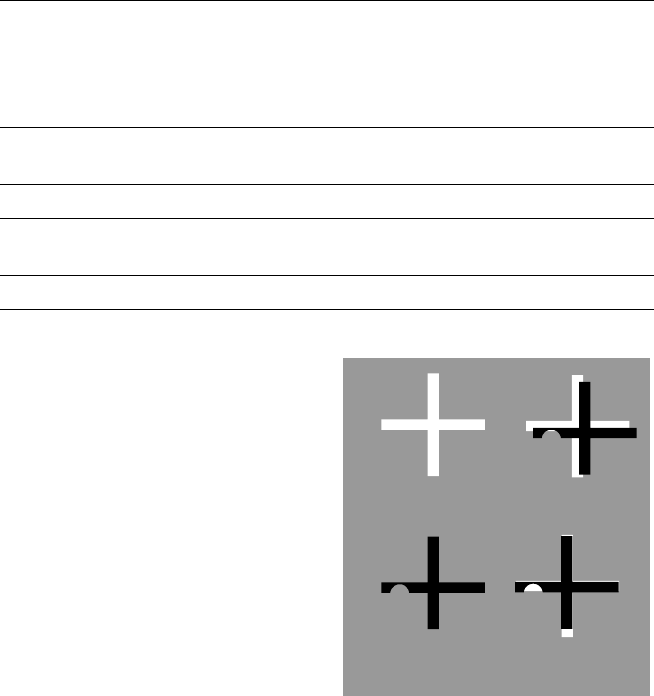
Correlation Principle
Target Low
Structure Correlation
Actual High
Structure Correlation
24
Description
Various fiducial mark shapes prove
to be optimal depending on the
condition of the surface.
In the case of bare copper sur-
faces with little oxidation, the sin-
gle cross is particularly recom-
mended because maximum
recognition reliability is achieved as
the result of the high information
content. Rectangle, square and
circle are less “informative”, but
save space, are rugged and can be
used even if oxidation is advanced.
In the case of tinned structures,
circle or square are recommended
because the ratio between fiducial
dimensions and presoldering thin-
ness is then particularly good.
Vision Sensor Technology:
PCB Position Recognition
Fiducial Mark Criteria
Determine 2 fiducials
Determine 3 fiducials
in addition
X-/Y-position, rotation angle, mean distortion
Shear, distortion in X- and Y-direction
Fiducial shapes
Freely definable via teaching, e.g.,
single cross, rectangle, square, circle
Fiducial surface:
Copper
Tin
Without oxidation and solder resist
Warp ≤ 1/10 of structure width, good
contrast with surroundings
Fiducial dimensions:
Single cross
Rectangle/square
Circle
Length and width: 0.9 - 2 mm
Stroke thickness: 0.3 - 1.0 mm
Edge length: 0.5 - 2 mm
Diameter: 0.5 - 2 mm
Fiducial surroundings
No clearance around the fiducial marks
necessary if there is no similar fiducial
structure within the search area
(5.7 x 5.7 mm).
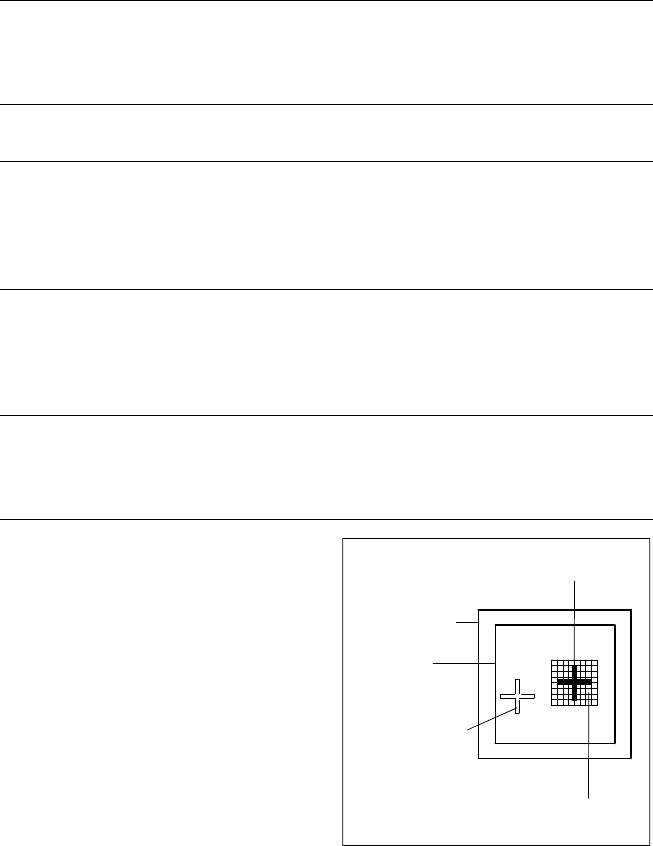
Reference Fiducial
PCB Camera
Field of View
Search
Fiducial to
be Located
Template
Window
25
Description
In the cluster technology each
subpanel is assigned an ink spot.
If this is present during the meas-
urement via the PCB vision mod-
ule, the corresponding subpanel is
not populated. Naturally it is also
possible to prevent the population
of the subpanel when the ink spot
is missing.
With this function it is possible to
prevent costs arising due to un-
necessary population of faulty
subpanels.
P
PP
Po
oo
os
ss
si
ii
it
tt
ti
ii
io
oo
on
n n
n R
RR
Re
ee
ec
cc
co
oo
og
gg
gn
nn
ni
ii
it
tt
ti
ii
io
oo
on
n n
n o
oo
of
f f
f F
FF
Fee
eeee
eed
dd
de
ee
er
rr
r
The pick-up position of the com-
ponent can be determined pre-
cisely with the aid of the position
recognition of the feeder. It is acti-
vated each time after a change of
feeder or component table. The
offset in position relative to the
stored ideal position is determined
on the basis of fiducials on the
feeder modules using the PCB vi-
sion module. This provides a very
high pick-up reliability even for the
very first component. This is par-
ticularly important with small com-
ponents.
Vision Sensor Technology:
Recognition of Faulty PCBs via Ink Spots
Position Recognition of Feeder
Ink Spot Criteria
Fiducial shapes
Single cross (recommended because
susceptibility to disruption lowest)
rectangle, square, circle, etc.
Masking material
Mat dark (light-absorbing)
Not recommended: white or shiny
Size or fiducial masking
Circular: Diameter ≥ 8.1 mm
Square: Edge length ≥ 5.7 mm
Fiducial recognition time
(travel > 100 mm)
Mark masked: 1.2 s
Mark not masked: 0.4 s